自动扶梯导轨系统装配夹具设计
2017-07-31薛焕樟
薛焕樟
(肇庆市技师学院,广东肇庆526060)
自动扶梯导轨系统装配夹具设计
薛焕樟
(肇庆市技师学院,广东肇庆526060)
通过对现有导轨系统装配工位的工艺路线与实际操作进行研究,找出装配过程中的不足之处,提炼提出扶梯梯级运行导轨系统的装配夹具的需求,对在产的扶梯导轨系统装配工艺进行详细分析,确定可行的设计方案。在夹具设计过程中考虑扶梯产品系列化的需求,对该装配夹具的适用性提出要求,满足产品变化、中小批量生产的需要。该夹具定位精度高,夹紧可靠;结构刚性好;操作方便、灵活,减低装配操作过程中重复出现的定位、测量操作,降低操作工时,提高效率,改善了装配工作;适用性好,可根据扶梯倾斜角度不同变化进行调整,满足产品变化时的需求。
装配夹具;自动扶梯装配;导轨系统
1 设计需求
装配夹具是在装配过程中使用的、用于给装配件准确定位、可靠地夹紧工件的辅助工装工具。为适应市场的激烈竞争,现代制造行业需要不断地提升生产效率,降低成本,并且要保证产品质量。这就要求装配夹具能够在工序范围内保证装配的精度要求和装配质量;缩短装配辅助时间的基础上提升装配效率,降低工时成本,且减低操作工人的劳动强度,改善工作条件。因此,合理地设计并运用装配夹具,能够有效地改善生产,有利于提升企业的竞争力。
自动扶梯是一种依靠移动的梯级与移动的扶手带来输送人流的交通工具。自动扶梯机械结构复杂,组成零件有3000多个;导轨系统是自动扶梯中执行部件梯级的运行部件,梯级在导轨系统中运行,形成一个运动的、循环的梯级系统[1]。扶梯导轨结构如图1所示。
目前中大型扶梯厂商年产量在4 000台左右,多属于中批量的生产,并且所接的订单标准化程度不高,客户个性化定制要求也较多,推行自动化装配经济效益不高,使用专用的、适用性较高的装配夹具是较为经济可行的选择。某公司原来仅靠操作工人反复操作、调整和测量来保证装配精度,导致装配精度较低,操作调整的辅助时间较长,使得工时成本大,为了解决生产中存在的这个问题,迫切需要有一套高效、高精度、低成本装配夹具。
2 装配工艺分析
2.1 导轨系统分析
以上平层导轨系统为例进行分析,如图2所示,导轨系统按照功能进行划分,主要由三部分组成:(1)运行导轨,此部分是梯级及梯级链的运行轨迹,要求严格保证装配精度在0.5 mm以内;(2)压轨以及防跳轨,用于防止梯级运行过程中跳动;(3)支撑部分,用于连接导轨与扶梯的桁架。
如图3和4所示,要想将导轨在三维空间上定位,需要在X、Y、Z三维方向给予约束。根据几何原理,X、Y方向的定位可以通过确定导轨相对于平层基准面的距离a以及导轨相对于倾斜段基准面的距离b来确定;Z方向的定位可以通过确定导轨相对中心基准面的距离c来确定。对于扶梯产品而言,不同半径、不同位置的导轨相对于平层基准面的距离a值与相对于倾斜段基准面的距离b值是不同的;不同梯级宽度条件下的导轨相对于中心基准面的距离c值不同,梯级宽度有600、800、100 0这三种规格[2]。在实际装配操作过程中,工人就是通过确定每一根导轨相对于三个基准面的距离a,b,c的值来给导轨定位的。为保证扶梯运行平稳可靠,导轨系统的装配精度很高,手工操作定位的方法难以严格保证装配的质量,显然定位操作将消耗大量的操作工时。
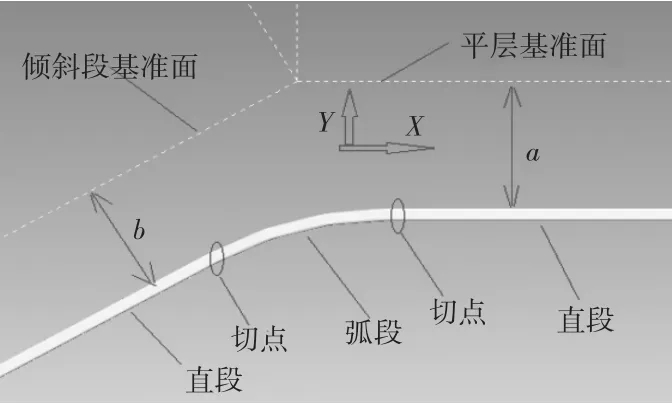
图3 导轨在X、Y坐标方向的定位

图4 导轨在Z坐标方向的定位
2.2 无夹具的装配工艺
在没有使用装配夹具情况下,导轨系统装配通过拉线的定位的方式进行。其工艺路线如下:桁架预装→画工作点(定基准点)→拉定位线、拉中线→预装导轨支架→导轨支架定位→装导轨→确定并测量每根导轨相对三个基准面的距离/调整→紧固。在这种装配工艺中,为保证每根导轨的装配精度,经常需要多次的测量和调整操作。
3 装配工艺的改进方案
为改善装配效率,降低定位操作工时,考虑引入装配夹具来辅助装配操作。使用装配夹具条件下导轨系统装配拟定的工艺方案如下:桁架预装→画工作点(定基准点)→上装配夹具→定位导轨→装支架并紧固。在新的装配工艺方案下,首先取消基准线,减少了拉线操作工时。装配开始前,只需确定基准点,并以基准点为准,将装配夹具调整、装好,然后用夹具来给各导轨定位、夹紧;只要将装配夹具装好,导轨就可以用夹具定好位,减少了装配导轨时多次的定位、测量、调整操作。另一方面,与之前的先装导轨支架后装导轨的方式不同,新的装配工艺方案是先用夹具来给导轨定好位,并且夹紧固定,再来连接紧固导轨、导轨支架、桁架这三个部件,将导轨支架当成是紧固件来安装,这样可以减少定位的操作,也避免因导轨支架原尺寸上和装配后的误差造成的导轨装配后的误差。
4 装配夹具总体设计方案[3-7]
方案采用空间三坐标移动功能来实现。由于夹具部件仅在调整阶段移动,不需要频繁运动,夹具部件要求在空间三个坐标方向实现移动,因此考虑采用简单的滑动移动运动副实现,如图5所示。
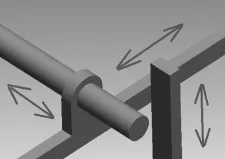
图5 运动副实现空间三坐标方向移动
(1)定位方式:X、Y方向的定位由于不同导轨的位置不同,考虑采用定位件来确定导轨位置。Z方向的定位,由于梯级宽度上的规格只有600、800、100 0三种,考虑将Z方向的定位设计成能快速调整的结构,Z方向上左右各三个刻度,对应有一个简单的固定机构,装配不同梯级宽度导轨系统时根据需要快速移动到相应位置,并且可以左右移动,例如先移动到左边对导轨进行定位,装好左侧导轨,然后再移动到右边装右侧的导轨,这样可以既简单快捷,也简化夹具的结构。X、Y坐标方向定位如图6所示。
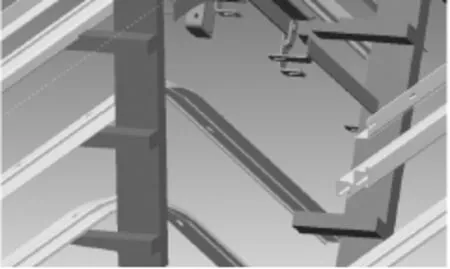
图6 X、Y坐标方向定位
(2)夹具安装的支撑方式:夹具用四个点支撑,安装在桁架上。四个支撑点能进行高低的调整。夹具安装在桁架上如图7所示。
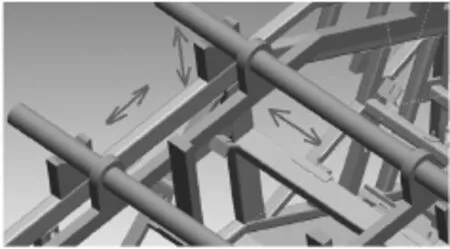
图7 夹具安装在桁架上
(3)夹紧方式与夹紧结构:夹紧方式选用肘节式快速夹紧装置,这类夹紧装置结构简单、安装简便、被夹紧工件装卸快捷、操作方便、快捷高效,并且这种夹紧装置商品化程度高,可以很容易在市场上买到。夹紧支撑根据导轨形状进行特殊设计。肘节式快速夹紧装置和夹紧支撑机构如图8所示。
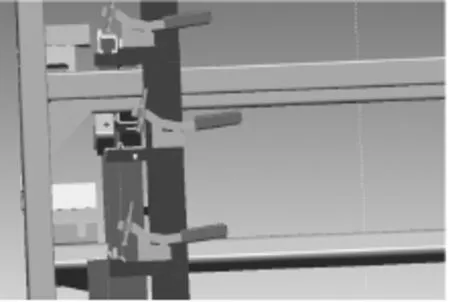
图8 肘节式快速夹紧装置和夹紧支撑机构
(4)总体结构布局。如图9所示,装配夹具通过四个支撑安装在桁架上,横梁沿Z轴方向左右移动,导轨的定位通过平层位置上的夹具部分和倾斜段部分的夹具来实现。
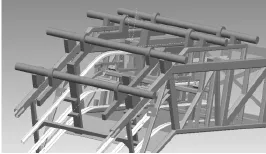
图9 总体结构布局
最终完成的导轨系统夹具如图10所示。夹具分成两部分:平层位置定位部分和倾斜段位置定位部分。装配时,按照所定位导轨在平层位置以及斜段位置上相对于基准面的距离,调整好定位夹紧机构;在画好工作基准点之后,分别将夹具的两部分安装在桁架上,以工作基准点为准,调整好,然后将需要安装的导轨放到夹具上定好位、夹紧,即可完成导轨的定位,图10中1为平层位置定位部分;2为倾斜段位置定位部分。
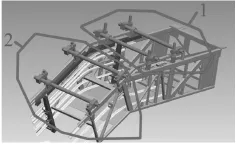
图10 导轨系统装配夹具
5 结束语
本文设计了一种自动扶梯导轨系统装配夹具,完成后的装配夹具,在装配车间进行了试用。根据修改后的装配工艺方案执行,并且使用了该装配夹具进行辅助装配。试装后的导轨都能满足装配精度要求,导轨系统的装配工时由原来的41 h的工时减少为25 h,导轨系统装配站的节拍时间由原来的6.5 h减少为3 h,效率有明显的提高,但还存在夹具调整的时间比较多的问题。该装配夹具对非标量比较大、不经常做的公交型扶梯效果比较很明显。夹具具有的其它优势有:
(1)能实现导轨在空间三维坐标方向的定位,并且定位件能够符合要求,在三个坐标方向移动。
(2)定位准确,定位精度足够高,保证导轨系统整体装配后的精度。
(3)夹紧可靠,能快捷地夹紧导轨。夹紧方式合适,夹紧力适中,由于有两个轨迹线上的导轨厚度为3 mm的扁轨,刚性较差,夹具也能保证夹紧导轨不产生变形。
(4)夹具能保证在承受导轨重量情况下,变形符合精度要求。
(5)夹具零件容易加工、制造成本低。
(6)夹具的重量轻,便于装配现场操作。
(7)适用性好,能够满足各种倾斜角度、导轨半径、梯级宽度条件下导轨系统的定位,要求装配夹具在装配对象规格发生变化时,不需要或者只需经过简单调整,即可满足需求。
[1]张元培.电梯与自动扶梯的安装维修[M].北京:中国电力出版社,2006.
[2]中华人民共和国国家质量监督检验检疫总局,中国国家标准化管理委员会.GB16899-2011自动扶梯和自动人行道安装安全规范[S].北京:中国标准出版社,2011.
[3]谢旭华,张洪涛.机械制造工艺及工装[M].北京:科学出版社,2008.
[4]朱耀祥,浦林祥.现代夹具设计手册[M].北京:机械工业出版社,2009.
[5]成大先.机械设计手册[M].北京:化学工业出版社,2008.
[6]王西来,陈燎原,艾子建.装配夹具的设计与应用[J].工具技术,2008,42(12):64-65.
[7]鲍习银,汪张翼.自动扶梯托滚轮定位分析及装配夹具设计[J].机械工程师,2012(6):194-195.
Design of Assembly Fixture for Escalator Guide Rail System
XUE Huan-zhang
(Zhaoqing Technician Institute,Zhaoqing Guangdong 526060,China)
Through the research on the existent process route and the actual operation of the rail assembly position,the paper points out the defects in the assembly process and improves the requirements of the assembly fixture for the escalator cascade operation guide system.According to the existent detail of the assembly process of the escalator rail system,a feasible design scheme has been yielded.In the process of fixture design,in the requirements of the product seriating of the escalator,the applicability of the assembly fixture is put forward to meet the needs of product change,small and medium batch production.The fixture has high performances in positioning accuracy,reliable clamping,structural rigidity,operation convenient,flexible to reduce the position and measurement operation in the process of assembly operation.And also the fixture can reduce the operation hours,improve the efficiency and quality of the assembly work.Eventually the fixture has the applicability in the adjustability.It can be easily adjust to meet the needs of different tilt angle of the escalator.
assembly fixture;escalator assembly;guide rail system
TG754
A
1672-545X(2017)06-0081-03
2017-03-08
薛焕樟(1984-),男,广东潮州人,讲师,硕士,研究方向:机电自动控制和汽车动力传动研究。
