基于扩张状态观测器的滚转通道自动驾驶仪设计
2017-07-20王文丽王黎
王文丽++王黎
摘 要:在导弹飞行过程中,滚转通道自动驾驶仪主要用于抑制弹体诱导滚转力矩产生的干扰,对弹体伪滚转角或滚转角速度进行稳定控制。由于一般战术导弹诱导滚转力矩系数较小,根据风洞试验或CFD计算得到的诱导滚转力矩系数存在较大误差,无法准确建模,导弹在实际飞行过程中,较大的诱导滚转力矩将对弹体滚转稳定控制造成较大影响,甚至导致弹体滚转通道发散。文中提出了一种基于扩张状态观测器的滚转通道自动驾驶仪设计方法,可以在导弹飞行过程中对滚转通道干扰进行实时估计,并在滚转舵偏中对滚转诱导力矩进行补偿,改善了弹体滚转通道的稳定控制性能。
关键词:扩张状态观测器;滚转通道;自动驾驶仪;稳定控制
中图分类号:TP39;TJ765 文献标识码:A 文章编号:2095-1302(2017)07-00-02
4 结 语
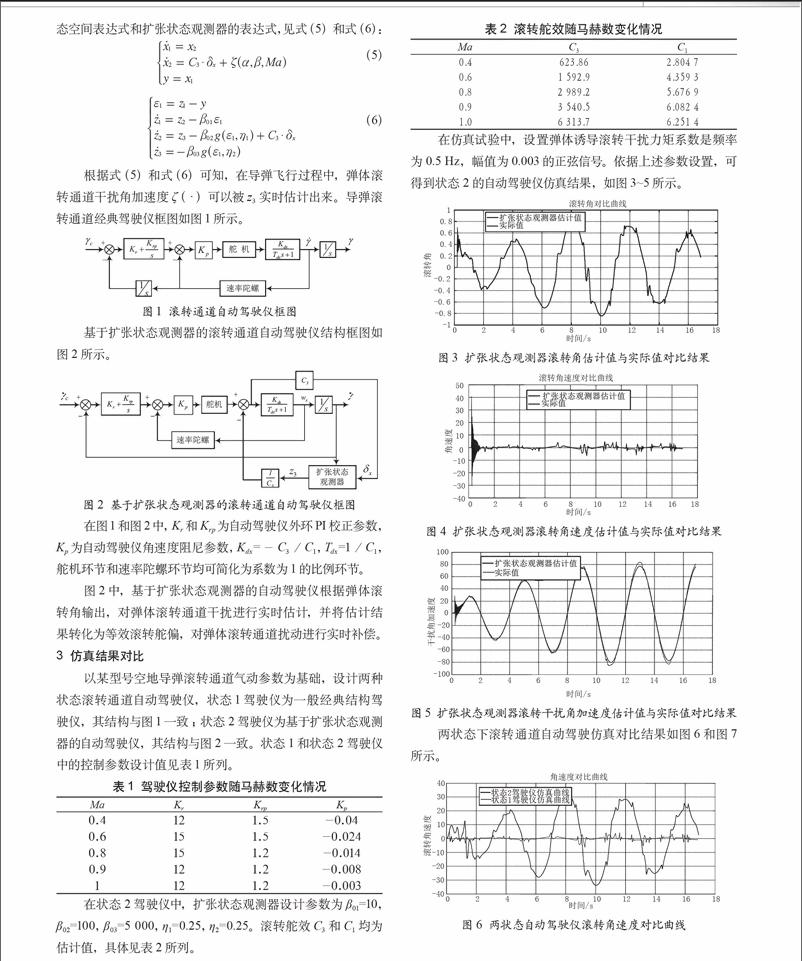
仿真分析表明扩张状态观测器能较好地对滚转角、滚转角速度和滚转角加速度进行估计,收敛速度快,精度较高。
在弹体诱导滚转力矩干扰存在时,基于扩张状态观测器的自动驾驶仪的滚转角速度和滚转角收敛速度快于經典自动驾驶仪仿真结果。
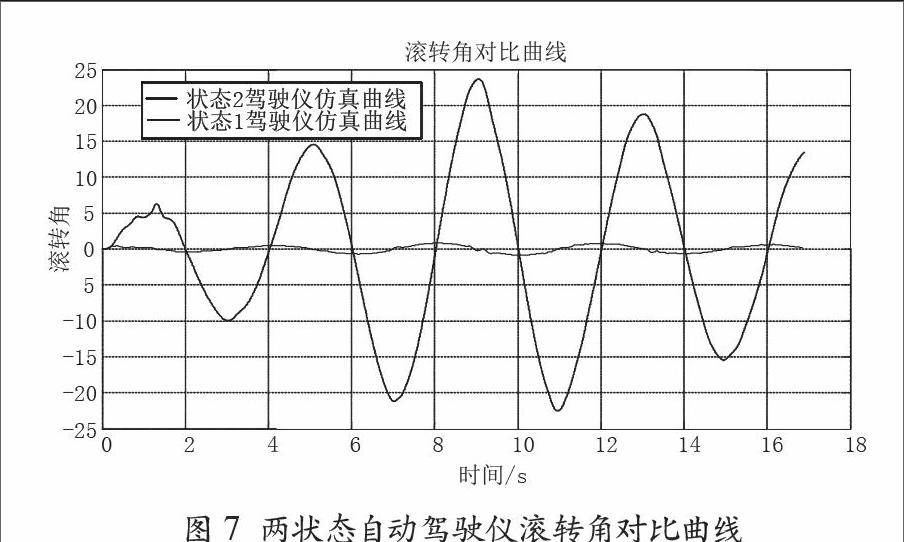
基于扩张状态观测器的自动驾驶仪能较好地抑制弹体诱导滚转力矩干扰,在此驾驶仪状态下仿真得到的滚转角速度振荡幅值远小于经典自动驾驶仪仿真结果;同时滚转角误差控制也远小于经典自动驾驶仪仿真结果。即基于扩张观测器的滚转通道驾驶仪控制效果优于一般的经典自动驾驶仪。
参考文献
[1]钱学森,宋健.工程控制论[M].北京:科学出版社,2015.
[2]韩京清.自抗扰控制技术[J].前沿科学,2007(1):25-32.
[3]杨军,杨晨,段朝阳.现代导弹制导控制系统设计[M].北京:航空工业出版社,2005.
[4]黄一,张文革.自抗扰控制器的发展[J].控制理论与应用,2002,19(4):485-492.
[5]韩京清.从PID技术到自抗扰控制技术[J].控制工程,2002,9(13):13-18.
[6]杨军,杨晨,段朝阳.现代导弹制导控制系统设计[M].北京:航空工业出版社,2005.
[7]陈磊,刘永善.导弹滚转自动驾驶仪设计与仿真[J].重庆三峡学院学报,2012(3):72-76.
[8]李彤,张士峰,杨华波,等.基于扩张状态观测器的小型固体火箭控制系统设计与验证[J].固体火箭技术,2014(6):749-755.
