基于点云数据的建筑物立面纹理映射技术研究
2017-07-19袁浩攀侯岳方乐道
袁浩攀侯岳方乐道
(1.禹州市泓瑞测绘有限公司,河南 禹州 461670;2.河南省测绘工程院,河南 郑州 450003)
基于点云数据的建筑物立面纹理映射技术研究
袁浩攀1侯岳2方乐道2
(1.禹州市泓瑞测绘有限公司,河南 禹州 461670;2.河南省测绘工程院,河南 郑州 450003)
本文以车载激光扫描获取的点云数据及影像数据为研究对象,提出基于改进的格网法对建筑物点云信息提取,通过对建筑物立面纹理提取和最佳影像获取,得到建筑物的立面影像图像。本文对采用的技术方法和研究的内容进行详细阐述。
点云数据;格网法;纹理信息;最佳影像
从车载激光扫描系统点云及影像数据出发,基于点云的滤波分类和数字图像处理基础,设计了一套建筑物立面纹理映射的方法。首先将车载点云做抽稀等预处理,然后通过设定点云密度阈值和格网内点云高程差异权值将建筑物点云从繁杂的点云中过滤出来,得到建筑物点云,通过点云的面片拓扑关系构建建筑物点云几何框架;对CCD序列影像进行预处理,然后进行影像分割及形态学的处理;利用车载测量系统的POS数据和各个传感器间的固定几何关系建立影像与激光点云之间的一一对应关系,完成影像数据的纠正和映射[1-4]。
1 关键技术研究
本研究在传统格网法的基础上进行了一些改进,提出基于改进的格网法对建筑物点云信息提取。格网法的原理是记录判断格网坐标及格网内扫描点的个数,首先通过确定格网的大小和格网区域左下角或左上角坐标(x,y),计算每个小格网的中心坐标(x0,y0);然后,计算每个格网内的扫描点数量m,根据车载扫描仪几何关系与适宜扫描距离得到最低立面投影格网内的点数阈值θ,若扫描点数m>θ则该点作为建筑物立面点保留,否则作为噪声点剔除[5]。
对于高程点来说,格网法的扫描点从XYZ三维空间投影到XY平面,会造成Z坐标的丢失,而且在提取建筑物信息时未能充分考虑点云的高程权重。所以,本文基于格网法做了一些改进,将点云数据的高程信息作为权值参与到运算当中。
根据建筑物前立面与左侧立面、前立面与右侧立面、前立面与顶面垂直相交的拓扑关系,对其面片求交并确定所有交线方向向量机端点坐标,然后按照建筑物模型自身的对称性和完整性特性得到完整的建筑物几何框架模型。
2 研究内容
数据来源于某地区的城区建筑物,为本文车载系统绕建筑物行驶一周得到的点云数据,通过量测两条扫描线之间的间距最大为10cm,每条扫描线上的相邻两点云之间的间距约为0.9cm,通过以绝对间距为0.074m统一采样对点云进行抽稀得到预处理后的点云图像,扫描点为1 098 772,预处理后的数据处理运算提高了20~30s。通过上述格网法来计算,取Tρ=50时,可知树木未能得到完全去除,Tρ=80时能够很完善地得到建筑物的投影;但从俯视图能看到,用这种方法得到的点云数据,在建筑物正前方2棵树木未能得到有效去除(图中红色部分为未能去除的树木),这时辅以高程差异权值取TH=10m可得建筑物点云,图1为结果图。

图1 点云处理结果图
2.1 纹理信息的提取
通过车载系统的POS数据快速定位获取含有建筑物纹理的影像。POS数据中包含有相机曝光时刻的位置坐标信息、内方位元素及其他相机参数,计算影像法向量与建筑物立面法向量的夹角,得到夹角最小的影像即为最佳影像[6](见图2)。
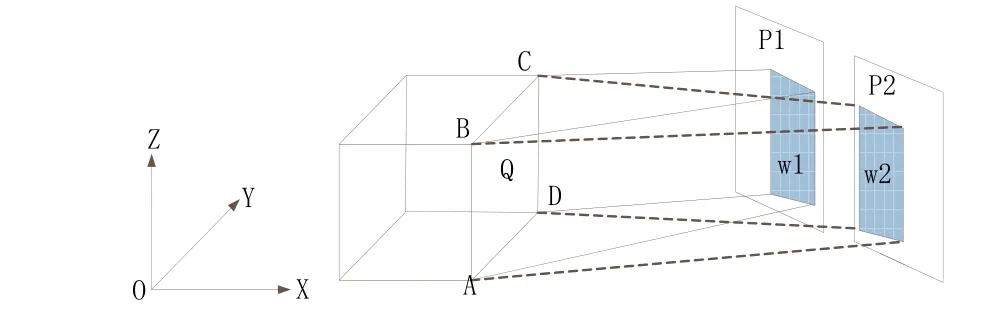
图2 模型索引图
2.2 最佳影像的选取
假设一定区域的建筑物立面为垂直于地面的规则形状,通过设置建筑物立面上任一点的法向量和CCD影像法向量的矢量夹角阈值Tθ,使两法向量夹角θi<Tθ来获取一幅或多幅影像。过程是:以建筑物某一立面Q上某点O为起点,向建筑物外侧做法向量,任意影像P上做法向量,两法向量夹角θi的值表示影像P的倾斜程度。θi越小表示影像的变形越小,与建筑物立面约近乎于平行,当θi=0时为最佳,所以在此取θmin的影像作为纹理映射影像[7]。
2.3 图像分割
该算法为局域原型目标函数的典型聚类分析方法,以数据点到原数据的距离为优化函数条件。核心理论是采用函数极值的迭代运算把原始数据划分为不同的数据集合,使数据在聚类内相似、聚类间相异。所以,根据该算法的原理清晰又可以运算海量数据的优势,能够广泛地应用于数据分析的各个方向。但是其缺点也很明显:在进行分割之前必须确定初始的聚类的数目或者收敛条件,但是对于建筑立面影像来说提取目标明确一般分为2个聚类数目,即墙面和其他。特殊的墙面影像再根据具体情况确定,同时还需要确定初始的聚类中心,根据一定的相似性准则(一般以距离为相似性测度)使数据点分配到聚类中心,形成新的聚类中心,再次迭代聚类形成中心,直到数据迭代结束,从而形成分类[8]。
2.4 研究结果
从图3可以看到,影像中包括建筑物和其他地物,建筑物影像中包括玻璃和其他材质,因此首先对图像进行分割,本文采用了K-means聚类算法对图像分割,利用数学形态学对分割后的图像进行进一步的边缘处理,得到了建筑物墙面纹理和玻璃纹理[9]。

图3 建筑物图像
[1]孟丽艳.基于车载LIDAR系统的建筑物立面纹理映射[D].焦作:河南理工大学,2015.
[2]师建辉.真实感建筑物三维模型的纹理映射优化方法研究[D].北京:中国地质大学,2015.
[3]范冲,王学.三维城市建筑物的纹理映射综述[J].测绘与空间地理信息,2014(7):1-4.
[4]王学.基于多视角影像的三维模型纹理映射研究[D].长沙:中南大学,2014.
[5]李杰.基于图像的建筑物模型重建技术研究[D].北京:北方工业大学,2012.
[6]周婷婷,韦穗,章权兵.纹理映射中的平面校正技术研究[J].计算机技术与发展,2004(10):70-72.
[7]赵煦.基于地面激光扫描点云数据的三维重建方法研究[D].武汉:武汉大学,2010.
[8]李畅.城市街道立面自动重建关键技术研究[J].测绘学报,2011(2):268.
[9]顾斌.数字图像与激光点云配准及在建筑物三维建模中的应用[D].徐州:中国矿业大学,2014.
Research on Texture Mapping of Building Facade Based on Point Cloud Data
Yuan Haopan1Hou Yue2Fang Ledao2
(1.Yuzhou Hongrui Mapping Ltd.,Yuzhou Henan 461670;2.Surveying&Mapping Engineering Institute of Henan Province,Zhengzhou Henan 450003)
Taking the point cloud data and image data acquired by vehicle laser scanning as the research object,this paper put forward to building point cloud information extraction based on improved grid method,the image of the building facade was obtained by extracting the texture of the building facade and obtaining the best image.The technical methods and contents of the text were described in detail.
point cloud data;grid method;texture information;best image
TP391.41
A
1003-5168(2017)05-0030-02
2017-04-17
袁浩攀(1988-),男,本科,助理工程师,研究方向:测绘工程、遥感科学与应用。
