模糊PID算法的双闭环直流电机调速系统
2017-07-19王贵锋
陈 智,王贵锋
(兰州理工大学 技术工程学院,甘肃 兰州 730050)
模糊PID算法的双闭环直流电机调速系统
陈 智,王贵锋
(兰州理工大学 技术工程学院,甘肃 兰州 730050)
将模糊控制算法引入传统PID控制,对双闭环直流调速系统进行了设计和仿真。将操作人员和专家长期实践积累的经验知识用控制规则模型化,模糊推理在线辨识对象特征参数,实现了无须精确确定对象模型就可实时改变控制策略。构建了模糊控制方式的直流电动机双闭环调速系统的模型,在Matlab软件环境中进行了设计和仿真,从输出波形可以看出系统性具有明显改善。
直流双闭环调速系统;模糊控制;PID控制;Matlab仿真
直流调速广泛应用于现代电力拖动自动控制系统中,如轧钢、矿山采掘、纺织、造纸等需要高性能调速的场合。然而传统的双闭环直流电动机调速系统多数采用结构比较简单的常规PID控制技术,但在实际的拖动控制系统中,由于电机本身及拖动负载的参数(如转动惯量)并不像模型那样保持不变,而是在某些具体场合会随工况发生改变;与此同时,电机作为被控对象是非线性的,很多拖动负载含有间隙、弹性等非线性的因素[1]。因此被控制对象的参数或非线性特性发生改变,使得线性的常参数的PID控制器不能满足需要,不能保证系统在各种工况下都保持与设计一致的性能指标,导致控制系统的鲁棒性变差,尤其对那些模型参数变化范围大且具有非线性环节较强的系统。常规PID调节器难以满足精度高、响应快的控制指标,不能有效克服模型参数变化范围大及非线性因素的影响[2-3]。
本文将模糊控制算法与PID控制相结合,对双闭环直流调速系统进行了设计、仿真和性能对比。该系统不是依赖于被控制对象的精确的数学模型,而是将专家的经验及知识转化为语言控制规则,用这些控制规则去控制被控系统,能克服各种非线性因素的影响,对被控制对象的参数具有较强的鲁棒性,针对直流电动机这种参数可能发生较大变化的被控对象,采用模糊控制具有重大的研究意义。
1 双闭环直流调速系统的数学模型
当直流调速系统中含有电流环和速度环时被称为双闭环调速。直流双闭环调速系统的动态数学模型如图1所示[4]。

图1 直流双闭环调速系统的动态模型图
转速调节器使转速 跟随给定电压变化,稳态时可以减小转速误差,如果采用PI调节器,则可实现无静差。当电动机过载堵转时,会限制电枢电流的最大值,起到快速的自动保护作用。一旦故障消失,系统立即自动恢复正常,这对系统的可靠运行具有重要作用[5]。
2 模糊控制器的设计
PID控制算法对大多数过程都具有较好的控制效果和适应性[6-9],但PID参数的人工调整需要熟练的技巧。另外,即使PID参数调整良好,用同一组固定的PID参数去适应系统的全过程,当控制对象参数变化后,系统的性能也必然会受到影响。模糊控制算法可以有效且便捷地实现人的控制策略和经验,并且不需被控对象的数学模型即可实现较好的控制。将模糊控制和PID控制两者结合起来,既具有模糊控制灵活而适应性强的优点,又具有PID控制精度高的特点。
2.1 PID参数模糊自整定控制器设计
PID参数模糊自整定控制系统能在控制过程中对不确定的条件、参数、延迟和干扰等因素进行检测分析,采用模糊推理的方法实现P1D参数Kp、Ki和Kd的在线自整定。保持了常规PID控制系统的原理简单、使用方便、鲁棒性较强等特点,具有更大的灵活性、适应性、精确性[10-11]。典型的模糊自整定PID控制系统的结构系统包括1个常规PID控制器和1个模糊控制器。偏差和偏差的变化率作为模糊系统的输入,3个PID参数的变化值作为输出,根据事先确定好的模糊控制规则做出模糊推理,在线改变PID参数的值,从而实现PID参数的自整定。
2.2 PID参数模糊自整定控制器的设计
模糊控制器的两个输入参数是E和Ec,因为在模糊控制器中的3个输出参数均已经用到了微分作用,而在PID控制器中又再次使用了微分作用,这意味着微分作用过于灵敏,将会使控制效果变差。基于此种考虑可以将微分环节从上述控制器中剥离出来,不对Kd进行模糊整定。具体结构如图2所示。

图2 模糊自整定结构截图
基本论域为(-10,10),定义E,Ec模糊量的子集为{NB,NM,NS,ZO,PS,PM,PB},模糊论域为[-6,6];Kp,Ki模糊量子集为{ZO,PS,PM,PB},论域选为[0,15],考虑到对论域的覆盖程度和灵敏度,以及稳定性与鲁棒性原则等因素,各模糊子集均选用三角形隶属函数。三角形隶属度函数具有形状简单、响应灵敏、线性度好等特点[12]。
在Matlab环境下键入Fuzzy命令进入模糊逻辑工具箱,使用具有交互式图形界面的模糊推理系统编辑器和隶属函数编辑器。依照上述分析结果,选择输入、输出变量的论域范围,各个语言变量的隶属函数形状等参数。图3为编辑器界面,图4为E隶属度函数编辑界面,图5为Ec隶属度函数编辑界面,图6为Kp隶属度函数编辑界面, 图7为Ki隶属度函数编辑界面。

图3 编辑器界面截图

图4 E隶属度函数编辑界面截图
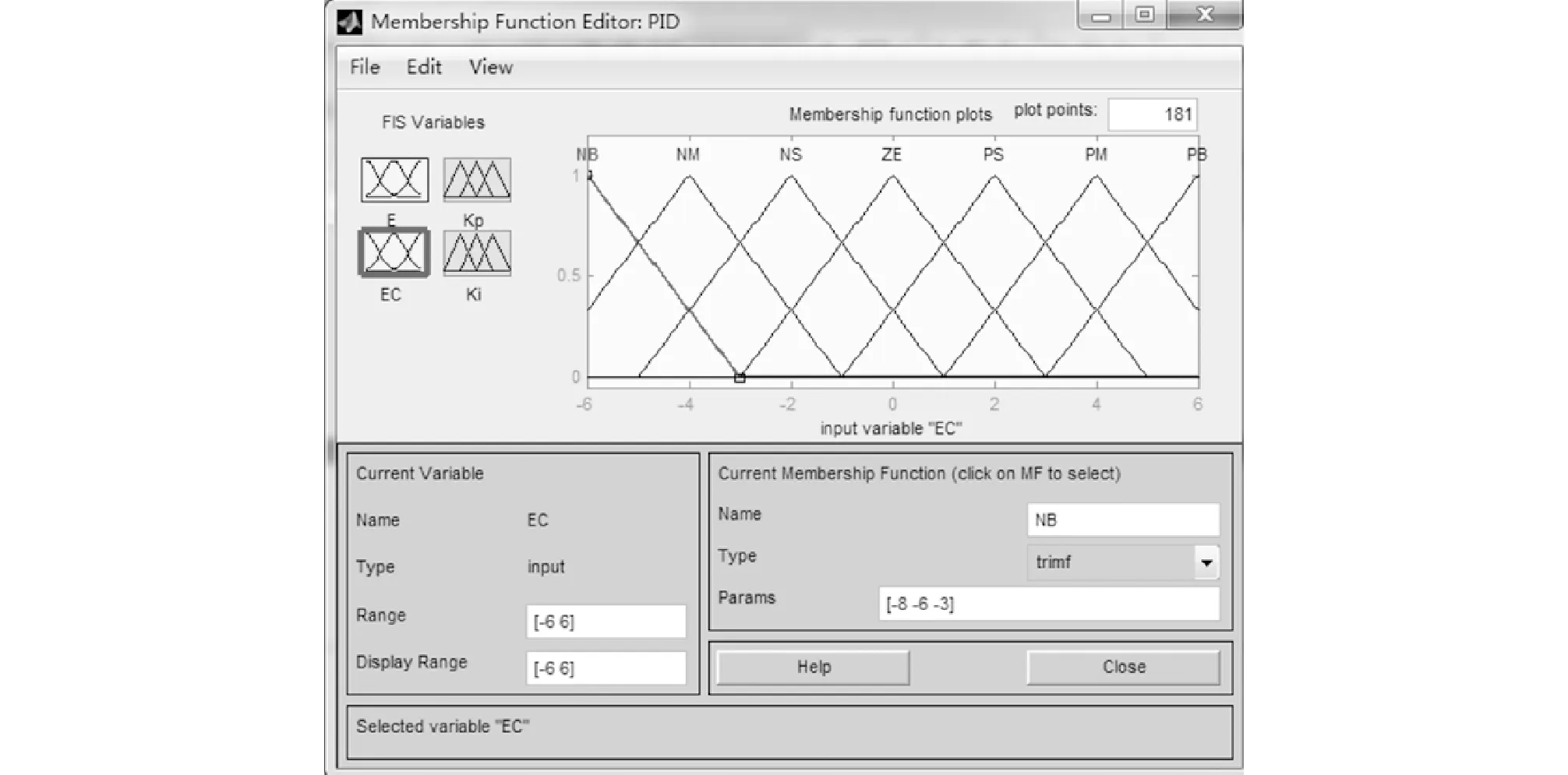
图5 Ec隶属度函数编辑界面截图

图6 Kp隶属度函数编辑界面截图
从Edit菜单中选择Rules打开模糊规则编辑器,根据对已有控制系统设计经验的总结,按照表1和表2确定“If-Then”形式的模糊控制规则,逐条输入49条控制规则。
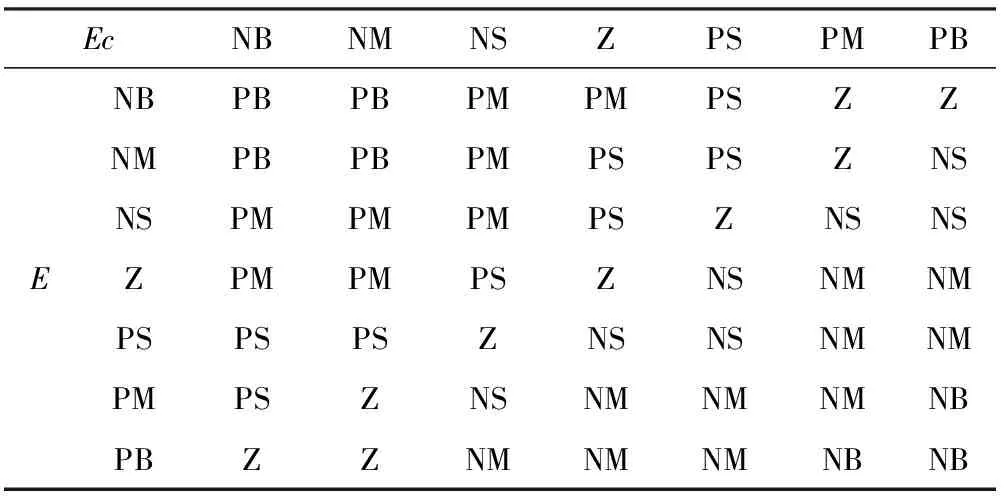
表1 Kp的模糊控制规则表
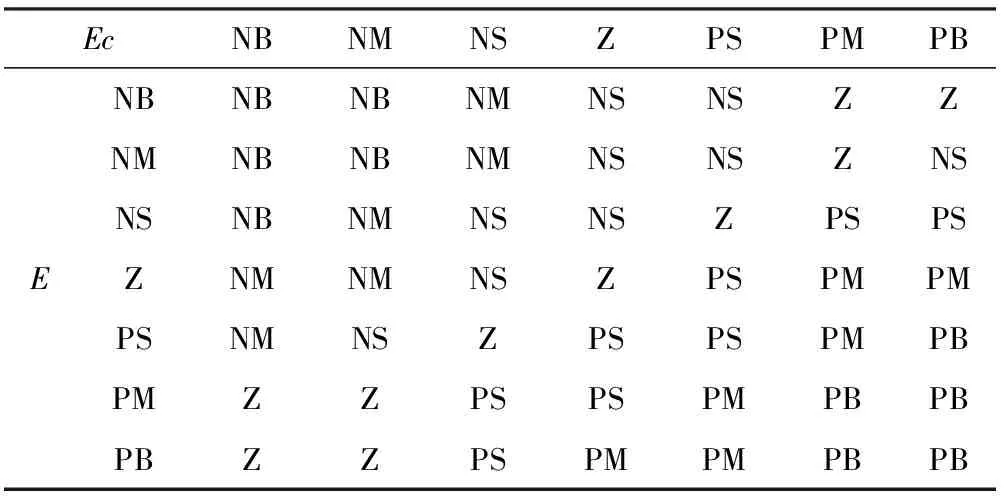
表2 的模糊控制规则表
每条规则的加权值都缺省为1,采用Mamdani推理算法和Mom去模糊化方法。利用规则查看器和表面查看器显示所涉及的模糊控制器输入量和输出量的对应关系,由此进行修改和优化[14]。规则查看器和表面查看器如图7与图8所示。
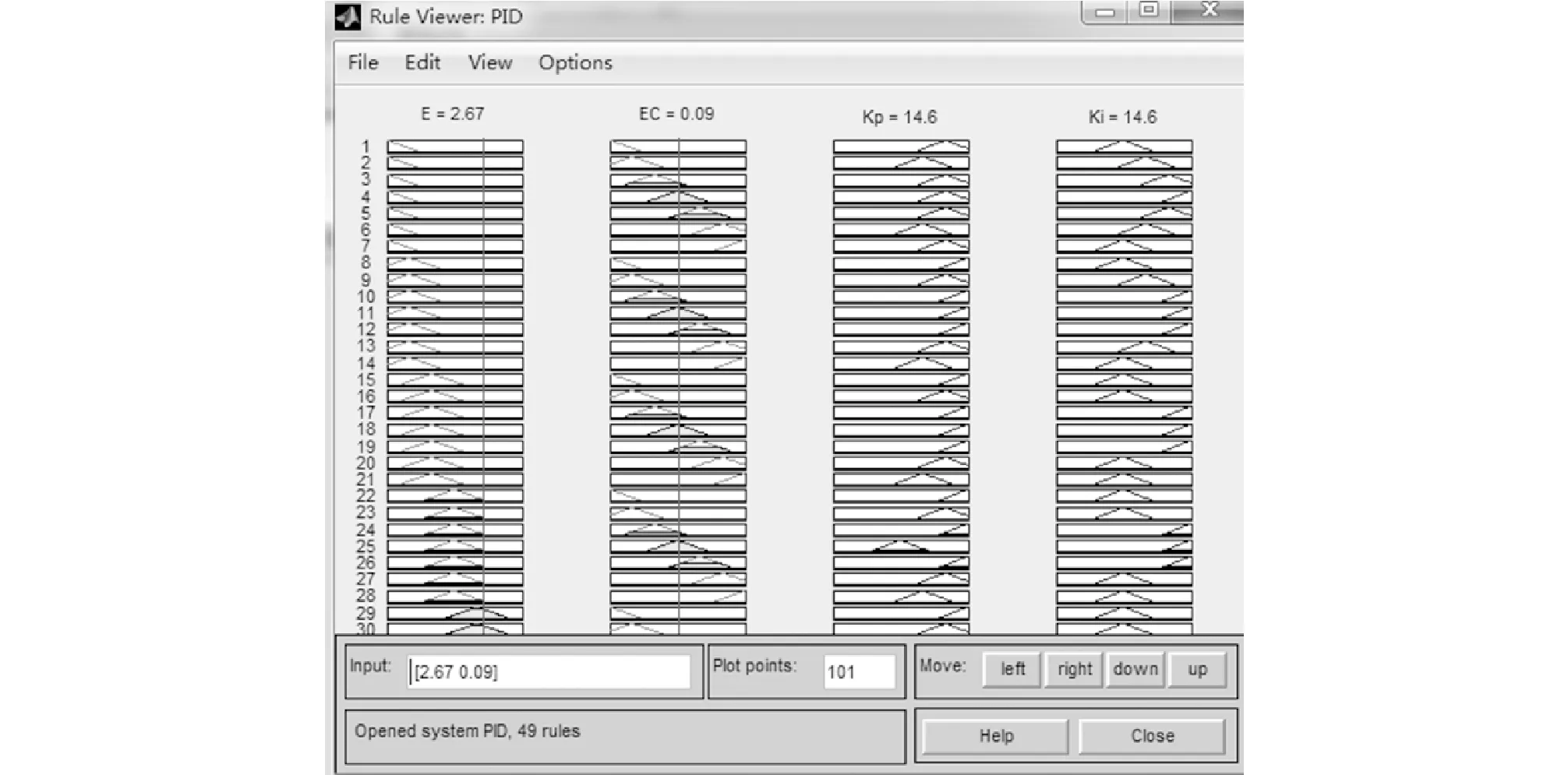
图7 规则查看器截图

图8 表面查看器截图
之后将设计好的模糊控制器保存在工作空间中,以备仿真时调用。
3 模糊控制直流双闭环系统仿真
3.1 仿真参数设置
采用仿真实验来测试模糊PID控制器的性能。在相同条件下建立传统的双闭环直流调速系统PID控制和双闭环模糊PID控制的仿真模型[14]。这里的参数引用前面传统PID仿真的参数。直流电动机的参数为:额定电压220 V,额定电流136 A,电枢回路总电阻0.5 Ω,时间常数T1=0.03 s,Tm=0.18 s。电流调节器与传统PID控制一致,只是把转速调节器换为模糊自整定控制器[15]。
3.2 在Matlab中的仿真
打开Matlab中的Simulink工具箱,根据前面的动态结构图在模型编辑窗口中建立相同的模块,再将前面设计好的调节器参数输入对应的模块中。调试运行,如果正确就会出现相适应的波形。Simulink中模糊控制的直流双闭环调速系统结构如图9所示。

图9 模糊控制的直流双闭环调速系统结构截图
3.3 仿真结果分析
将传统PID与模糊控制的仿真结果在一个示波器中显示,便于比较各种控制的优势。在各种情况下,仿真结果如下图所示。

图10 理想负载的仿真结果图
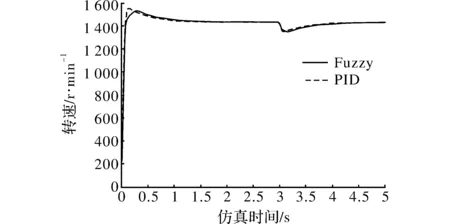
图11 负载扰动的仿真结果图
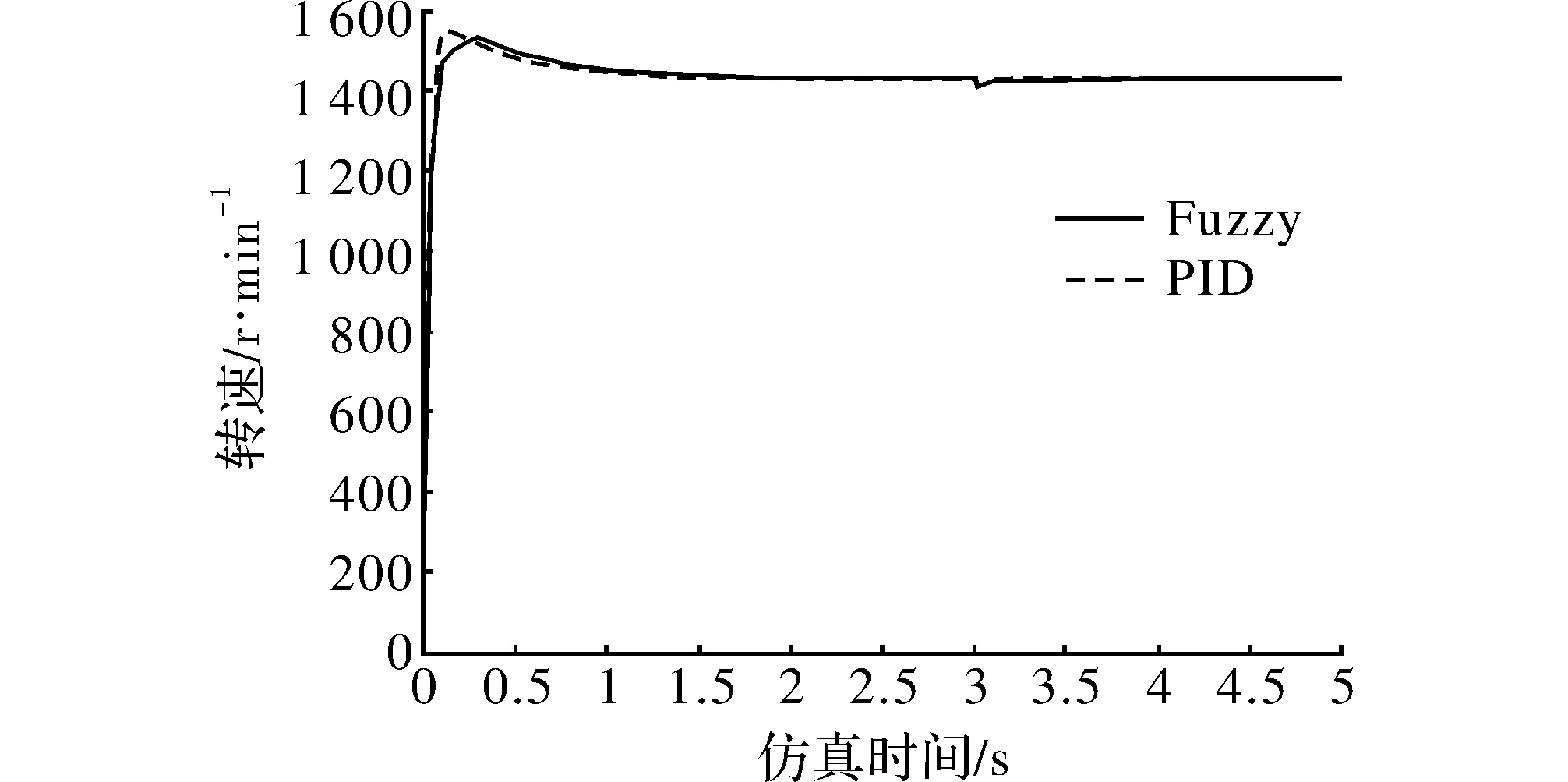
图12 电压扰动的仿真结果图

图13 电阻变化的仿真结果图
可以看出,在理想负载的情况下模糊控制的超调量比PID控制的超调要小,但是PID控制拥有更短的调节时间。在加上负载扰动的情况下,模糊控制拥有更小的转速降,但恢复时间比PID控制的时间长。在加上电压扰动的情况下,模糊控制和PID控制都拥有较小的转速降,且恢复时间都比较短。模糊控制在电阻变化的情况下,比PID控制拥有更强的调节能力、抗干扰能力、系统的适应能力。总之,模糊控制与传统PID控制比较,在理想负载下都拥有较好的调速性能,模糊控制超调量小,但调节时间长;在加扰动的情况下模糊控制拥有更好调节性和适应性,转速降更小。
4 结束语
本文将模糊算法与PID控制相结合,实现了对直流电机的双闭环调速。将前面由传统PID控制的速度环转换为模糊自整定控制。当换为模糊控制时,系统的抗干扰能力得到了加强。超调量变得更小,调节时间、上升时间都有所改善,从而使输出的转速更加稳定,减小了转速降,当系统结构发生变化时能够较好地适应新系统结构,比传统PID控制的输出稳定。
[1] 杨元祖,杨华芬.双闭环直流调速系统模糊PID控制研究[J].计算机应用技术,2011,3(28):921-923.
[2] 陆华颖,程光伟.模糊PID双闭环直流电机调速系统仿真[J].电子科技,2011,24(10):56-58.
[3] 李健,王冬青,王美丽.模糊PID设计及Matlab仿真[J].工业控制计算机,2011, 24(5):56-58.
[4] 韩璞.智能控制理论及应用[M].北京:中国电力出版社,2013.
[5] 陈伯时.电力拖动自动控制系统[M].北京:机械工业出版社,2003.
[6] 洪乃刚.电力电子、电机控制系统的建模和仿真[M].北京:机械工业出版社,2010.
[7] 董海鹰.智能控制理论与应用[M].北京:中国铁道出版社,2006.
[8] 薛花,王育飞.基于无源性的同步电机自适应滑模控制方法[J].电力自动化设备,2011,31(7):67-71.
[9] 宁海峰.参数模糊自整定PID控制器的研制[D].厦门:华侨大学,2009.
[10] 林飞,杜欣.电力电子应用技术的Matlab仿真[M].北京:中国电力出版社,2011.
[11] 杨瑞锋.基于模糊神经网络的无刷直流电机控制系统[J].人工智能及识别技术,2016,12(17):185-187.
[12] 徐奔奔,周芝峰,霍文明,等.一种双模糊PI控制器在PMSM控制系统的研究[J].电力科学与工程,2016(7):7-13.
[13] 陈金威,周晨,李智,等.智能直流电机调速系统研究[J].电子质量,2015(12):9-11.
[14] 张学阳,盛子怡,曾培煌.基于模糊参数自整定的双闭环直流电机调速系统研究[J].机电产品开发与创新,2013,26(5):112-114.
[15] 吴燕翔,张朝君,周超群,等.基于参数自整定模糊PID双闭环直流调速系统的设计仿真[J].化工自动化及仪表,2013,40(2):136-139.
Fuzzy PID Algorithm of Double Closed Loop DC Motor Speed Regulation System
CHEN Zhi, WANG Guifeng
(School of Technology and Engineering, Lanzhou University of Technology, Lanzhou 730050, China)
A speed regulation system for DC double closed loop motors is designed and simulated based on combining the fuzzy and PID control algorithms. The practical experiences and knowledge accumulated by experts and skilled operators are modeled with control rules, and the objective characteristic parameters are identified by fuzzy inference on-line. The control strategy may be changed in real time without determining the accurate objective model. The model of speed regulation system for DC double closed loop motors is established by the fuzzy control method. The output waveform obtained from MATLAB simulation shows a significant improvement of the system performance.
DC double closed-loop speed regulation system; fuzzy control; PID control; Matlab simulation
2016- 09- 10
国家自然科学基金(61366006)
陈智(1983-),男,讲师。研究方向:现代电工电子技术等。王贵锋(1964-),男,副教授。研究方向:电气工程及其自动化。
10.16180/j.cnki.issn1007-7820.2017.07.009
TP273;TM33
A
1007-7820(2017)07-033-04
