锅炉汽包液位模糊PID控制的应用研究
2017-07-31吴鹏彬李斌柏勇秦婷
吴鹏彬,李斌,柏勇,秦婷
(昌吉学院物理系,新疆昌吉831100)
装备运行管理
锅炉汽包液位模糊PID控制的应用研究
吴鹏彬,李斌,柏勇,秦婷
(昌吉学院物理系,新疆昌吉831100)
通过分析锅炉汽包液位的扰动成因,在常规PID控制基础上,引入模糊推理机制。借助仿真软件搭建控制系统,依据现场工况推理整定出PID控制参数并运算得出控制仿真曲线。结果表明各动静态指标有所提高,控制品质得到提升。结论对实际应用具有一定的参考价值。
汽包液位;模糊PID;仿真;参数优化
锅炉在火电、化工、冶金等生产行业是主要的热能和动力设备。在锅炉的水汽回路中,如果汽包液位控制不及时,会造成停车,影响到安全生产。因此汽包液位的控制品质在锅炉安全稳定的运行中至关重要[1-2]。工程中常采用便于整定的常规PID作为主控制器[3],然而汽包液位具有非线性、大滞后、容量滞后等特性,并且存在虚假水位等测量控制难点[4],实际工况中,由于负荷、汽泡等干扰,PID控制器容易脱离其工作点影响到控制指标,有时还会造成执行机构频繁动作[5]。若借助模糊推理针对不同的偏差匹配出合适的PID参数,则可提高PID的工作性能,扩大其有效工作区间,从而改善系统的动静态性能,提高控制品质。
1 汽包液位控制特性分析
汽包的正常液位一般为汽包中心线下50~200 mm之间,水位偏差范围要求在[-50,50]mm.在汽包发生蒸汽过程中会受到多种干扰,包括给水流量干扰,汽包内的气泡破裂引起的检测量变化的干扰,汽机负荷变化引起的蒸汽转化的干扰,这些干扰会导致液位波动变化较大。当液位产生偏差大需要尽快恢复恒定时,控制器应有较大输出使电动阀开度增加,PID调节参数比例增益KP整定的就要大一点,液位偏差较小时,较大的KP又会使系统产生超调。所以单纯一组PID参数的控制器,一旦偏离工作点,则控制效果明显下降。如果利用模糊规则推理出PID控制器不同工作点的PID参数增量,依据不同的偏差区间对应不同的PID参数,控制器最终输出值也会对应不同偏差,从而使得系统能跟随液位波动实现分段化精准控制。
汽包液位与给水流量的动态关系可以用相当于一个积分环节和一阶惯性环节组合的传递函数来描述,对新疆某企业自备电厂调试参数进行曲线拟合,作图可得增益和惯性时间。传递函数见仿真结构图。
2 模糊PID控制器设计
锅炉汽包液位系统调节过程中,给水流量、蒸汽流量均可测定。负荷侧蒸汽流量不可控,其干扰可通过前馈器减小,给水流量干扰经副调节器也可减小,所以主要在主调节器进行模糊PID控制。
模糊PID控制器结构如图1所示,在常规PID控制的基础上利用模糊推理整定参数。先将PID的三个参数与偏差e、偏差变化率ec建立一种模糊关系。系统在控制过程中,不断检测偏差e和偏差变化率ec,按照设定好的模糊逻辑推理出KP、Ki、Kd以适应不同的偏差区间和变化速率的PID.

图1 汽包液位模糊PID控制结构
2.1 确定输入输出变量
模糊逻辑处理的过程包括:输入模糊化、模糊推理计算和输出解模糊。偏差e和偏差变化率ec足以表征系统动态特性,故可设计二维模糊控制器如图1所示,输出为KP、Ki、Kd,则PID控制器的KP、Ki、Kd实际可表示为:KP=KP0+△KP,Ki=Ki0+△Ki,Kd=Kdo+△Kd,式中,KP0、Ki0、Kdo为PID的最小工作点初始参数,经工程整定所得。
考虑到控制速度和精度的协调,将输入e、ec划分了7个模糊量,其子集为:{负大、负中、负小、零、正小、正中、正大},简记为:{NB、NM、NS、ZO、PS、PM、PB},论域边界为:[-6,6];输出Kp、Ki、Kd划分了3个模糊量,论域为:[-3,3]。量化因子和比例因子依据映射关系在仿真过程中调整。隶属度关系选择运算简单的对称三角型以提高响应速度。输出清晰化过程采用更平滑的重心法以提高响应精度。
依据上述过程在Matlab中建立模糊结构如图2所示。
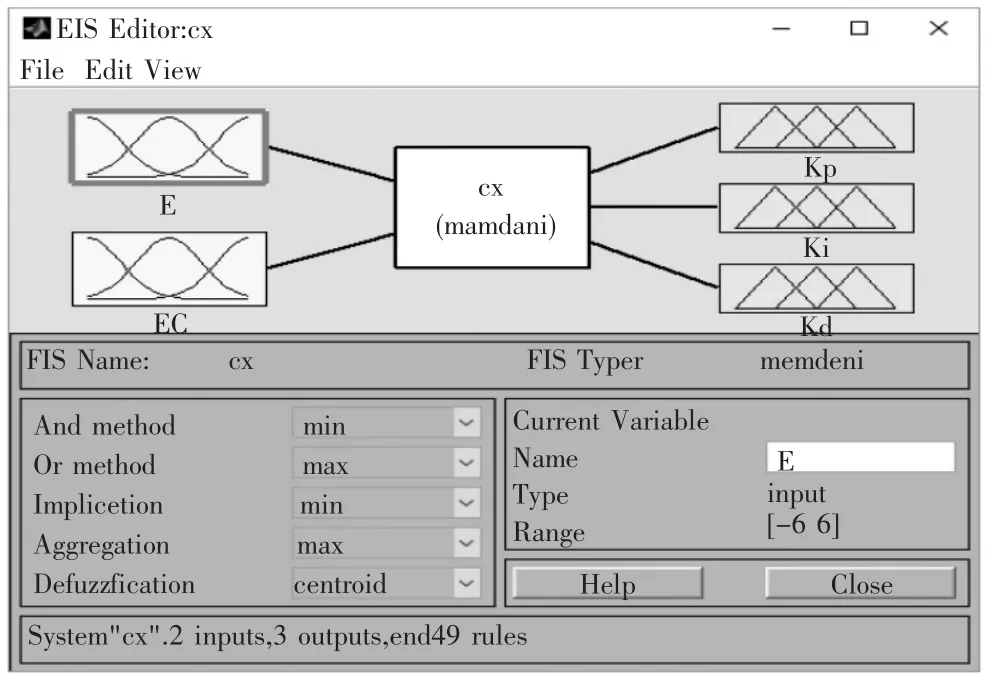
图2 模糊推理结构FIS
2.2 模糊规则建立
在偏差纠正偏差的反馈原理基础上,依据PID参数对系统控制指标的影响趋势,结合汽包液位的动态控制特性,并在总结工程技术人员技术知识和整定经验的基础上确定了49条△Tp、△Ti、△Td输出模糊规则,表1给出了部分规则描述。
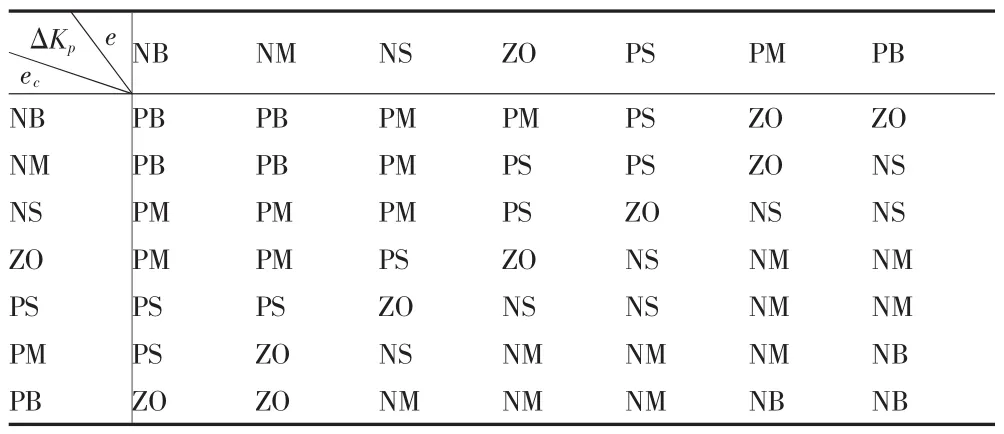
表1 ΔKp的模糊控制规则表
仿真运行过程中,锅炉液位控制系统利用上述模块控制规则完成对PID参数的在线自整定,不断检测偏差e和偏差变化率ec,以最快速度找出PID三个参数和e与ec的模糊关系。通过参数的在线调整使得模糊PID控制系统的响应速度、超调量、稳态误差都比单一的PID控制或模糊控制效果更好。
3 系统仿真及分析
3.1 系统仿真
在MATLAB的Simulink环境中调用Fuzzy、PID等元件完成系统连接并进行相关参数设定,液位模型依据新疆某化工厂锅炉汽水回路动态参数建立。为便于调试和分析,将Fuzzy控制器输出进行封装并将常规PID与模糊PID控制器输出信号混合见图3.

图3 系统仿真结构图
根据上述过程加入45单位的阶跃定值侧干扰,根据经验整定PID参数初始值Kp=50、Ki=0.1、Kd=25.系统仿真结果如图4所示。
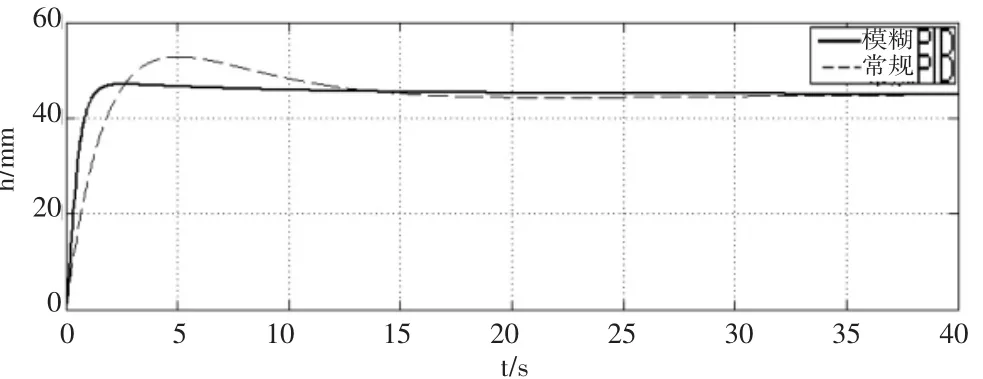
图4 系统仿真曲线图
3.2 结论分析
不同控制算法下的系统动态性能指标如表2所示。
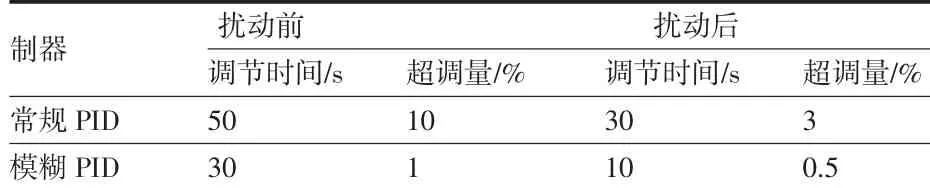
表2 性能指标
从两种控制器的仿真曲线对比可以看出,模糊PID较之常规PID在锅炉汽包液位控制中动静态指标明显提升,表现在响应迅速快,调节时间短,超调量比较小,使系统具有更好的动态性能和调节性能,增强了系统的鲁棒性,对实际应用具有重要的借鉴意义。
[1]郑志明.锅炉汽包水位仪表的应用分析[J].仪表技术,2012(02):46-47,53.
[2]李文涛,刘丽霞.模糊PID算法在锅炉汽包水位控制中的应用[J].包钢科技,2010(01):50-53.
[3]石辛民,郝整清.模糊控制及其Matlab仿真[M].4版.北京:清华大学出版社,2008.
[4]李晶.锅炉汽包水位模糊自适应控制及仿真[D].南京:南京理工大学,2015.
[5]王述彦,师宇,冯忠绪.基于模糊PID控制器的控制方法研究[J].机械科学与技术,2011(01):166-172.
Study on Application of Boiler Drum Water Level Control Based on Fuzzy PID
WU Peng-bin,LI Bin,BAI Yong,QIN Ting
(Department of Physics,Changji University,Changji Xinjiang 831100,China)
By analyzing the causes of disturbance of boiler liquid level,fuzzy inference mechanism is introduced on the basis of conventional PID control.With the help of simulation software,the control system is set up,and the PID control parameters are set up according to the working conditions of the field,and the control simulation curves are obtained.The results show that the dynamic and static indexes are improved,and the control quality is improved.Conclusion it has certain reference value for practical application.
boiler drum water;fuzzy PID;simulation;parameter optimization
TP273
A
1672-545X(2017)06-0202-03
2017-03-03
2016年新疆维吾尔自治区大学生创新创业训练计划项目(项目编号:201610997006);昌吉学院教学研究项目(项目编号:16jyyb005)
吴鹏彬(1994-),男,新疆伊犁人,本科,研究方向:能源与动力工程;李斌(1982-),男,新疆昌吉人,硕士,实验员,主要从事自动化技术应用及仿真教学和研究。
