一种新型无人自转旋翼机
2017-08-01王道波
孙 瑜,王道波
(南京航空航天大学 自动化学院,南京 210016)
一种新型无人自转旋翼机
孙 瑜,王道波
(南京航空航天大学 自动化学院,南京 210016)
设计了一种动力装置采用矢量推力技术的无人自转旋翼机,提高了机动性,降低了起飞距离,解决了自转旋翼机巡航速度较低等问题;提出一种可促进自转旋翼机机体在军民中的有效应用的双回路混合控制方法。
自转旋翼机;矢量推力技术;混合控制;新构型无人机
自转旋翼机的出现要早于直升机十几年,20世纪20年代问世的自转旋翼机C-3,最先实际应用是旋翼升力原理,自转旋翼机在20世纪三四十年代曾被大量使用,后因直升机发展迅速,自转旋翼机慢慢退出了人们的视野,由于自转旋翼机具有结构简单、成本低、安全性好、操纵简单等特点,近年来再次引起航空界的关注,被广泛地应用在军事领域。进入21世纪以来自转旋翼机方面的研究又有了长足的进展[1]。
尽管常规自转旋翼机的研究在现有的理论基础上已比较成熟[2-3],但是由于其结构和动力上的特点,常规自转旋翼机巡航速度较低、机动性差,在军用、民用领域都受到极大限制。为解决上述问题,目前采用最多的是倾转旋翼方法[4]。虽然倾转旋翼无人机可以有效地解决以上问题,但是其结构相当复杂,并且降低了机型的安全性和稳定性。
矢量推力技术对载人飞机的隐身性、机动性的改善已被广泛验证,矢量推力技术的应用已成为无人机发展的重要趋势。本研究提出了一种无人自转旋翼机,在取消了舵面控制、增大了机翼面积的同时[5],通过两个矢量推力装置协助,为飞行器提供垂直平面内的可变向推力,从而简化结构、增强机动性、提高巡航速度,并实现超短距离起飞。这类机型为国内外首次出现。
1 设计思路
1.1 传统自转旋翼机
传统自转旋翼机是一种由旋翼自转而非动力驱动获得升力的旋翼类飞行器,一般带有一个推进螺旋桨提供前进动力,在这方面和固定翼飞行器类似;在外形方面与直升机非常相似,但在原理和结构方面,自转旋翼机和直升机却有着本质的不同。由于自转旋翼机的结构特点,其机动性、飞行高度和巡航速度都受到限制。
1.2 新型无人自转旋翼机
针对现有自转旋翼机的缺陷,分析自转旋翼机特点,设计了一种新型自转旋翼机[6]。在传统自转旋翼机的基础上,取消舵面,增大机翼面积,在机翼顶端增加了一组矢量推进器,这使其在传统的自转旋翼机基础上,具有超短距离起降、高机动性、快速飞行等特点。进一步改进,可在自转旋翼桨尖增加起飞旋翼喷气管。
在起飞阶段,由于本机型配有起飞旋翼喷气管,起飞旋翼喷气管可以迅速获得高压气流,使自转旋翼转盘获得一定的起飞转速,提高起飞升力,同时本机型的旋翼喷气管较传统预旋不仅轻便、隐藏性好,而且配备有快速解锁脱钩,可在飞机起飞时迅速解锁。矢量推力可将螺旋桨向上偏转一定角度,使得旋翼机实现超短距离起飞。另外,较传统气动力控制而言,采用双矢量推进直接配合自转旋翼气动力形成混合力控制,增加了旋翼机的机动性。当旋翼机达到较高的飞行速度时,可由机翼提供一定的升力,减小了旋翼的迎风阻力,在矢量推力的协助下,实现高速飞行,新型无人自转旋翼机原理样机如图1所示。

图1 新型无人自转旋翼机原理样机
2 机体组成结构
新型无人自转旋翼机由机身、机翼、变推力轴线动力装置、自转动旋翼装置、机载航电系统组成,其结构示意图如图2。
2.1 机身
该型无人自转旋翼机的机身由高强度玻璃纤维制成,内部包含电源、陀螺仪、GPS、控制箱等机载航电系统。需要注意合理分配内部空间,使其有效进行重力配平,使机体重心在轴线上。该型机身较其他固定翼飞机而言气动对于飞机的影响较小,于是设计为隐身度较高的外形。由于该类机型以军用为主,且日常巡航速度较低,可以在一定范围内忽略机身外形的阻力,采用隐身度较高的气动外形。另外,本机型取消机翼和尾翼的舵机控制,可以进一步简化机体结构,增加机型的稳定性。
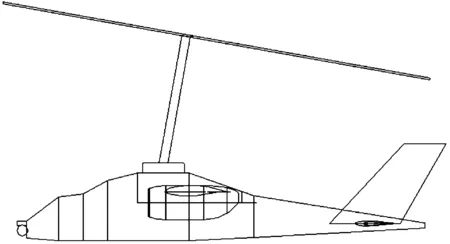
图2 原理样机结构示意图
2.2 无舵面机翼
该型自转旋翼机机身为隐身设计,在低速飞行时风阻的影响可以不考虑,但在高速飞行时所受阻力会大大增加。为了确保旋翼机在高速巡航时的飞行稳定,提高机型的军事用途,设计无舵面机翼,在传统旋翼机机翼结构的基础上,取消舵面,增加两侧机翼面积。这使该型无人机转旋翼机在高速飞行时,机翼可以提供较大升力,保证机身稳定飞行[7]。
2.3 电源
考虑到机身配平和和集成尺寸于便携性,该型无人自转旋翼机内部的电源采用27 V分散式超级锂电池。该型电池不仅具有快充特点,而且可以将电池质量分散,可以有效地进行机体重心配平,同时,使用前,只需较短时间就可以充好电。机身上预留充电孔与充电控制开关。
2.4 变推力轴线动力装置
变推力轴线动力装置固定于安装在机身两侧的无舵面机翼支撑杆轴上,支撑杆轴可以绕杆中点旋转,推进机构与舵机相连,可以使此推进机构指向垂直平面内的任意方向,给机体提供推力矢量。另外,还设计有基于以DSP为核心的发动机控制系统,可以有效地控制发动转速与动力分配,其主要包括核心控制板、温度传感器、转速传感器、油门舵机、执行机构等。
当机体作俯仰运动时,机身左右两侧的动力装置同时产生正向/副向偏转,产生的推力相对重心产生正向/副向力矩;当机体作滚转运动时,机身左右两侧的动力装置产生差动偏转,产生的推力相对重心产生异向力矩。
2.5 模块化飞控系统
为了保证无人自转旋翼机的稳定性与高效能,本研究设计了模块化的飞控系统,包括信号调理、电源分配、功率放大、核心处理、任务执行等,将每个功能模块单独设计并封装硬件,配置统一接口,增加了整个系统的可移植性。
整个飞控系统以飞控计算机为核心,飞控计算机接收地面测控站发出的操控指令,通过指令选择识别,将不同的指令信号进入对应的控制率解算回路,并将解算结果通过功率放大输出给相应执行结构。同时,飞控计算机采集飞行参数信息,通过机载电台与地面测控站通信,保证地面操纵人员有效控制。
3 混合控制方法与技术指标
3.1 混合控制方法
参考串级控制思路,采用如图3所示混合控制策略,即在自转旋翼桨盘气动力的基础上,增加推力变向直接力控制装置[8]。本研究控制器装置分为内环回路和外环回路,如图4所示,内环回路是姿态回路,外环回路包括位置回路和高度回路。为使控制系统同时具有良好动态特性与阻尼特性,关于姿态控制均采取角位置与角速率双闭环反馈控制回路[9]。
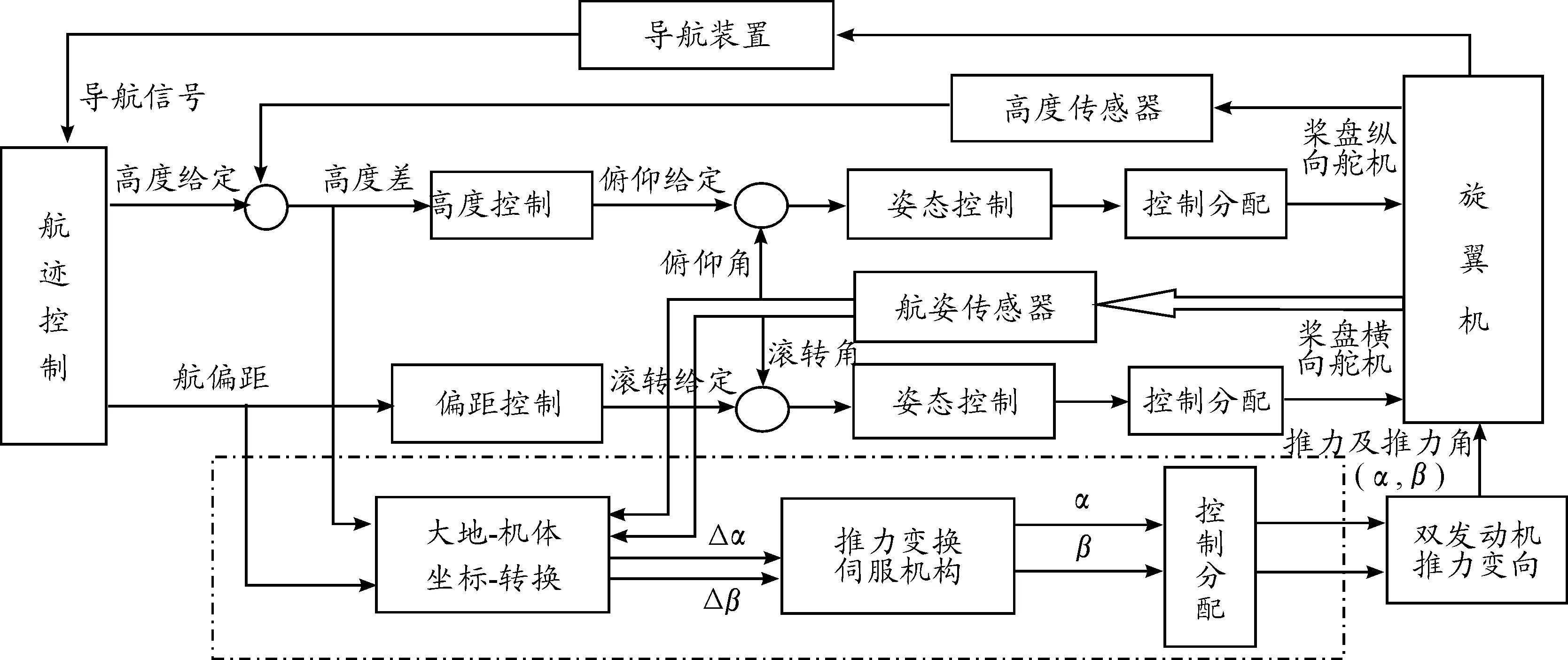
图3 混合控制策略
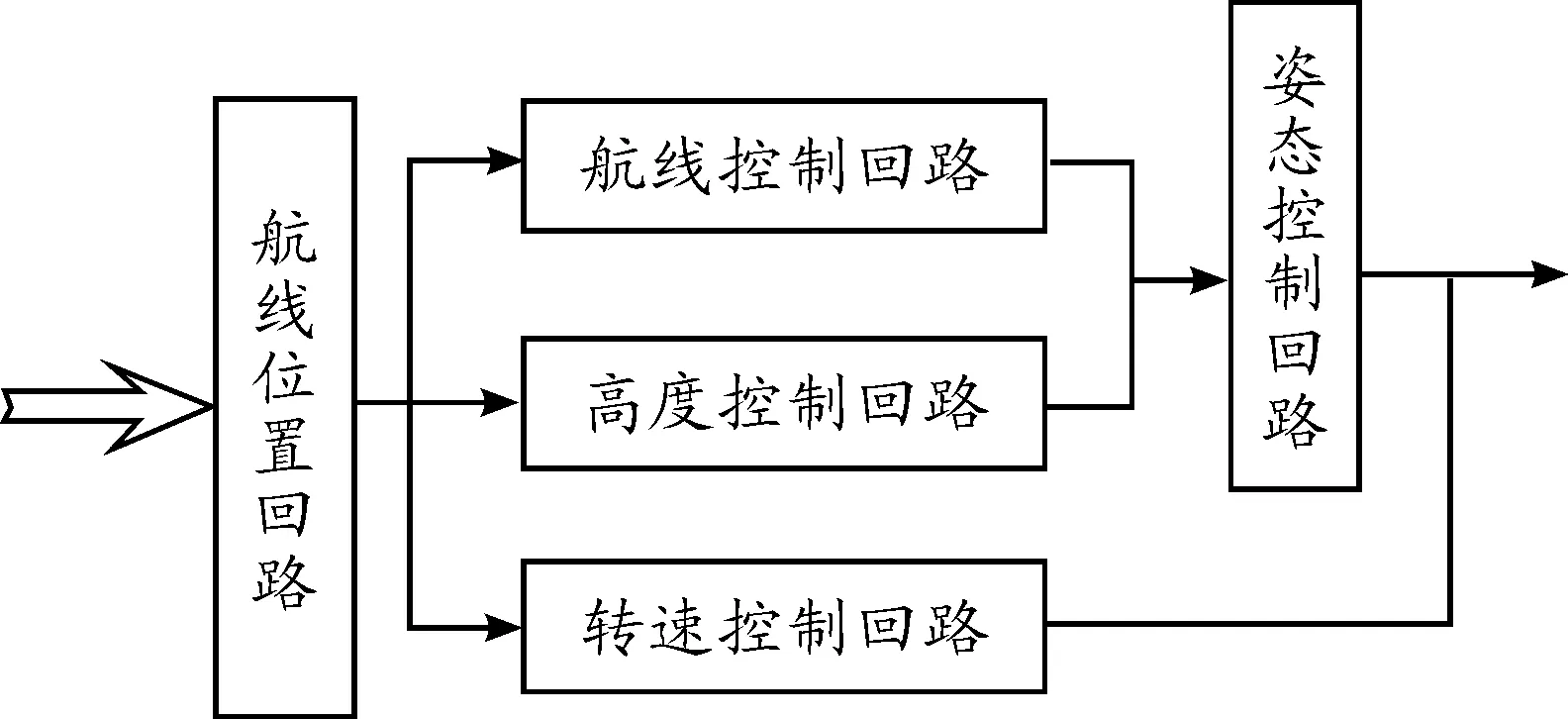
图4 控制回路说明
3.2 战术技术指标
考虑到成本问题,设计机型为缩比的原理样机,所设计的实际机型质量约为250~300 kg,可携带40~50 kg载荷,飞行速度可达 250 km/h。缩比原理样机技术指标如下[10]:
1) 起飞距离:小于15 m;
2) 爬坡坡度:50°左右;
3) 航向变化率:45°~60°;
4) 每秒转弯半径:最小约为120 m;
5) 飞行速度:约为20~40 m/s;
6) 机体满油质量:35 kg;
7) 任务载荷:15~20 kg。
4 结论
由于本机型具有超短距离起降的特点,对于起降环境要求较低;又因其负载较大,可以在机体上安装大型任务设备;同时,机动性大、允许巡航速度范围广,使得该机型可以完成多种任务。由于以上特点,本机型可用于军用运输、边防巡查、舰载机、仿直升机特性靶机等;也可在恶劣环境下进行民用任务,如森林防火、农药喷洒、航测、救灾物资运输等等。
[1] 王俊超,李建波,韩东.自转旋翼机飞行性能理论建模技术[J].航空学报,2014,35(12):3244-3253.
[2] 王寅,王道波.在线滚动优化下的无人自转旋翼机自动起飞控制[J].控制理论与应用,2015,32(11):1526-1533.
[3] 郭剑东,宋彦国.小型无人倾转旋翼机气动与操纵特性试验研究[J].空气动力学学报,2015,33(1):107-112.
[4] 陈嘉先,梁波.倾转旋翼无人机模态转换控制[J].战术导弹技术,2015(2):70-76.
[5] 王俊超,李建波.机翼对自转旋翼机纵向稳定性的影响[J].航空学报,2014,35(1):151-160.
[6] 陈淼.自转式无人旋翼机飞行控制技术研究[D].南京:南京航空航天大学,2011.
[7] 黄俊.飞机最优巡航条件的确定[J].飞行力学,1996(2):60-64.
[8] 浦黄忠,甄子洋,黄国勇,等.变推力轴线无人机的混合姿态控制[J].南京理工大学学报,2010,34(5):596-601.
[9] 黄国勇,甄子洋,王道波.变推力轴线无人机的建模与机敏性分析[J].南京航空航天大学学报,2010,42(2):170-174.
[10]温瑞英,魏志强,王红勇,等.民用飞机巡航性能计算研究[J].飞行力学,2015,33(4):289-292.
(责任编辑 周江川)
A New Type of Auto-Rotating Rotor UAV
SUN Yu, WANG Daobo
(College of Automation, Nanjing University of Aeronautics & Astronautics, Nanjing 210016, China)
This paper designs a new type of auto-rotating rotor UAV. It improves the maneuverability of the auto-rotating rotor UAV, and reduces the takeoff distance, and solves the problem of low cruise speed. The new type of auto-rotating rotor UAV using vector thrust technology. A double loop hybrid control method is proposed. This can promote the effective application of the typical rotor body in military and civilian.
rotational rotorcraft; vector thrust technology; hybrid control; new configuration of UAVs
10.11809/scbgxb2017.07.018
2017-03-15;
2017-04-20
江苏省研究生培养创新工程(SJLX16_0100);研究生创新基地(实验室)开放基金(kfjj20160323)
孙瑜(1990—),男,硕士研究生,主要从事无人机控制系统研究。
format:SUN Yu, WANG Daobo.A New Type of Auto-Rotating Rotor UAV[J].Journal of Ordnance Equipment Engineering,2017(7):82-84.
TJ85;V271.4
A
2096-2304(2017)07-0082-03
本文引用格式:孙瑜,王道波.一种新型无人自转旋翼机[J].兵器装备工程学报,2017(7):82-84.
