基于ROS系统的多旋翼自主飞行控制系统
2017-07-19梅武军伍家成杨扬戬郑钧溢
梅武军,伍家成,杨扬戬,郑钧溢
(1.浙江大学 台州研究院,浙江 台州 318000;2.湖南大学 电气与信息工程学院,湖南 长沙 410012)
基于ROS系统的多旋翼自主飞行控制系统
梅武军1,伍家成1,杨扬戬1,郑钧溢2
(1.浙江大学 台州研究院,浙江 台州 318000;2.湖南大学 电气与信息工程学院,湖南 长沙 410012)
在小型飞行器设计改良过程中,飞行路线和控制精度是不断突破的核心技术点。但由于环境因素的影响,会造成GPS模拟信号缺失,进而导致多旋翼无人机在自主飞行中产生航迹不稳及定位偏移的现象。文中以GPS定位改良为核心目标,构建了一个基于视觉导航的无人机中央控制系统。引入新式的Pixhawk飞行控制模块作为核心算法构架,结合定向的视觉单目机器定位算法,组成新式的双端信息定位系统,从而解决无人机在高空巡航过程中的航迹偏离和传输信息阻塞问题。将此系统嵌入飞行器ROS系统之中,构建稳固的通信网络,搭载小型低耗PC机实时运行算法系统以实现高精度、高稳定性的飞行效果和航迹控制。
多旋翼无人机;视觉定位控制;ROS系统通信网络;自主飞行与控制
近年来,无人机逐渐成为了协助实现侦察,搜寻等功能的重要工具,越来越多地引入到民用范畴中。这也使得多旋翼飞行器对俯瞰远景的拍摄、建筑拍摄和侦测探索成为使用的热点[1-2]。多旋翼无人机具备极强的负载能力,可实现垂直起落,综合稳定性极高。此外,还能实现在狭小空间内部的灵活位移,进行高精度的航迹控制,成为当下协助完成各种侦测任务的首选设备。然而,现有几种型号的多旋翼飞行器,均采用GPS进行定位和导航来实现远程操控。在复杂地形与特殊环境下,GPS信号会变得较差甚至丢失,导致飞行器将无法工作[3-4]。因此,本文采用全新的定视觉位系统进行位姿分析与评估,以多端信息采集完成稳定信息传输,同时匹配算法精度模块,来改善定位失常和飞行控制困难的问题[5-7]。将此系统搭载于飞行器ROS系统,辅以内嵌式微型计算机达成两机交互,从而真正实现无人机自主控制命令和航迹修正。
1 硬件系统组建
本文研究的对象为六旋翼无人飞行器,飞行控制系统需要用到的硬件材料包括:Pixhawk型飞行器控制主板(PX4)、视觉光学传感器若干、机载微型中控计算机、供电系统以及电机驱动网络等。各部件协同作业实现视觉传感信息采集和实时定位,将信息以ROS格式传送回控制板编译解读,继而对飞行器的飞行轨迹和行使路线进行精确控制[8-10]。
为此,实验小组组装了一架符合上述负载要求的六旋翼无人飞行器,并在此基础上额外装配微型中控制计算机,进行传感信息的收集处理。为了保证测试的可靠性及信息的参考价值,飞行续航设定在20 min以上。
以下对具体硬件部件进行功能搭配和说明:(1)Pixhawk飞行控制系统,作为整个系统的核心控制部件,在性能上有着严格要求。作为新式控制系统,搭载了STM32F427Cortex M4168 MHz微处理器,数据处理性能优越。此外,还额外加装了紧急失效保护的STM32F103控制器,避免各种原因导致的控制系统失效、瘫痪,进一步减少机组损失、降低风险几率;(2)采集处理组件。包括:气压测试计、速度测试计、温度传感器、风速测向及陀螺仪,结合GPS对无人机飞行状态进行立体数据的采集与处理;(3)机载微型计算机和单目视觉传感器。为配合无人机体积和质量需求,选用220 g,Inter Core i7 双核3537U型号处理器。该处理器搭载有Ubuntu 12.04LTS操作系统,配合8 GB内存和2 GHz CPU主频,可单次完成所有的数据处理工作,并维持较小的内存空间占用和数据寄存。此外,配合机器操作系统ROS以及匹配图像处理数据库OpenCV,视觉传感器选用PS3Eye,采集的图像信息为压缩体积,分辨率设定为(640×480);(4)飞行器驱动模块电池和电机选用大容量、低功耗的轻质设备,以增强无人机的续航能力和飞行灵活性。具体硬件架构配合方式,如图1所示。
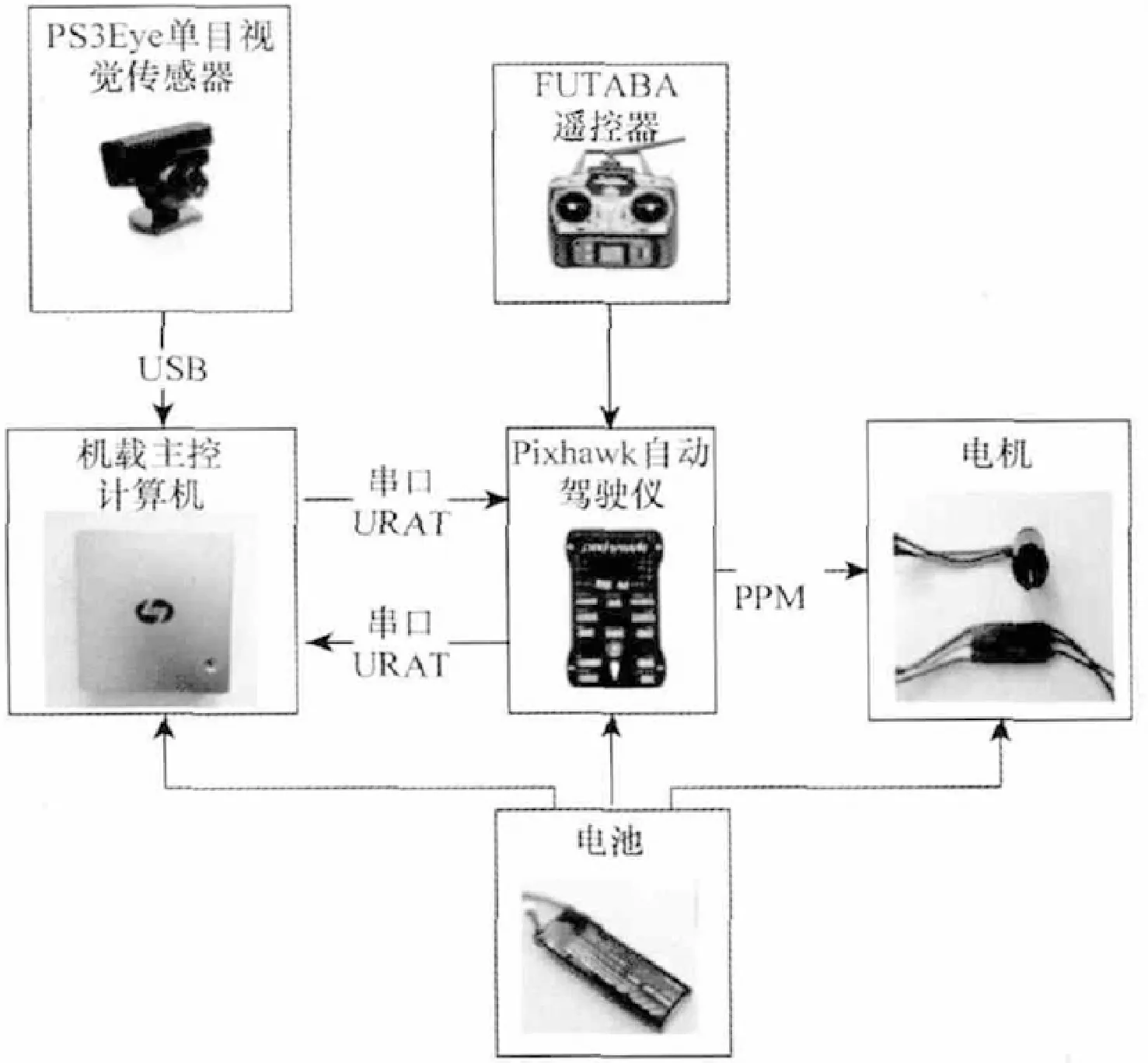
图1 系统硬件连接关系
首先由传感器采集信息输入,通过USB接口传送到中控计算机,图像数据处理分析后,将位姿整合结果发送给飞行控制板,控制板再将信息反馈回地面控制计算机。据此通过遥控设备设定飞行路线,实现位置控制[11]。
2 软件结构设计
具体给出硬件指标后,系统软件则主要负责实现各硬件模块间的信息通信和I/O转化。图2给出了整个定位导航系统的软件结构网络[12]。结构设计的核心部分在于中控计算机与PX4的节点接口设计,在此借鉴ROS操作系统的架构方式,即代码复用设计、点对点传输、分区模块化控制等方式来方便信息多通道并行传输与数据的来回通信。
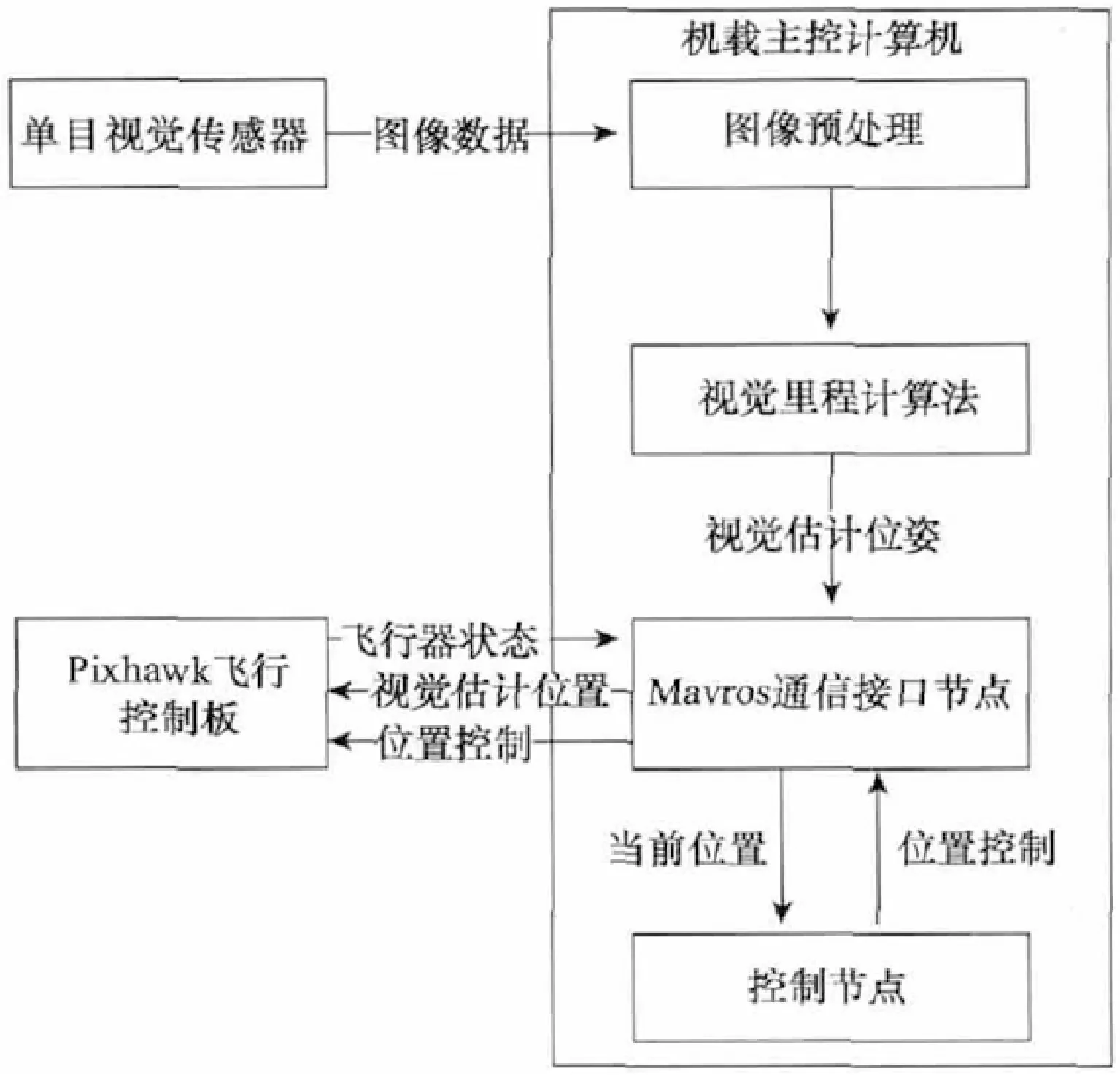
图2 视觉导航软件系统构架
2.1 通信节点及数据接口
作为地面主控计算机和机载飞行控制板间的传输枢纽以及转化接口,通信数据是获取飞行状态与控制飞行轨迹的关键。通信节点主要包含有链接协议、位姿数据包、格式转换包,并按照编码类型传送到不同的数据接收端,实现各类操作如图3所示。
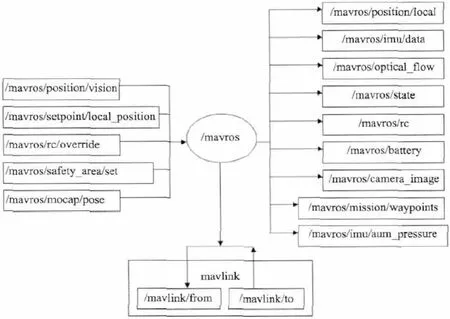
图3 通信节点数据簇结构
2.2 定位和轨迹控制
单目视觉传感器获取到的位置信息采用的是稀疏地图构建估计算法(SLAM),其主要分析坐标传输信息、局部地图跟踪与模拟还原、闭环检测3个线程的数据流。此外,利用数据传输的点对点构造出线程的单一帧对帧传送,优化了关键词和信息整合的速度,从而快速还原局部三维地图环境[13]。此类方法运算精简,结果精确度高,可满足飞行过程中的实时定位与轨迹控制需求。
3 机组系统测试分析
为检验整个机组系统实际运行效率和工作状态,甄别控制命令的执行度和流畅性,遂对接收端PX4的主控计算机收集的视觉定位数据、控制指令发送与执行两方面进行编码分析。
首先建立一个ROS下的launch文件,激活运行内核,打开多节点。输入启动文件编码
启动后,将通信节点mavros激活,设置USBO端口准入波特率,启动camera图像节点数据接收端口,开启位姿分析算法节点,初始化参数,并配置端口。整体通过ROS的数据交互和节点关系,如图4所示。

图4 数据节点和运行关系
此外,系统整体数据交互和转化的流畅性则是决定系统运行效率的重要指标[14]。以下通过对通信状态下的节点USBO数据串口实行监控,数据运行状态分析如图5所示。

图5 通信节点运行状态分析
图中分析结果可以看出,控制板节点已经连接,点对点数据通信开始,IMU数据获取发送中,参数表生成传送中,机载主机数据传输通畅。
接下来测试视觉定位系统、控制执行系统的工作状态及运行效率。主控计算机获取当前飞行器位置数据后,将控制信息反馈发送以指导无人机实行悬停、位移和起落操作。该过程中,数据信息坐标设定x/y/z三维坐标,遵循图6起降曲线和图7高度水平曲线。从测试结果可看出,水平悬停和位移坐标误差均在±0.2 m范围内,满足设计需求的控制精度[15]。
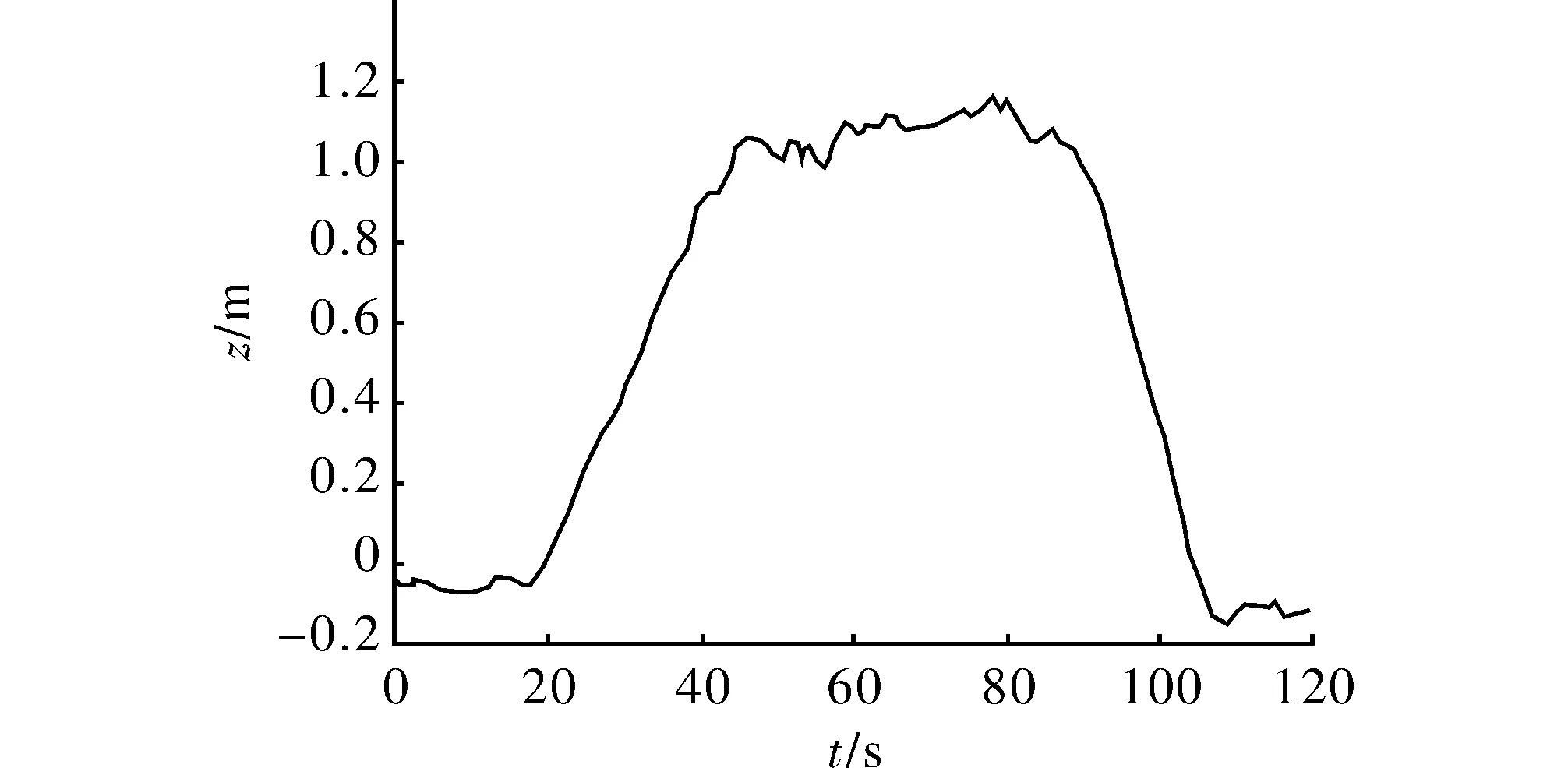
图6 高度曲线

图7 水平位置曲线
4 结束语
基于机器操作系统(ROS)搭建了完整的软硬件定位控制系统,以此实现在多旋翼无人机平台上的自主飞行控制和视觉导航。并改善原有GPS导航环境影响下可能存在的信号丢失状况,转为单目视觉定位的模拟地图构建与分析法,从而达成高能低耗的嵌入式机载无人机控制运行。机组实测结果表明:基于ROS的多旋翼飞行控制系统,通信节点通畅,数据交互迅速,具有较高的稳定性和适应性,并可完成复杂环境下的无人机侦察与自主飞行任务。
[1] 张天航,白金平.旋翼式无人机的发展和趋势[J].Artificial Intelligences & Srobotics Research,2013(2):16-23.
[2] 何伊崇,王立峰,姬生伟.基于模型参考动态逆的四旋翼机器人轨迹跟踪控制研究[J].Modelings & Simulation,2015(4):8-16.
[3] 李波.移动机器人的同步定位与地图创建研究[D].北京:北京理工大学,2015.
[4] 房雅洪.面向室内复杂环境的同步定位与地图创建系统研究[D].沈阳:沈阳理工大学,2014.
[5] 尹玉萍,刘万军,魏林.基于改进蚁群算法的多目标跟踪数据关联方法[J].计算机工程与应用,2014,50(16):16-20.
[6] 马可,郗蕴天,李慧敏.主动防护系统高速目标跟踪误差分析[J].电子科技,2016,29(4):158-160.
[7] 席志红,李永佳,段炼.基于局部特征和MeanShift的目标跟踪算法研究[J].电子科技,2015,28(6):13-16.
[8] 华承昊,窦丽华,方浩,等.SLAM中融合形状上下文和随机步进的图匹配数据关联算法[J].北京理工大学学报,2016(4):405-411.
[9] 查尤平.平滑型SLAM中数据关联的鲁棒性研究[D].北京:北京交通大学,2016.
[10] 石家兴,丁永生,郝矿荣.移动机器人同步定位的数据关联优化控制[J].计算机仿真,2015,32(9):377-381.
[11] Williams S B,Dissanayake G Durrant,Whyte H E.Towards terraided navigation for underwater robotics[J].Advanced Robotics,2001,15(5):533-550.
[12] Keller J.Navy issues urgent order to equip MQ-8 UAV helicopter with maritime surveillance radar[J].Military and Aerospace Electronics,2013,24(2):31-32.
[13] Smith R,Cheeseman P.On the representation and estimation of spatial uncertainty[J].The International Journal of Robotics Research,1986,5(4):56-68.
[14] Zhang Y,Webber R.Dynamic world modeling for a mobile robot among moving objects[J].Robotica,1996,14(5):553-560.
[15] Bachrach A,Prentice S,He R,et a1.RANGE-Robust autonomous navigation in GPS—denied environments[J].Joumal of Field Robotics,2011,28(5):644-666.
Multi Rotor Autonomous Flight Control System Based on the ROS System
MEI Wujun1,WU Jiacheng1,YANG Yangjian1,ZHENG Junyi2
(1.Taizhou Institute, Zhejiang University, Taizhou 318000, China;2.School of Electrical and Information Engineering,Hunan University,Changsha 410012,China)
In the design and improvement of the small aircraft, the flight path and the control precision are the key points of the ROS system. However, due to the impact of environmental factors, the GPS analog signal is missing, which leads to the instability of the multi rotor UAV in the autonomous flight and positioning deviation. This paper constructs a central control system of unmanned aerial vehicle based on visual navigation to improve the GPS positioning. And the new pixhawk flight control module is introduced as the core algorithm framework to form a double end positioning system of new information combined with the oriented machine vision monocular localization algorithm, so as to solve the deviation and information transmission congestion of UAV in high altitude cruising. This system is embedded in vehicle ROS system, to build a robust communication network to achieve high accuracy and high stability and flight track control by small low power PC algorithm for real-time operating systems.
multi rotor UAV; vision positioning control; ROS system communication network; autonomous flight and control
2016- 12- 14
梅武军(1984-),男,工程师。研究方向:无人机,电机控制等。
10.16180/j.cnki.issn1007-7820.2017.07.029
TP273
A
1007-7820(2017)07-106-04
