增程式电动车恒功率控制方式的仿真分析
2017-07-18冯帆黄赟熹刘优
冯帆,黄赟熹,刘优
(1.陕西国防工业职业技术学院,陕西西安,710300;2.广西艾盛创制科技有限公司,广西柳州,545007;3.湖南湖大艾盛汽车技术开发有限公司,湖南长沙,410205)
增程式电动车恒功率控制方式的仿真分析
冯帆1,黄赟熹2,刘优3
(1.陕西国防工业职业技术学院,陕西西安,710300;2.广西艾盛创制科技有限公司,广西柳州,545007;3.湖南湖大艾盛汽车技术开发有限公司,湖南长沙,410205)
增程式电动车有多种发动机控制策略,本文针对一款新能源电动汽车改制的增程式电动车动力参数匹配问题,以AVL Cruise为仿真平台,采用增程器恒功率控制策略构建整车模型,计算了所设计的增程式电动车经济性能。研究结果表明,最大爬坡度、加速时间、最高车速满足车辆动力性要求。
增程式电动车;仿真;动力匹配
0 引言
目前,电动汽车普遍存在续航里程不能满足长距离行驶的需求,主要原因是动力电池的比能量不高,而且价格昂贵。为延长电动汽车的续航里程,增程式电动车是整车在纯电动模式下达到其所有的动力性能,而当车载可充电电池无法满足续航里程要求时,打开车载辅助发电装置(增程器)为动力系统提供电能,以满足行驶要求。
1 增程式电动车的工作原理
增程式电动车工作模式分为纯电动模式和增程式模式。当电池组电量较为充足时,车辆以纯电动模式运行,增程器不工作,电池组是唯一的能量源,电池组为电动机提供电能来驱动车辆;当电池组电量不足时,增程器开启,车辆以增程式模式运行,增程器为电动机提供电能来驱动车辆。此时,电池组就相当于一个能量调节装置,增程器发出的电能超出电动机所需时,剩余的电能就给电池组充电;增程器发出的电能不能满足电动机所需时,不足的部分由电池组来提供。由于增程器不直接参与驱动,发动机可以工作于稳定的状态,燃油经济性好而且排放污染小。
2 增程器控制策略
发动机的控制采用功率跟随控制策略,这种控制策略是根据整车的功率需求和电池 SOC的状态来确定发动机的工作状态。只有当电池SOC大于SOCmax并且功率需求小于Pe_low时,发动机才关闭,其他情况下,发动机实时跟随负载的功率需求。在这种控制策略下,电池能保持最佳的性能状态。
3 某型增程式电动车动力系统匹配
3.1 增程器的选配
发动机的选择可按汽车的目标最高车速计算发动机的功率,同时也会体现出汽车的爬坡性能和加速性能。由最高车速-发动机需求功率曲线可知,当目标最高车速为110km/h时,所需发动机的功率为20.44kw,考虑到车辆承载其他附加部件负载,如空调、音响、大灯及辅助驾驶电机等部件消耗,所以选配的0.55L发动机参数:2个气缸,排量0.55L,最大功率(kw/r/ min):47/9000,最大扭矩:(Nm/r/min)62/6000,怠速转速1000r/ min,怠速油耗0.7L/h,发动机工作转速目标值5000r/min,发动机工作转速对应功率30kw,发动机工作转速对应扭矩59Nm,发动机启动SOC下限值SOCmin为30%,发动机关闭SOC上限值SOCmax为60%。
在发电机的参数选配中,其电压值除去电路中的消耗应该和电池组的电压保持一致。同理发电机的功率应该与发动机的功率除去消耗功率保持一致。因此,所选定的发电机功率为30kw。
3.2 Cruise整车模型
在Cruise中搭建整车模型,如图1,并将各模块(整车、电池、电机、主减速器、发动机、发电机、轮胎等)需求参数填入,通过API模块将Cruise及搭建的Simulink控制策略联合进行仿真。
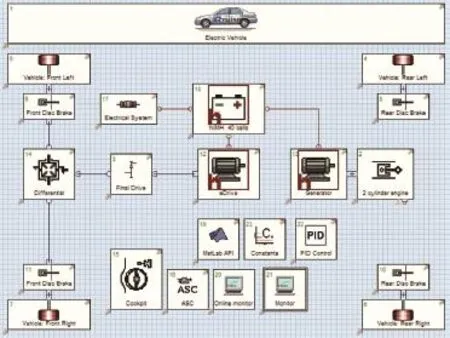
图1 增程式电动车Cruise模型
4 整车经济性能仿真结果
由仿真结果图2可知,前60km为纯电动模式,电池SOC由95%降至30%,发动机启动后工作在5000rpm,为电池充电,SOC充至60%时发动机关闭,进入纯电模式,发动机根据设定的控制策略启动及关闭,该控制策略下的百公里油耗为2.27 L/100km。
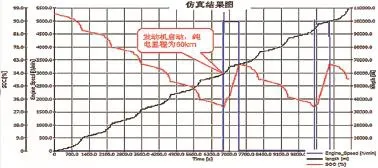
图2 SOC值、发动机转速、行程与时间的关系图
通过软件 AVL Cruise 建立仿真模型,能够直接得到整车经济性能参数,大大能够减少实验的工作量,降低研发成本。但是本研究中增程式电动车的控制方法为恒功率控制策略,将发动机的工作点一直控制在最佳经济运行工况点,没有考虑蓄电池充电功率,影响了蓄电池的使用寿命。
[1] 邹渊,孙逢春,王军等.电动汽车用仿真软件技术发展研究机械科学与技术[J],机械科学与技术,2004,23(7):761-764.
[2] 秦昀.增程式电动汽车动力传动系统参数匹配及性能仿真[D].哈尔滨: 哈尔滨工业大学汽车工程学院,2012.
Simulation Analysis of Constant Power Control Mode of Extended Electric Vehicle
Feng fan1,Huang yunxi2,Liu you3
(1.shaanxi institute of technology,Xi’an Shaanxi,710300;2.AISN Innovative Design and Manufacturing CO.,LTD,Liuzhou Guangxi,545007;3.Aisn Auto R&D CO.,LTD,Changsha Hunan,410205)
In this paper, a new energy vehicle is used to simulate the dynamic parameters matching of a new energy electric vehicle. The AVL Cruise is used as the simulation platform, and the vehicle is controlled by the constant power control strategy. Model, calculated the economic performance of the designed extended range electric vehicle. The results show that the maximum climbing speed, acceleration time and maximum speed meet the vehicle dynamic requirements.
extended range electric vehicle; simulation; dynamic matching
