一种便携站天线伺服系统设计
2017-07-25齐晓娜中华通信系统有限责任公司河北分公司河北石家庄050081
齐晓娜(中华通信系统有限责任公司河北分公司,河北 石家庄 050081)
一种便携站天线伺服系统设计
齐晓娜
(中华通信系统有限责任公司河北分公司,河北 石家庄 050081)
介绍一种便携站天线伺服系统,利用一体化设计理念使得伺服系统体积小、重量轻。同时辅助以多项软件算法如角度标校、航向校正,使得对星过程简单、高效。便携站天线可单人背负,应用于抗震救灾、应急通信等方面具有较大优势。
一体化设计;一键寻星;角度标效;航向校正
0 引言
随着科技的发展和应急通信设备的需求,便携站天线[1]的设计逐渐以一体化设计、智能化设计做为设计理念,以便于携带及操作简单。通过介绍伺服系统设计原理,本文论述了一种便携站天线伺服系统设计。
1 便携站天线基本组成
该天线座架在结构上采用一体化设计,重量轻,外型美观。伺服和结构一体化设计,伺服尽量选用体积小,重量轻的元器件,并且驱动与电机采用整体—体化设计;伺服控制跟踪盒安装在天线底箱里,这样无需单独的伺服控制机箱以及相应的控制电缆,整个天线外型简洁美观。整体外观图,见图1。

图1 带箱体外观和无箱体上盖外观
该设计实现了整个对星过程的自动化和快速化。给系统加电自检完成后,只需按一下箱体上的“对星”按钮,天线便在3min内自动完成对星操作,整个过程不需人工干预。
2 伺服系统设计原理
伺服系统自动采集天线姿态信息、位置信息后,根据目标卫星经度计算出所对卫星的方位角、俯仰角。然后通过驱动控制电路控制电机,调整天线的方位角、俯仰角,完成天线目标指向功能。伺服设计原理图见图2。
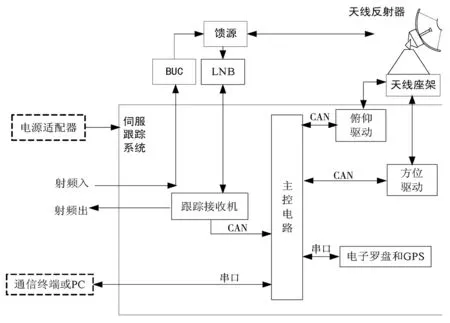
图2 伺服控制设计框图
3 硬件设计
3.1 主控板设计
主控板采用了高速单片计算机作为控制核心,主控板是伺服控制跟踪系统的核心,采用功能模块化和一体化的设计方法,实现采集罗盘、GPS、轴角、限位信息、接收信标信号以及驱动方位、俯仰电机等功能,见图3所示。
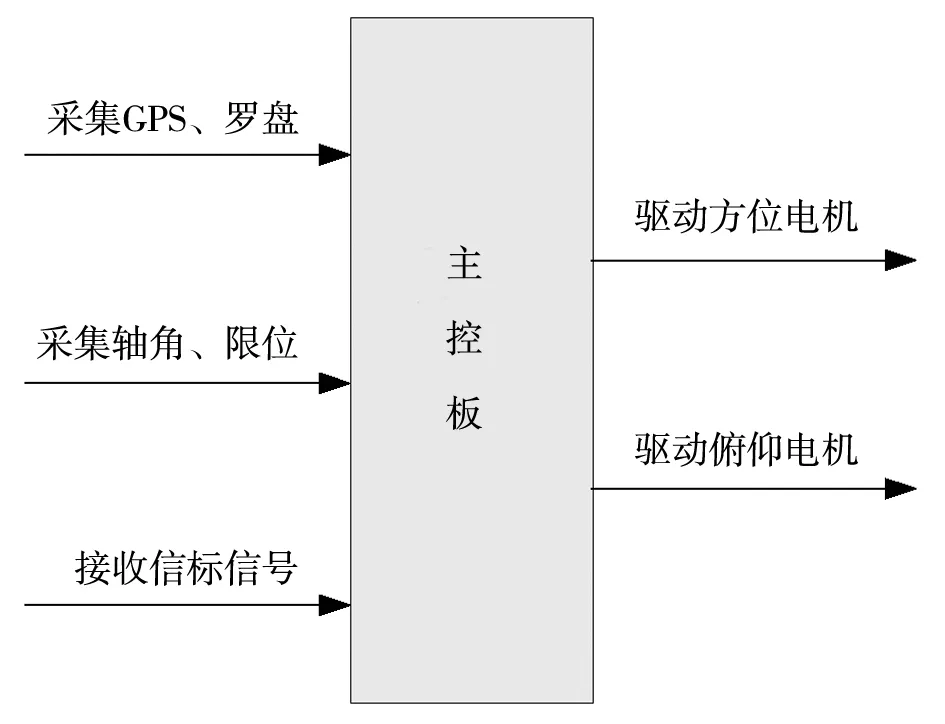
图3 主控板信息流
3.2 步进电机驱动控制
天线方位、俯仰驱动采用步进电机,考虑到体积小型化、控制简单可靠、功耗情况和供电形式选用小型一体化步进电机。驱动与电机采用整体—体化设计,带12bit码盘反馈。具有CAN接口,与主控板全数字交互数据,有效提高了控制精度,简化了控制电路。
3.3 电子罗盘和GPS的选取
目前,市场上定向定位产品基本为惯导[2]、寻北仪、电子罗盘、GPS /北斗、双GPS/北斗等产品,本文选取了电子罗盘加GPS方式,理由如下:
惯导、寻北仪定向精度高,不受天气、昼夜、地磁场和场地通视条件的影响,但是价位高、体积大,不适用于便携站天线系统中。
双GPS/北斗,可以出定位定向信息,但GPS天线安装受限,基线长度决定定向的精度。越长精度越高。本系统由于便携要求外形尺寸较小,无法提供长基线,故未采用。
电子罗盘是利用地磁场来定北极的一种方法,成本低、体积小、定向精度较高(0.5°)。但是受地磁环境以外产生的磁场影响较大。只能作为获取大致航向,再通过伺服系统扇扫来锁定目标,该系统采用的为Honeywell生产的HMR3000。
GPS/北斗是通过卫星定位,GPS与北斗信号可自由切换,其体积小、重量轻、功耗低,所以本系统采用GPS+电子罗盘的形式来定位定向。此种方式已经在大量的工程中成功应用。
3.4 跟踪接收机模块
天线接收到的频段信号经LNB放大变频后输出一路给跟踪接收机进行解调跟踪,与伺服控制一体化设计,该模块集成至伺服系统中。
4 软件设计
4.1 软件流程
伺服控制软件运行在主控板上。实现数据采集和运动控制。
系统上电后,首先初始化,然后自动采集限位、定位定向以及故障等信息,等待系统命令。一旦收到一键寻星命令,系统进行星位计算,马上驱动天线转到理论计算的方位角、俯仰角,此时如果跟踪接收机不能锁定,立即进入快速扇扫步骤,跟踪接收机锁定后自动运行旁瓣识别程序,确认主瓣后进入快速跟踪程序,直到跟踪到信号最强,“锁定”指示灯变亮,对星完成。为了实现一键寻星,在软件中采用了多项算法,实现了整个对星过程的自动化和快速化。
4.2 软件中采用的关键技术
本文就软件中多项算法中的角度标效、航向校正技术介绍如下:
a) 角度标效
本系统中使用的12bit码盘反馈为增量式。为防止角度有误,每次上电需要将角度校准。系统中安装标效开关,或者限位开关也可当作标效开关使用。系统出厂前置入标校开关角度信息,系统上电后,自动标效角度。
b) 航向校正
电子罗盘容易受磁场影响,如果磁场环境较差,电子罗盘提供的姿态信息偏差就较大,计算的目标角度偏差就较大,这样造成对星时间较长。如果在天线扇扫范围内,有同频点的卫星,还有可能对星失败。为了避免该问题,伺服控制软件中采用了航向校正技术。
航向校正技术:天线本次使用中,首次对星,依据工程经验对准一颗稳定的卫星,进而反向计算系统本身的姿态信息。而后转到目标卫星,伺服控制软件计算的理论位置基本就是该卫星的中心位置, 实现了对星的准确性,提高了对星速度。
5 结束语
本文设计了一种便携站天线伺服系统。本系统采用一体化、智能化设计。在系统中应用了大量整体—体化设计理念使得整个系统体积小、重量轻。同时伺服控制软件采用多项技术,降低了系统使用难度。随着卫星通信的发展,以及国家应急通信的需求日益增加,便携天线会在各个领域中发挥更大的作用。
[1] 董华,温倩,初晓军.便携式雷达天线系统测试与控制平台的设计[J].计算机测量与控制,2014,22 (3):787-789.
[2] 魏英杰.动中通地面站卫星天线伺服控制系统[J].无线电通信技术,2007,33(3):30-32,
Design of a portable antenna servo system
QI Xiao-na
(ChinaCommunicationSystemCo.,Ltd.HebeiBranch,ShijiazhuangHebei050081,China)
A portable antenna servo system is introduced.Using the integrated design concept,the system is small and lightweight.While supporting a number of software algorithms such as angle calibration,heading correction,made the aiming process simple and efficient.Portable antenna can be single bear,used in earthquake relief,emergency communications and so on.
Integrated design;A key to find stars;Angle calibration;Heading correction
2017-05-10
齐晓娜(1982- ),工程师,主要研究方向为天线伺服控制.
1001-9383(2017)02-0038-04
TN927
A