高空太阳能无人机动力学建模与ACLD结构振动控制研究
2017-07-04孟军辉中国农业大学工学院吕明云北京航空航天大学航空科学与工程学院
孟军辉 ( 中国农业大学工学院) , 吕明云(北京航空航天大学航空科学与工程学院)
高空太阳能无人机大多采用大展弦比机翼,机翼柔性变形和振动问题随之而来,对结构振动控制技术提出了更高的要求。与其他振动控制技术相比,主动约束层阻尼技术对于结构振动的控制更为有效,随着研究的深入和发展,未来将逐渐应用到工程实际中。
高空长航时飞机机翼大多具有柔性、展弦比大的特点,大展弦比机翼的大跨度、轻质量、低刚度的结构特点,导致其具有低频率、弱阻尼、模态密集的动力学特性。发动机推力和控制力以及复杂的大气环境干扰,都可能引发大展弦比机翼的振动。大展弦比机翼由于其自身大柔性的特点,在飞行载荷作用下,会产生大的柔性变形,进而对其动力学特性产生影响,使得针对该结构的振动控制技术更加复杂,对结构的振动控制技术也提出了更高的要求。
针对这种要求,结合以往的振动控制技术(被动阻尼减振结构和主动控制减振结构),提出了主动约束层阻尼(Active Constrained Layer Damping,ACLD)结构。主动约束层阻尼是以可控的压电材料代替被动约束层阻尼结构中不可控的约束层,通过可控的约束层主动地控制黏弹性材料的剪切变量,进而达到控制振动能量的耗散的主动约束形式。它是一种典型的主、被动一体化的振动控制方法,充分结合了主动控制与被动阻尼作用各自的优势,在结构振动控制方面展示了极其广阔的应用前景。
临近空间太阳能无人机发展
近年来,随着临近空间的利用价值不断体现,各国加快了开发临近空间的步伐,纷纷开展了高空长航时无人机的技术和应用研究。以巡航高度为20~100km、巡航时间为数天/月/年,作为当前临近空间飞行器研究的主要飞行指标,这样的高空长航时(High-Altitude Long-Endurance,HALE)飞行器相比以往的航空航天飞行器具有极大优势。HALE飞行器可以替代卫星,以更少的成本、更灵活的方式,不间断执行许多重要军用和民用任务,包括军用领域的情报/侦察/监视、实时目标捕捉、自然灾害快速响应、国土边防监控、空间监视、空中指挥以及空中打击等,以及民用领域的气象科学研究、通信、大气环境监测等。而且相比于卫星,HALE飞行器更可控和可维护;相比于现有航空器,在同温层飞行的HALE飞行器,更易于执行全天候任务。
临近空间超长航时飞行器有空气动力型和空气静力型两大类。其中,高空气球因技术难度小成为首先进入实际应用的临近空间飞行器,但因其对一些气象因素尤其是大气的剧烈运动比较敏感,容易失去控制,因此军事应用价值有限;临近空间飞艇类似地球同步卫星,作为一种重要的定点平台,有较高的军事应用前景,但进入实际应用之前仍需进行关键技术突破;随着技术进步,高空长航时无人机的飞行高度有望进一步提高,留空时间有望进一步延长,从而成为军事先进国家近期及未来利用临近空间的重要工具。
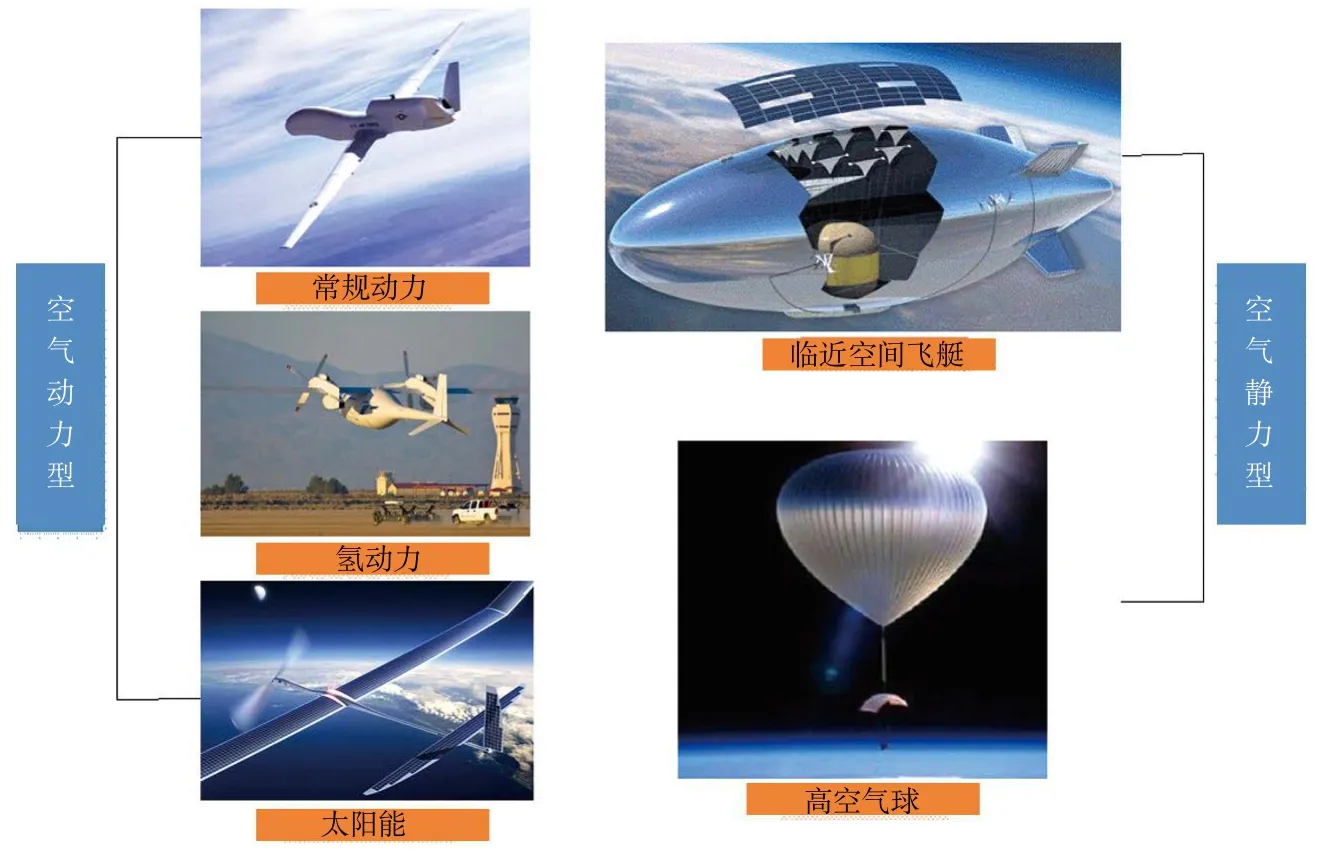
临近空间超长航时飞行器的分类。
当前,在太阳能无人机领域,美国仍然处于领先地位,其在细分领域的研究、开发更为明晰,不论是政府支持,如美国宇航局(NASA)支持的“太阳神”(Helios),国防部预研局(DARPA)支持的“太阳鹰”(由波音公司负责研发),还是私营公司自身研发,如谷歌(Google)资助泰坦航宇公司(Titan Aerospace)研发,脸书(Facebook)研发的“天鹰座”(Aquila)。这些太阳能无人机有的已经试飞成功,有的试飞失败,有的项目已经下马,命运不一。近日,中国航天科技集团公司第十一研究院自主研发的新型“彩虹”太阳能无人机在西北某地完成临近空间飞行试验,试验取得圆满成功。这是我国首次成功研制的大型长航时临近空间太阳能无人机,尺度和重量均为全球领先,填补了我国在这一领域的技术空白,核心关键技术和设备全部实现国产化,是支撑我国临近空间开发利用的重要基础手段,标志着我国已成为继美、英之后第三个掌握临近空间太阳能无人机技术的国家,是中国制造的又一经典之作,使得我国迈入了全球太阳能无人机发展第一梯队。
高空长航时无人机虽然具有极其重要的应用价值和发展潜力,但是目前的太阳能无人机产品大多受限于种种因素,续航能力有限,与全天候、长航时的发展要求仍有较大差距。从结构设计和动力学的角度来说,为获得低重量和高升阻比,高空长航时无人机普遍使用复合材料等轻质材料,且采用大展弦比设计,结构细长,导致结构的柔性较大。同时,结构的柔性变形与全机的刚体运动耦合,产生刚柔耦合系统问题,结构柔性变形与气动力耦合,产生非线性气动弹性问题。此外,结构大变形还可能导致飞机表面局部流动分离,发生气动失速。

我国自行研制的临近空间大型长航时太阳能无人机。
大展弦比轻质机翼的动力学问题
由于高空长航时无人机要求低飞行速度、高升力、低阻力,使得这种无人机的机翼展弦比特别大。大展弦比机翼一般全部采用复合材料,具有大翼展、大展弦比、翼面积大、翼型相对厚度小和重量轻等特点,基频很低,是一种柔性很强的结构。机翼基频很低时,为结构模态参数的测量和有限元计算带来了极大的挑战。对于大展弦比轻质机翼结构的模态试验而言,需要解决的主要问题有重力场的克服、空气阻力的影响、支撑系统的选择、传感器的附加质量问题、激励力的施加方式、非线性因素的处理等几个方面。对于大展弦比轻质机翼结构的有限元计算而言,需要解决的主要问题是机翼结构的简化与等效、机翼附加系统的简化与等效、外挂的处理、接头间隙、摩擦等非线性因素的影响。
飞行器所处的动环境是复杂而恶劣的。一方面表现在激励源多而复杂,主要的激励源有发动机推力、附面层噪声、控制力、突风、飞行阶段的转换等。这些激励有些是规律性的,有些是随机性的。另一方面是由于实际环境中往往几种激励同时作用在飞行器上,因此,为了保证飞行器结构安全可靠,应该对飞行器承受动载荷比较严重的一些情况加以研究,分析这些外激励的性质、大小和变化规律,以确定设计时所必需的动载荷,作为结构设计的重要依据之一。
从动力学和振动控制的角度,大展弦比轻质机翼及外挂附件具有以下明显的特点:
(1)结构复杂,柔性大展弦比轻质机翼带有刚性附件,建模困难。
(2)系统柔性大,模态频率低且密集,模态耦合程度高。
(3)未被控制时的结构阻尼小。
(4)瞬态环境条件(或载荷)及载荷的不确定性需求振动控制的频带较宽。
(5)结构弹性和气动力存在着多种耦合,气动弹性效应明显。
(6)要求振动控制系统可靠性高、能耗低且附加质量低。
由于大展弦比轻质机翼结构存在上述特点,因此,必须要建立较为准确的柔性结构动力学模型,对结构进行精确的参数辨识,才能正确认识结构的物理参数,为结构振动控制提供模型保证。长时间的振动容易造成柔性结构的疲劳破坏,寿命缩短,因此,必须对这类柔性结构进行振动控制。由于被动控制的频带比较窄,只能对某一频段的控制达到比较好的效果,而大型柔性结构是一个连续系统,需要比较宽的频带控制,被动控制不再适用。而且大型柔性结构的固有频率一般很低,可能需要控制的模态都集中在0~1Hz频率范围内,很多被动控制起作用的频率范围很难达到如此低的频率,纯被动控制在这里很难满足实际要求,因此,对这类柔性结构的稳定性控制有必要采用主被动混合控制的方法。
主动约束层阻尼结构动力学建模及控制
1994年,Baz和Ro在被动约束层阻尼结构和主动阻尼技术的基础上,提出了主动约束层阻尼的概念,它的基本思想是用可控的压电智能材料代替不可控的约束层,通过施加控制电压使约束层主动控制黏弹性材料的剪切变形,实现主动的结构振动控制。它将主动控制与被动约束完美地结合,既具有主动控制附加质量小、可控频率宽、响应速度快和低频控制效果好的优点,又具有被动控制安全可靠的特点。
ACLD结构基本类型
由于压电材料性能稳定、能耗低、频带宽、刚度大、易于操作、响应快、电场与应变场近似线性,因此,绝大多数ACLD结构用压电材料作执行器。根据压电驱动器的位置,可将ACLD结构分为三类:
(1)压电驱动器直接代替被动约束层。这是一类最基本的ACLD结构,通过控制压电驱动器的变形可以增加黏弹性材料的剪切变形,以耗散更多的能量。此类ACLD结构得到了广泛的研究。尽管压电驱动器增加了黏弹性材料的剪切变形,但是却减少了压电驱动器对结构的直接控制力。因此,该类结构能否比主动控制效果更好的关键是黏弹性材料耗散的能量是否比直接控制耗散的能量更多。
(2)压电驱动器粘贴在被动约束层上。压电驱动器通过控制约束层的变形,增加黏弹性材料的剪切变形。由于约束层的弹性模量远远大于黏弹层,因此,约束层的变形远远小于第一类ACLD中的黏弹性材料的变形。这样一方面降低了黏弹性材料的剪切变形,另一方面增加了压电驱动器对基体结构的直接控制力所做的负功。
(3)压电驱动器直接代替约束层,且在黏弹层和基体之间又增加了一层压电层,增加的压电层既可以作为压电传感器,又可以作为压电驱动器。
ACLD结构动力学建模
ACLD结构的动力学建模主要完成约束层、阻尼层、基体结构以及整体结构数学模型的建立。由于黏弹性阻尼材料的力学本构关系受结构振动频率、振动幅值以及环境温度等因素的影响较大,因此,对其建立合理的模型是进行ACLD整体结构建模的关键。建立结构的动力学模型是研究结构的动力学特性及对结构进行改进的基础。对于ACLD整体结构的建模方法可归纳为解析法、数值法和实验法等。
有限元方法是建立结构动力学模型的最有效的方法,只有与有限元方法相兼容的黏弹性材料模型才能用于实际工程应用。对于复杂的大型柔性结构等阶数较高的模型进行控制器设计时,控制器的成本和复杂性随受控对象阶数的增加会大幅提高,因此,有必要对模型进行降阶。在保证模型主要特征的前提下,通过模型降阶可以使高阶复杂模型变成一个低阶的模型。在现代控制理论中,从系统的可控性、可观性出发,利用一些降阶方法将那些不可观、不可控的模态剔除,可实现模型的降阶。比较成熟的方法有矩量匹配法、Pade逼近法、Rout逼近法、误差极小化法、摄动法以及集结法等。在振动主动控制理论中采用的模型降阶方法主要有:质量凝结法(Mass Condensation)、平衡降阶法(Balanced Reduction)、代价分析法(Cost Analysis)、最优投影法(Optimal Projection)。
ACLD的控制策略
主动约束层阻尼技术的基本思想是用可控的压电材料代替被动约束层阻尼结构中不可控的约束层,通过对约束层施加控制电压主动地控制黏弹性材料的剪切变形,从而实现对结构振动的有效控制。因此,如何给约束层提供控制信号以及提供什么样的约束信号,即控制策略,成为ACLD结构振动控制的重要研究内容之一,常用的控制方法有常系数比例/微分(PD)控制、边界控制、线性二次最优控制、鲁棒控制等。
ACLD系统模型的优化设计
由于ACLD结构中,黏弹性阻尼层以及约束层的厚度、大小和在基体结构上的位置可以有许多不同的组合形式,每一种组合都会产生不同的作用效果,因此,如何能以最轻的重量、最小的控制代价获得最优的振动控制能量耗散特性则是进行ACLD结构优化设计的主要目标。目前,ACLD结构的优化设计主要围绕着控制增益,ACLD的厚度、长度和在基体结构上的位置进行。工程上从经济适用方面考虑,希望采用尽可能少的作动器。因此,将作动器配置在最优位置具有重要的实用价值。国内外学者已提出了多种作动器位置优化准则,如性能指标期望最小准则、控制能量最小准则、最优控制代价最小准则、模态坐标提取进度准则和输出可控度准则等。这些优化方法多数是建立在系统状态空间方程基础上。
结论
ACLD振动控制技术是一种可行的新型阻尼技术和混合控制方案,它将被动约束层阻尼技术的可靠稳定性与主动阻尼技术的高效可控充分地结合在一起,具有更高的能量耗散特性且适用于更宽的频率和温度变化范围。作为当前振动控制研究的重要方向之一,ACLD的结构建模、控制和结构优化的研究正在不断深入,并且推动该技术被逐渐应用于实际工程领域当中。总结已经取得的研究成果,ACLD结构的研究和应用还有待完善,仍有许多问题需要进一步的研究探讨。
(1)整体建模。结合在利用有限元方法对ACLD整体结构进行建模时,往往认为约束层、阻尼层以及基体在同一截面任一点的横向位移相同,忽略阻尼层可能发生厚度变形。
(2)控制策略。由于ACLD中黏弹阻尼层受环境影响大,因此需要发展更合适的控制策略,如鲁棒控制、智能控制等,以克服和解决模型建立的不确定性以及外部干扰的影响。
(3)结构优化。在ACLD结构中,各层材料的模量、厚度、泊松比以及在基体结构上的位置、尺寸、是否离散等可以有不同的组合形式,而每一种不同的组合都会对应产生不同的作用效果。这是一个多参数多目标的优化问题,需要进一步结合先进的优化方案进行研究。 ■