基于模糊控制算法的同步风挡雨刷控制器*
2017-07-31李云红张亚林王震亚
李云红,张 恒,张亚林,王震亚
(西安工程大学电子信息学院,西安710048)
基于模糊控制算法的同步风挡雨刷控制器*
李云红,张 恒,张亚林,王震亚
(西安工程大学电子信息学院,西安710048)
针对某客机风挡雨刷控制系统的设计缺陷,提出一种基于模糊控制算法的同步风挡雨刷控制器设计方案。该系统通过手动操作选择主、从两组风挡雨刷工作档位,实时捕获并记录雨刷工作周期,将主控雨刷工作周期分量T及主控与从控雨刷的工作周期差量ΔT作为模糊控制系统的两个输入量,经模糊控制系统输出主控雨刷控制信号U,实时调节主控雨刷的工作周期,从而实现两组风挡雨刷单独或精准地同步控制。
模糊控制;风挡雨刷;同步控制器;客机;主从控制;实时调节
1 引言
MD-90飞机的风挡雨刷原先由一个四位开关控制,后来为了提高安全性,避免因操作开关故障而使两个风挡雨刷都不能工作,因而改为由两个四位开关分别各自操纵一个雨刷[1-2],由此带来了两组风挡雨刷无法精准同步协作的问题。针对这一设计缺陷,设计了基于模糊控制算法的同步风挡雨刷控制器。
模糊控制属于智能控制范畴,它是以模糊集合论、模糊语言变量和模糊逻辑推理为基础的一种计算机数字控制技术。模糊理论作为现代信息科学的一个重要概念和方法论,它的科学性和有效性越来越引起人们的重视[3-5]。随着模糊控制理论的完善和模糊控制技术的成熟,模糊控制器也得到了实际应用,它无需建立精确的数学模型,而是由人的经验知识和思维进行推理。因此模糊控制技术对于难以获得数学模型和模型粗糙的系统有独特的控制优势,克服了非线性因素对系统造成的影响[6-9]。
基于模糊控制算法的同步风挡雨刷控制器能够实现MD-90客机上主、从两组风挡雨刷分别单独工作以及精准地同步协作。利用模糊控制技术对于难以获得数学模型和模型粗糙系统独特的控制优势,克服了非线性因素对雨刷控制系统造成的影响[10],同时在一定程度上减少计算量,提高控制器的实时控制效果。
2 基于STM 32的风挡雨刷控制器设计
基于STM32的同步风挡雨刷控制器由主控制单元、从控制单元及串行通信接口单元组成,主、从控制单元的硬件结构相同,风挡雨刷控制器原理图如图1所示。
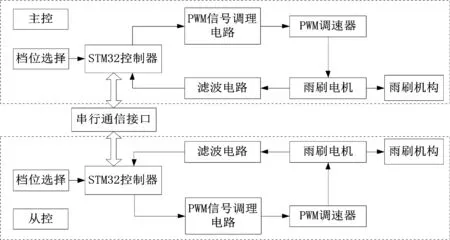
图1 风挡雨刷控制器原理图
同步风挡雨刷控制器有两个工作模式:主、从风挡雨刷单独工作模式及同步协作模式。单独工作时,主、从风挡雨刷可分别实现高速、中速、低速、停止四个档位的切换;当主、从风挡雨刷运行过程中处于同一档位时,系统开启同步协作模式。基于串口通信的相关协议,主控制单元实时接收到由从控制单元发送的雨刷运转周期数据并实时改变自身雨刷电机的转速,从而实现主、从风挡雨刷精准地同步控制。另外,从控制单元也实时接收由主控制单元发送的雨刷位置、是否开启同步等信号用以实现同步协作。
主、从控制单元的基本结构主要由档位选择模块、STM32控制器、PWM信号调理电路、PWM调速器、雨刷电机、滤波电路、雨刷机构、串行通信接口等部件构成。其中,档位选择模块用以实现风挡雨刷不同速度档位的切换及控制器工作模式的选择。STM32控制器根据接收到的档位信号判断风挡雨刷控制器的工作模式,结合串行通信接口等信息,输出PWM(脉宽调制)信号控制雨刷电机的摆动速度,驱动雨刷机构扫除挡风玻璃上的雨水,并在同步工作模式下控制主、从风挡雨刷精准地同步协作。
3 模糊控制算法设计与实现
3.1 采集数据处理
通过实验测得在风挡雨刷控制器输入档位不同时,主控风挡雨刷摆动一周所需的时间(工作周期),并且从大量的实验数据中抽出具有代表一般性的一组数据如表1所示。
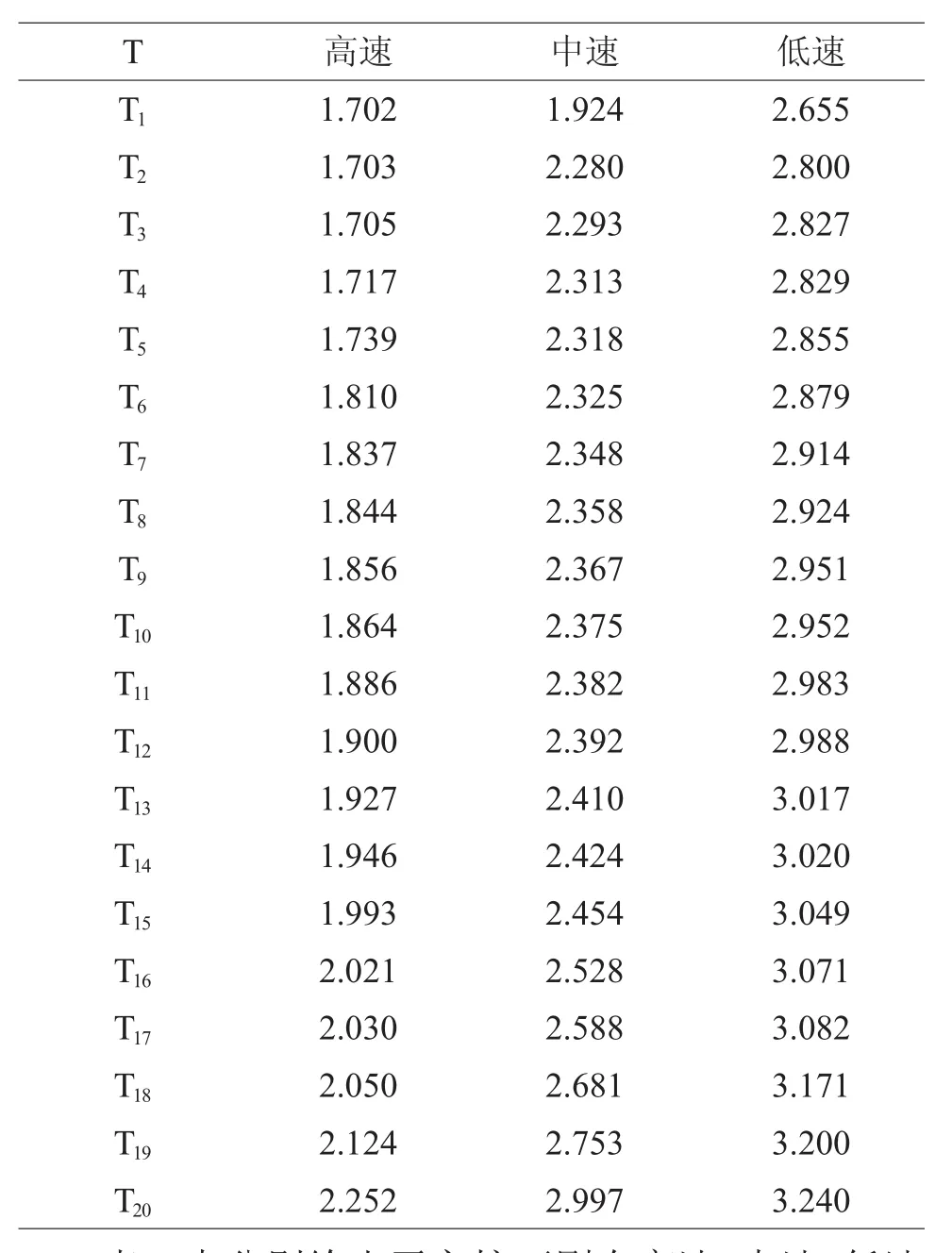
表1 主控雨刷工作周期T(单位:s)
表1中分别给出了主控雨刷在高速、中速、低速档位时工作周期T的20个数据。由表格1可以发现,当主控雨刷处于高速档位时,其工作周期T(单位:s)集中分布于[1.7,2.0]区间;中速档位时,其工作周期T(单位:s)集中分布于[2.3,2.6]区间;低速档位时,其工作周期T(单位:s)集中分布于[2.8,3.2]区间。
实验又测得从控风挡雨刷的工作周期数据,并计算主控与从控雨刷工作周期差量ΔT,发现ΔT(单位:s)集中分布于[-0.6,0.6]区间。令T和ΔT作为模糊控制器的两个输入,设定控制规则,即得到模糊控制器。
3.2 模糊控制器设计
首先对模糊控制器的两个输入量T与ΔT进行模糊化,由于主控雨刷工作周期分量T的取值范围是(1.7,3.2),主控与从控雨刷工作周期差量ΔT的取值范围是(-0.6,0.6),为了简化算法,分别将T与ΔT的取值范围对应转化为(0,1)与(-1,1),以此作为两个输入模糊集合,U则设定为主控雨刷输出控制信号的模糊集合。μ(T)和μ(ΔT)作为输入隶属度函数。T的隶属度函数为:

μmin(T),μmid(T),μmax(T)分别表示为:
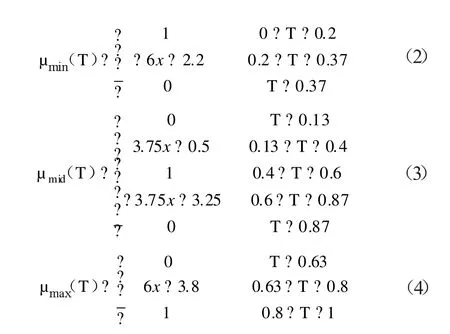
ΔT的隶属度函数为:

其次是建立模糊控制规则。模糊控制规则是模糊控制器的核心,它相当于传统控制系统中的校正转置或补偿器,是设计控制系统的主要内容[11-13]。根据雨刷控制的实际要求,结合对系统进行测试实验、对系统的输入—输出数据进行分析,归纳总结同步风挡雨刷控制器的模糊控制规则R:
R1:IF(Tis min)and(ΔTis min)then(Uis min)
R2:IF(Tis mid)and(ΔTis min)then(Uis mid)
R3:IF(Tis max)and(ΔTis min)then(Uis max)
R4:IF(Tis min)and(ΔTis max)then(Uis mid)
R5:IF(Tis mid)and(ΔTis max)then(Uis max)
R6:IF(Tis max)and(ΔTis max)then(Uis max)
R7:IF(Tis min)and(ΔTis min(-))then(Uis min)
R8:IF(Tis mid)and(ΔTis min(-))then(Uis mid)
R9:IF(Tis max)and(ΔTis min(-))then(Uis max)
R10:IF(Tis min)and(ΔTis max(-))then(Uis min)
R11:IF(Tis mid)and(ΔTis max(-))then(Uis min)
R12:IF(Tis max)and(ΔTis max(-))then(Uis mid)
主控雨刷输出控制信号U的隶属度为:

通过实验确定[p q r]的参数为:
R1:[-0.7473-0.6247 0.8523];
R2:[-0.7040-0.2914 0.7239];
R3:[-0.4719-0.2944 0.5587];
R4:[-1.7323 0.0711 0.5834];
R5:[-0.7494-0.1783 0.6798];
R6:[-0.6492-0.2186 0.6984];
R7:[0.1626-1.4904 0.4350];
R8:[-0.8446-0.3487 0.7819];
R9:[-0.5615-0.1627 0.6430];
R10:[-1.1819 0 0.8598];
R11:[-1.5950-0.1824 1.3306];
R12:[-0.7393-0.2789 0.7534];
建立了输入输出的语言变量、隶属度函数和模糊规则后,需要确定模糊推理的合成规则,这里采用“最大—最小”合成规则,输出合成采用连接词also计算[14]。以R1为例,最终确定合成运算为:

式中,μ(R1)为μmin(T)μmin(ΔT)μmin(U),μmin(T*)和μmin(ΔT*)为输入隶属度函数,模糊规则μmin(U*)为输出隶属度函数,以此类推。
3.3 模糊控制算法仿真
设定输入量主控雨刷工作周期分量T与输出量主控雨刷控制信号U的隶属度取值范围为 [0,1],输入量主控与从控雨刷工作周期差量ΔT的隶属度取值范围为[-1,1],然后对系统进行Matlab仿真,系统输出量U的曲面观测窗如图2所示。
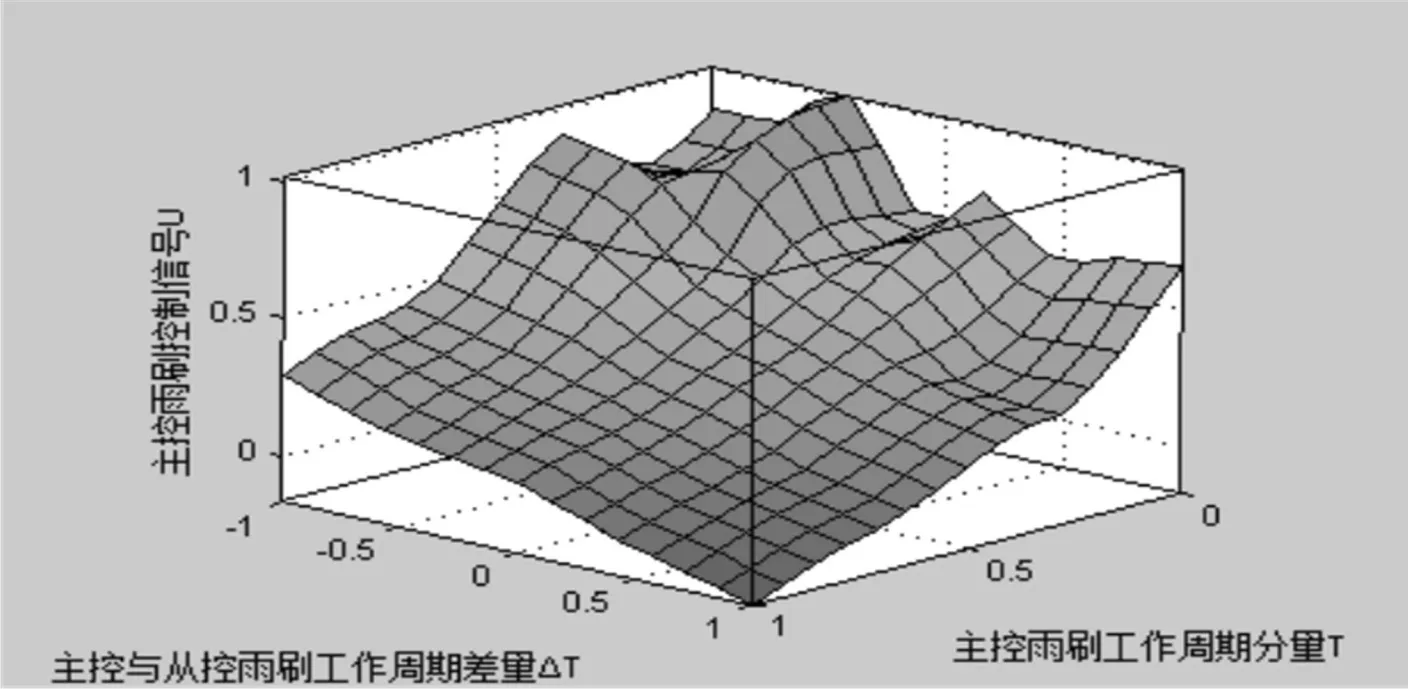
图2 系统输出量U曲面图
图2表示了系统在整个论域上输出量U与输入量T、△T的关系。从系统输出量曲面图可以看出,整个论域内曲面连续、光滑且平缓,表明设计的模糊控制算法控制性能优良。
为了更好的说明本模糊控制算法的性能,选取一组具有一般性、覆盖整个论域的30组T、△T输入数据,通过控制系统得出输出数据U,并与相对应的理论输出数据U*对比,计算实际输出与理论输出之间的相对误差Y,从而定量分析系统的控制性能。模糊控制算法的误差分析表如表2所示。
实验测试结果表明,设计的模糊控制器的输出信号能够实现风挡雨刷控制系统中主控雨刷器与从控雨刷器精准地同步控制,可将控制系统的绝大部分误差控制在5%之内,从而达到预期的控制效果。
模糊控制是智能控制的一个重要分支,提出的模糊控制算法与常规PID控制相比具有无需建立被控对象的数学模型、对被控对象的时滞、非线性和时变性具有一定的适应能力等优点,同时对噪声也具有较强的抑制能力。两种算法的控制结果如图3、4所示。
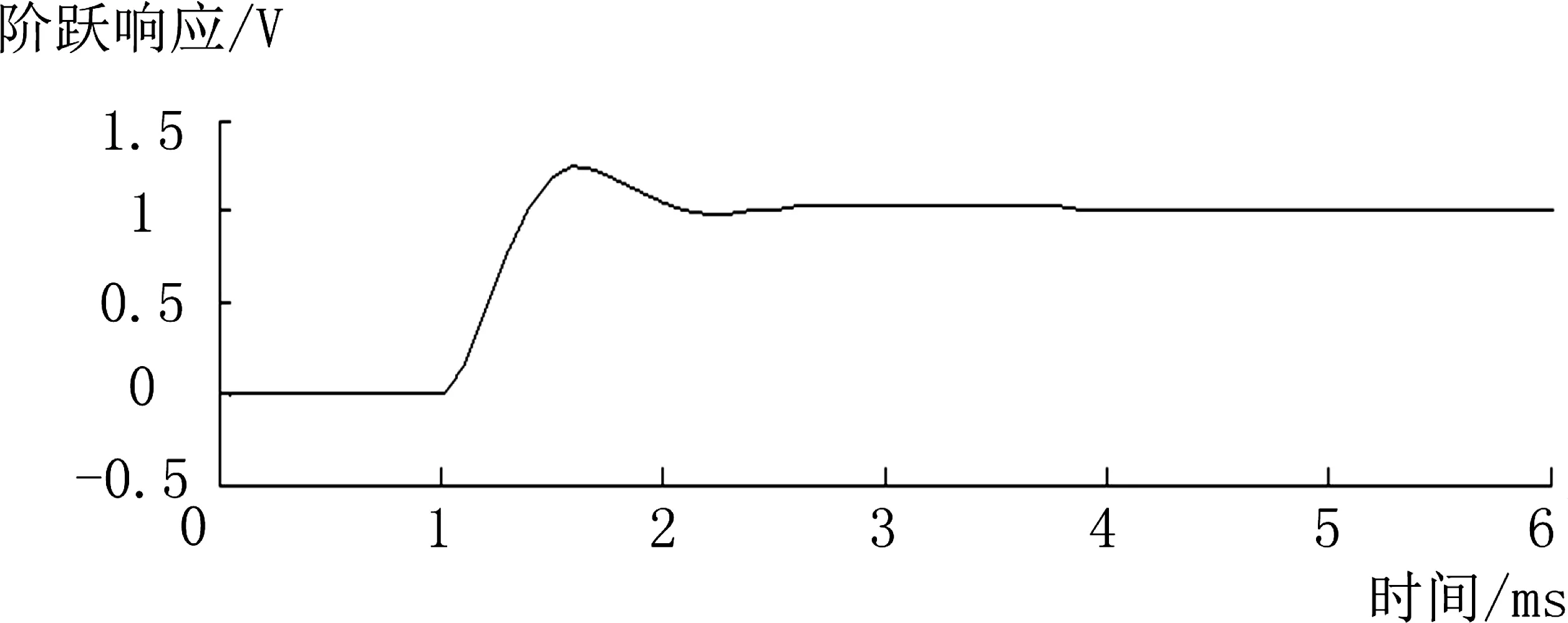
图3 PID控制系统仿真结果
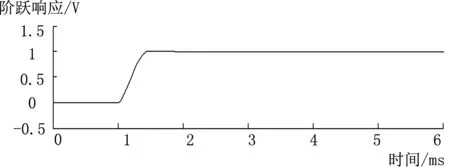
图4 模糊控制系统仿真结果
由仿真结果可知,模糊控制与PID控制相比具有调节速度快、超调量小且响应平稳等特点。
4 结束语
设计的基于模糊控制算法的同步风挡雨刷控制系统采用STM32作为控制器,采用模糊控制算法对控制器采集的信号进行处理,根据模糊控制算法的输出结果实现两组风挡雨刷精准地同步控制。
实验结果表明,该同步风挡雨刷控制系统具有较高的控制精度,同时根据实际情况还可增加或减少模糊控制器的控制规则,使系统保持良好的动态性能,以此来保持风挡玻璃的清晰度,在雨雾天气给驾驶员更好的视野,保证驾驶员的安全。同时,系统设计简洁,性能可靠,具有较高的使用价值和很好的市场前景。
[1]谭正文,王大伟,李革萍,等.民机雨刷性能验证研究[J].航空计算技术,2015,45(6):122-124.TAN Zhengwen,WANG Dawei,LI Geping,et al.Research on Civil Aircraft Wiper Performance Validation[J].Aeronautical ComputingTechnique,2015,45(6):122-124.
[2]刘鹏.MD-90防冰除雨系统设计分析[J].民用飞机设计与研究,2002(4):27-31. LIU Peng.Design and Analysis of Anti-icing and Rain-removingSystemofMD-90[J].Civil Aircraft Design&Rsearch,2002(4):27-31.
[3]崔涛,魏承恩.模糊控制器硬件实现综述[J].现代电子技术,2002(9):94-96. CUI Tao,WEI Chengen.Hardware Realizat ion of Fuzzy Controller[J].Modern Electronic Technique,2002(9):94-96.
[4]张朝祥,许伟明.基于模糊控制理论的智能雨刷控制器[J].计算机测量与控制,2011,19(2):309-311. ZHANG Chaoxiang,XU Weiming.An intelligent wiper controller based on fuzzycontrol theory[J].Computer Measurement&Control,2011,19(2):309-311.
[5]张恒,李云红,李晓东,等.风挡雨刷控制系统设计[J].西安工程大学学报,2015,29(3):332-335. ZHANG Heng,LI Yunhong,LI Xiaodong,et al.Design of synchronous control system on wipers[J].Journal of Xi’an Polytechnic University,2015,29(3):332-335.
[6]Levine J.On the synchronization of a pair of independent windshield wiper[J].IEEE Transactions on Control Systems Technology,2004,12(5):787-795.
[7]黄卫华.模糊控制系统及应用[M].北京:电子工业出版社, 2012:94-97. HUANGWeihua.Fuzzycontrol systems and applications[M]. Beijing:Publishing House of Electronics Industry,2012: 94-97
[8]Hassan A.Yousef,Mohamed Hamdy.Observer-based Adaptive Fuzzy Control for a Class of Nonlinear Time-delay Systems[J].International Journal of Automation and Computing, 2013,10(4):275-280.
[9]万磊,张英浩,孙玉山,等.复杂环境下的欠驱动智能水下机器人定深跟踪控制[J].上海交通大学学报,2015,49(12): 1850-1854. WANG Lei,ZHANG Yinghao,SUN Yushan,et al.Depth Control ofUnderactuated AUVUnder Complex Environment[J].JOURNAL OF SHANGHAI JIAO TONG UNIVERSITY,2015,49(12):1850-1854.
[10]王凯,黄玲,都磊.二级倒立摆的T-S模糊建模和模糊控制[J].控制工程,2015,22(S0):47-50. WANG Kai,HUANG Ling,DU Lei.T-S Fuzzy Modeling and FuzzyControl ofInverted Pendulum[J].Control EngineeringofChina,2015,22(S0):47-50.
[11]Mohammad Mehid Fateh,Sara Fateh.A Precise Robust Fuzzy Control of Robots Using Voltage Control Strategy[J]. InternationalJournalof Automation and Computing, 2013,10(1):64-72.
[12]FENGJian,WANGShen-Quan.Reliable FuzzyControl for a Class of Nonlinear Networked Control Systems with Time Delay[J].ACTA AUTOMATICA SINICA,2012,38(7): 1092-1099.
[13]杨文臣,张轮,张孟,等.城市交通信号三级模糊滑动优化控制方法[J].同济大学学报(自然科学版),2014,42(12): 1847-1853,1867. YANGWenchen,ZHANGLun,ZHANGMeng,et al.Rolling horizon Optimization-based Three-stage Fuzzy Logic Controller for Urban Traffic Signals[J].JOURNAL OF TONGJI UNIVERSITY (NATURAL SCIENCE),2014,42(12): 1847-1853,1867.
《微处理机》2018年度征订通知
《微处理机》期刊由中国电子科技集团公司第四十七研究所主办,是经国家科委批准的国家级工程技术刊物,并被《中国科技论文统计与分析》和《中国电子科技文献数据库》以及Internet网上的重要源数据检索刊物之一。自办,国内外公开发行。
主要刊载国内外最新的各种微处理器、微控制器、微机外围电路、专用电路的发展动态、设计、测试、开发与应用和微机系统与微机软件的开发以及微机在各领域中的应用等方面的科技论文。
本刊系双月刊,大16开本96页。全年定价:90.00元。
用户可直接向天津半导体杂志社订购(代号:8385),有漏订的用户可直接在我处订阅。
通讯地址:沈阳市皇姑区陵园街20号《微处理机》编辑部 邮编:110032
开 户:中国电子科技集团公司第四十七研究所
账 号:2100 1423 6010 5000 5715
开户银行:建行三台子支行
投稿须知
为使来稿更符合国家科技期刊格式标准,避免多次退修,特向作者提出以下要求:
1.题名
文章题目在20个字以内(包括中英文、数字及符号),名应简明、具体、确切地概括文章的要旨,英文题目中各个实词的首字母应大写。
2.摘要
应有中英文摘要。摘要要求表达简练,语义确切,结构严谨;应包括目的、方法、结果和结论;用第三人称编写;应反映文章的主要内容,中文摘要不得少于250个字。
3.关键词
关键词6个以上,且中文关键词不可以全为缩写的英文字母(可以添加“协议”、“技术”等说明性词语,且英文务必严格对应。
4.作者
文章应有作者署名,中国作者的英译名用汉语拼音,姓氏及名字首字母大写,中间用半空分开。5.作者简介及工作单位
6.基金项目
来稿请注明基金资助情况(基金类别、基金项目名称及编号)、论文获奖情况(重要奖项的论文将给予优先处理),获专利的文章请注明专利名称及专利号。
7.图表和公式应保证清晰,不能用扫描方式录入。图表不用彩色,图中的中文字体为宋体,中英文均不要加粗。图、表要求有图号、图名、表号、表名,并且要在文中引用。
8.参考文献8条以上,从文献1开始,按顺序在正文中逐条引用,文献请按以下规范书写(中英文对照):
(1)刊物:作者名(≤3个全部列出,>3个列前3个后加等).文章名[J].期刊名,年,卷(期):起止页.
(2)书籍:作者名(≤3个全部列出,>3个列前3个后加等).书名[M].出版地:出版单位,年.
(3)学位论文:作者名.论文名[D].学校所在城市:学校,年.
(4)会议论文集:作者名(≤3个全部列出,>3个列前3个后加等).文章名[C]//会议名.出版地:出版单位,年.
(5)电子类文献:作者名(≤3个全部列出,>3个列前3个后加等).文章名[文献类型/文献载体标志].(发表或更新年月日)/[引用年月日].获取和访问路径.
9.请在文章最后给出前3位作者的联系方式(长期有效的手机、电话及E-mail)。
10.所有涉密单位论文须经所在单位保密审查通过后方可投稿,否则,后果自负。
11.本刊现入编多种网络数据库,作者著作权使用费与本刊稿酬一次性给付,作者如不同意将文章入编,投稿时敬请说明。
12.本刊已正式成为“中国知网”学术期刊优先数字出版试点单位,因此,会选择优秀的已录用论文提前发布到“中国知网”学术期刊数字出版平台上。如不同意提前发表,请特别说明。
请作者务必保证稿件内容的原创性,所有论文如有数据不实、抄袭、剽窃、侵权等不良行为,将通知其单位负责人,本刊不承担连带责任,并且以后将拒收第一作者的投稿。
投稿电子信箱(wclj@nemi.net.cn;wclj001@sina. com)投稿(Word 2003格式),恕不退稿;文章发表后,本刊享有该文的专有出版权,未经书面同意,不得转载。
Synchronous Windshield Wipers Controller Based on Fuzzy Control Algorithm
Li Yunhong,Zhang Heng,Zhang Yalin,Wang Zhenya
(College of Electronics and Information,Xi`an Polytechnic University,Xi`an 710048,China)
For the defects of design on the aircraft windshield wipers control system,we propose a synchronous windshield wipers controller based on fuzzy control algorithm.The system manually selects work gear from two windshield wipers,captures in real-time,and records wipers work-cycle. The wiper's cycle T of the main component and the difference wiper's cycle ΔT between the main component and the appurtenant component are chosen as two inputs of the fuzzy control system.U,as the control signal of the main component,is output by the fuzzy control system.So the cycle of the main component can be adjusted by the real-time,in order to achieve independent or precise synchroni-zation control of the two windshield wipers.
Fuzzy control;Windshield wipers;Synchronous controller;Airliner;Master-slave control;Real-time adjustment
10.3969/j.issn.1002-2279.2017.02.021
TP271
A
1002-2279-(2017)02-0091-05
姓名(出生年-),性别(民族),籍贯(省市或县),职称/学位,主要研究方向,E-mail地址;其他作者姓名,职称/学位。标题下方每位作者须标注上相应的单位。单位要具体到二级单位,并给出其所在省份、城市及邮编。文章一经修改完成上传至网站后,作者及单位不得改动。
国家自然科学基金项目(61401347);西安工程大学2016年度研究生创新基金(CX201617);陕西省科技厅自然科学基础研究计划资助项目(2016JZ026)
作者简介:李云红(1974-),女(满族),辽宁省锦州市人,教授,博士,主研方向:信号与信息处理技术、图像、红外热像测温技术。张恒(1991-),男,硕士研究生,主研方向:信号与信息处理技术。
2016-11-09
