无线体感仿生机械手
2017-07-20孟令达方俊杰周雨
孟令达++方俊杰++周雨

摘 要:针对市场需求,文中设计了一款由仿生机械结构和传感器组成的机械手。该机械手可应用于排爆机器人,危险实验等领域,可有力保障作业人员的人身安全,具有良好的社会效益与广闊的应用前景。
关键词:仿生;机械手;传感器
1 作品简介
该机械手由仿生机械结构手及传感器手套组成,采用模块化的设计理念进行设计。传感器手套由手套,传感器模块,控制模块,通信模块组成,具体如图1所示。
1.1 传感器手套工作原理及图示
控制模块采用Arduino Nano控制板,其处理器采用高性能低功耗的AtmelAVR ATmega328芯片。
通信模块采用nRF24l01模块。Arduino Nano控制板及nRF24l01无线通信模块如图2所示。
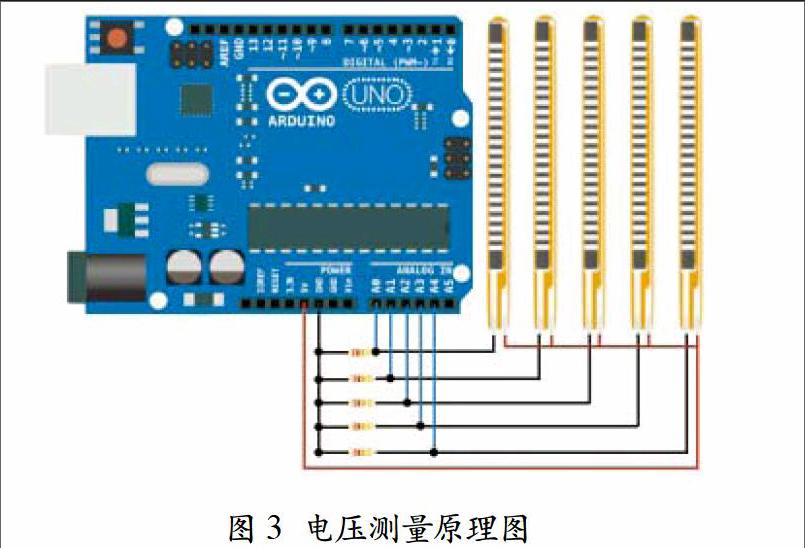
传感器模块由flex 4.5英寸弯曲传感器和22 kΩ固定电阻构成,弯曲传感器在弯曲时其电阻变大,弯曲传感器接22 kΩ固定电阻,传感器和电阻间接5 V电压,控制模块测量固定电阻的电压变化,将其电压变化的数据处理变为舵机转动的角度数据,后通过无线模块发送给机械手部分,使之完成相应动作。电压测量原理图如图3所示。
1.2 仿生机械结构手设计原理及图示
仿生机械结构手部分由机械模块,动力模块,单片机模块,通信模块组成。
机械模块模仿人手关节,3D打印技术打印拼装完成,理论上可以完成所有人手的动作。该部分共40个部件,每根手指有三个关节,手指可绕关节自由转动。机械手各部件如图4所示。组装好的机械手如图5所示。
动力模块由五个SG90舵机构成,舵机转动拉动线运动,从而带动机械手各手指运动。每个舵机柄上连接两根线,这两根线分别连接在手指两侧,通过两根线的运动带动手指弯曲和张开。手指转动原理如图6所示。机械手动力模块如图7所示。
图4 机械手部件
图5 组装好的机械手
图6 手指转动原理
图7 机械手动力模块
通信模块采用nRF24l01模块,其有效连接范围约为100m。传感器手套的通信模块相连接,接受传感器手套传来的数据。
通信模块接收数据后传递给控制板,控制板按照接收的数据控制舵机所转动的角度,从而带动手指转动,让机械手完成各种动作。
2 创新点
(1)该机械手使用仿生原理,模仿人手的骨骼架构,可以很好的完成人手的动作。
(2)将手指的弯曲程度通过传感器电阻的变化处理为可被单片机捕捉的电信号,将手指的动作转化为数据,将具体的动作数字化,实现人和机器真正的交融。
(3)该机械手摒弃传统机械手程序控制或者按键控制这些不方便的控制方式,利用体感方式极大地提高了机械手的精确度和可操控性,机械手完全同步人手的动作,通过人手的动作随心所欲控制机械手的动作,简化控制。使用该机械手的人员无需培训即可使用,为从事危险工作或者接触危险品工作人员的安全提供保障。
(4)该机械手和传感器手套通过无线模块连接,其有效连接范围约百米,简化了线材的使用,人可远距离无线操控机械手。
(5)将电子电路、单片机和机械机构巧妙结合,运用于解决与人类活动相关的执行操作。机械手成本低,却可以达到较高的精确度。
3 市场前景
该机械手应用广泛,可大量应用于危险工作的场景。
(1)可用于排爆机器人。将该机械手装置于排爆机器人,人可远程通过手部动作操控机械手进行爆炸物的拆除,通过体感方式大大增加了可操控性及精确性,同时还降低了机械手使用的难度,数据也可通过无线方式传输,人在安全区域操作,最大程度保障拆弹人员的安全。
(2)应用于危险实验场景。人可以通过体感方式操控机械手来做一些危险的实验,无需直接接触危险品,大大降低了危险化学实验的危险性。
(3)应用于潜艇的机械臂及机械手。使用高强度材料打造机械手,可应用于深海潜艇作业,人通过体感方式直接操控机械手,大大增加了机械手的灵活性和可操控性,更降低了海底作业的难度。
该机械手制作成本低,用途广泛,使用方法简单,弥补了当前社会上机械手不易操控,精确性低等缺点。若能批量生产投放相应市场,必能产生巨大的经济利益。
