适时四驱控制系统硬件在环仿真系统设计
2017-07-07冯剑波齐志权尹天文李朝兵
冯剑波, 齐志权, 尹天文, 吴 沄, 李朝兵, 苏 强
(1.北京理工大学 机械与车辆学院,北京100081;2. 重庆长安汽车有限公司 动力研究院, 重庆400023)
适时四驱控制系统硬件在环仿真系统设计
冯剑波1, 齐志权1, 尹天文1, 吴 沄2, 李朝兵2, 苏 强2
(1.北京理工大学 机械与车辆学院,北京100081;2. 重庆长安汽车有限公司 动力研究院, 重庆400023)
电控适时四驱系统在城市型SUV上得到了越来越广泛的应用.针对某款车辆的适时四驱系统的扭矩管理器及传动系统进行建模,基于dSPACE+Carsim工具设计了硬件在环仿真平台,并对典型工况下的适时四驱控制系统进行了仿真研究.结果表明,所设计的适时四驱控制硬件在环仿真系统完全可以满足系统控制策略开发的需要,为下一步控制系统的开发设计奠定了基础.
适时四驱;轴间扭矩分配;硬件在环仿真
相对于两驱车,四驱汽车在控制前后轴动力分配以减小车辆滑转率和提高车辆动力性等方面有很大的优势.四驱系统分为3种:分时四驱系统、适时四驱系统以及全时四驱系统.分时四驱:驾驶者必须根据路面状况和经验通过拨动分动器档杆调节至4WD或2WD,是越野车最常见的四轮驱动形式[1-2],显然,分时四驱系统由于操作不方便及过分依赖驾驶者经验等缺点具有较强的局限性;全时四驱:即汽车行驶过程中,全程四轮驱动的系统形式,但是全路段的四驱增加了油耗,故而其燃油经济性较差[2-3];适时四驱:正常工况下为两轮驱动,仅在特殊时刻下自动切换为四驱模式,燃油经济性好,且结构简单,成本较低.
目前许多汽车公司已经开发出了各种各样的适时四驱系统, 其中BorgWarner公司开发出的NextracTM则是较为突出的一种,John Barlage[4]等介绍了NextracTM的基本结构及其工作原理,并给出了诸如寿命曲线和阶跃响应等的特性曲线,而Hiroyuki Ando和Tsuyoshi Murakami[5]则在其特性的基础上提出了一定的控制策略,其它相关文献[6]中也有提及电磁离合式差速器的控制原理.然而,对于基于NextracTM扭矩管理器的适时四驱系统深入研究依然较为缺乏.
本文首先针对某款车辆的适时四驱系统的扭矩管理器及传动系统进行了建模,然后基于dSPACE+Carsim工具设计了硬件在环仿真平台,最后通过仿真验证了该硬件在环平台的有效性和可行性.
1 适时四驱系统结构
适时四驱系统拓扑结构与全时四驱拓扑结构存在较大差异.适时四驱系统没有装备类似全时四驱系统一样的中央差速装置,而是利用一组多片离合器向后轴传递扭矩.本文的研究对象是基于前置前驱车辆的适时四驱系统.其拓扑结构如图1所示.

图1 适时四驱系统拓扑结构
典型适时四驱系统结构由主减速器1、前轴差速器总成2、取力器(PTU)3、传动轴4、扭矩管理器5、后轴减速器6、后轴差速器总成7组成.NextracTM扭矩管理器5是一组电控多片离合装置,通过电子控制离合器片压紧力来调节传递到后轴的扭矩.
2 NextracTM建模
NextracTM的特点在于其第一级离合器是由电磁阀直接控制,且不同于传统的钢制离合器摩擦片,NextracTM采用的是有机材料摩擦片,这种材料赋予其卓越的NVH性能和动力传动系统整体的经济性.NextracTM中央差速器扭矩转换部分的结构如图2所示.其执行机构主要由3部分构成:第一级离合器、凸板-钢球机构、第二级离合器.其中第一级离合器的开合状态及压紧程度由一个电磁线圈和电枢组成的电磁阀驱动控制.
当驱动扭矩控制单元输出的控制电流i为0时,第一级离合器处于放松状态,后轴输入扭矩为0;当驱动扭矩控制单元输出的控制电流i不为0时,通电线圈产生的磁场将吸引电枢轴向移动并压紧第一级离合器,第一级离合器产生的摩擦力矩使主动凸板随同转动,而从动凸板则与后轴力矩输入轴保持相同转速,此时若前后轴存在转速差,则在主从动凸板之间将产生相对转动,导致钢球周向移动并使得第二级离合器接合压紧,然后由输入轴及壳体传入的力矩将通过两级离合器及凸板-钢球机构向后轴输出[7].

图2 NextracTM扭矩管理器
2.1 NextracTM动力学模型
NextracTM扭矩管理器控制电流对应扭矩管理器能传输的最大扭矩,即扭矩容量Tcap,如图3所示.当传输转矩大于该容量时,离合器处于滑摩状态,NextracTM输出扭矩即为Tcap,否则离合器处于锁止状态,前后轴机械连接.
对离合器工作状态判断的依据为:
1)如果当前离合器处于滑摩状态,而仿真过程中出现如下情况时,
(1)
则中央差速器由滑摩状态转为锁止状态.其中dωtrcase为当前仿真时刻前后传动轴转速差,dωtrcase_old表示前一仿真时刻前后轴转速差,Tlock为在锁定的离合器上加载力矩的理论计算值,其计算公式为

(2)
其中,
.
(3)
式中:I表示转动惯量;axle_F、axle_R、wF、axle_LF、axle_LR、shaft_F、shaft_R分别表示前轴、后轴、前轮、前左半轴、后左半轴、前传动轴以及后传动轴;My_load为每个车轮上涉及到轮胎力及转矩的负载力矩;N表示轮间差速器的传动比.当离合器锁止时,扭矩管理器的输出转矩即为Tlock.
2)如果当前离合器处于锁止状态,而仿真过程中出现如下情况时,
|Tcap|<|Ttrcase|,
(4)
则离合器转为滑摩状态.其中,
Ttrcase=Klock_trcase×dφtrcase+Dlock_trcase×dωtrcase
,
(5)
式中:Klock_trcase、Dlock_trcase分别表示离合器锁止时的刚度和阻尼;dφtrcase表示前后传动轴之间的转角差.

图3 NextracTM扭矩管理器扭矩容量
2.2 NextracTM动力学模型在Matlab/Simulink中的实现
NextracTM动力学模型的输入为控制器向第一级离合器电磁线圈中输入的控制电流、变速器的输出转矩、前后轴转速、地面作用于4个车轮的切向反作用力及其各自受到的滚动阻力偶矩,输出为传输到后轮的驱动扭矩,如图4所示.
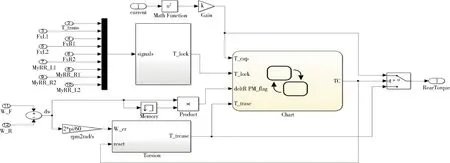
图4 NextracTM扭矩管理器simulink模型
3 适时四驱控制系统硬件在环仿真平台
基于DS1103 dSPACE系统和Carsim车辆动力学仿真软件,在MATLAB/Simulink环境中搭建适时四驱控制系统硬件在环仿真平台.整车模型在Carsim中搭建,扭矩管理器模型在Simulink环境下构建,适时四驱控制器通过CAN总线和接口电路与dSPACE进行信息交互,实现联合仿真.具体结构如图5所示,运行于dSPACE系统中的车辆模型通过CAN总线输出轮速、节气门开度、方向盘转角等车辆状态信息,适时控制系统控制器(AWD控制器)实物基于该信息进行分析判断,并输出控制信号控制扭矩管理器实物;设计信号转换电路,采集ITM线圈电流并输入dSPACE系统中,ITM模型基于该电流信号和车辆状态信息实时计算前后轴驱动转矩,反馈到Carsim车辆模型中,实现适时四驱控制系统硬件在环仿真.图6为适时四驱控制系统硬件在环平台实物.

图5 适时四驱控制系统硬件在环平台原理

图6 适时四驱控制系统硬件在环平台实物
4 适时四驱控制系统硬件在环试验
1)AWD控制直线加速行驶性能对比
车辆在峰值附着系数为0.85的路面上从0 km/h全油门起步加速,AWD与FWD车辆对比结果如图7所示.其中实线表示AWD控制结果,虚线表示FWD结果.可以看出,车速较低时,车辆纵向加速度较大,控制器输出较大电流,扭矩管理器迅速锁止;随着车速上升,加速度随之减小,控制电流减小,扭矩管理器解锁进入滑磨状态;当车速较高时,加速度较小,前后轴转速差也较小,控制器不输出电流,车辆变为前驱行驶.
与车辆前驱对比.在该工况下,AWD系统在车辆起步初始阶段防止了前后轴转速差过大,明显提升了车辆在起步初始阶段的加速度和车速.相比于FWD车辆,AWD车辆的百公里加速时间缩短0.84 s;起步过程中峰值纵向加速度提高约0.3 g,提升约75%.但由于路面附着情况良好,AWD车辆在高速区间动力性提升不明显,也正因此AWD系统在高速区间采用两驱行驶.

图7 AWD与FWD车辆控制直线加速度对比结果
2)AWD控制操纵稳定性能对比
车辆沿目标双移线行驶,并在弯道中加速.AWD控制结果和FWD车辆仿真结果如图8所示.可以看出,在此工况下,相比于FWD,AWD车辆可以在驾驶员明显较小的方向盘转角下使车辆有更好的循迹性.即具有较好的操作性.

图8 AWD控制结果和FWD仿真结果对比
5 结 论
基于dSPACE+Carsim工具设计的在环仿真平台可以有效提高适时四驱控制系统研究的灵活性,在此平台的基础上对典型工况下的适时四驱控制系统进行了仿真研究.结果表明,AWD控制系统能够较为明显地提升车辆的动力性和操纵性,工作效果符合预期.
[1] Kiyotaka L. The Lexus Traction Control (TRAC) System[R]. SAE Technical Paper 900212, 1990.doi:10.4271/900212.
[2] 刘清波, 李 季. 智能四驱与其他四驱系统仿真比较[J].科技经济市场 ,2006(5):16.
[3] Mitsuru O,Hirokazu S, Takashi Y. Development of a new electronically controlled 4WD system: Toyota active torque control 4WD[J]. SAE,1999-01-0744.
[4] Barlage J, Mastie J, Niffenegger D. Development of NextracTM Electronic Driveline Coupling for Front-Wheel Drive Based All-Wheel Drive Applications[R]. SAE Technical Paper, 2007-01-0660.
[5] Ando H, Murakami T. Awd vehicle simulation with the intelligent torque controlled coupling as a fully controllable awd system[R]. SAE Technical Paper, 2005-01-0552.
[6] Piyabongkarn D, Grogg J, Yuan Q, et al. Dynamic modeling of torque-biasing devices for vehicle yaw control[R]. SAE Technical Paper, 2006-01-1963.
[7] 肖文栋. 某四驱汽车驱动扭矩分配特性与滑模变结构控制研究[D].吉林:吉林大学,2015.
Design of Hardware-in-the-Loop Simulation Platform forOn-Demand All-Wheel-Drive Vehicles
FENG Jian-bo1, QI Zhi-quan1, YIN Tian-wen1, WU Yun2, LI Chao-bing2, SU Qiang2
(1.School of Mechanical Engineering,Beijing Institute of Technology,Beijing 100081,China;2. Changan Automotive Co. LTD., Chongqing 400023,China)
The electronically controlled on-demand All-Wheel-Drive (AWD) system is increasingly used in urban SUVs. An Intelligent Torque Management (ITM) controller of the system and the transmission of a certain urban SUV are modeled. Based on the dSPACE+Carsim, a hardware-in-the-loop (HIL) simulation platform is designed. The simulation study of the control system is carried out under some typical working conditions. The simulation results show that the designed HIL system can meet the requirements of developing the corresponding control strategies, laying a foundation for the further research on the control system.
on-demand AWD;torque distribution between driving shafts;hardware-in-the-loop simulation
1009-4687(2017)02-0014-04
2016-11-18
冯剑波(1989-),男,博士研究生,研究方向为基于适时四驱系统的车辆动力学及其控制.
U461.1
A