通信受限的网络化多智能体系统编队控制*
2017-07-03宋娜洪小敏周川
宋娜 洪小敏 周川
(南京理工大学自动化学院, 南京 210094)
通信受限的网络化多智能体系统编队控制*
宋娜 洪小敏 周川†
(南京理工大学自动化学院, 南京 210094)
主要研究了具有通信受限及不确定性的无线网络下的二阶多智能体系统的编队控制问题.针对无线网络的介质访问约束,采用二进制序列设计智能体节点调度协议,使得满足约束条件的智能体节点经网络传输其采样信息;另一方面,为建立更符合实际的通信信道模型,区别于传统的固定连接权重拓扑图,考虑到无线网络的不确定性及拓扑连接权重与智能体节点之间距离的关系,利用无线信道的度量指标构建了多智能体通信拓扑的新模型.定义信息更新误差及编队误差,将二阶多智能体系统模型转化为闭环延时系统模型.然后,构造Lyapunov-Krasovskii函数并利用LMI方法设计了编队控制协议.最后,通过仿真验证了所提方法的有效性.
多智能体系统, 编队控制, 无线网络, 通信受限, 不确定性
引言
编队控制问题已成为多智能体系统研究的一个热点.通常,多智能体系统编队控制是指设计合适的控制协议,使得多个网络化的智能体节点达到期望的速度及位置(或相对位置),并保持队形运动.
目前,已有很多文献对多智能体系统的编队控制进行了研究[1-8,23].其中,文献[2]针对一阶多智能体系统,通过相对位置的测量估计分布式位置设计了编队控制策略,并将提出的策略应用到轮式机器人编队控制中.文献[6]不仅针对具有变化有向通信拓扑的移动自主多智能体系统的分布式非线性控制问题,提出了分布式非线性控制策略,使得二阶多智能体系统的控制输出渐近收敛到一致;且通过动态反馈线性化将具有非完整约束的轮式机器人模型转换为两个二阶积分模型,研究了轮式机器人的编队控制问题.可见,以上文献均假设网络信道容量是理想无约束的.然而,多智能体系统作为一种特殊的网络控制系统,它包含多个智能体节点,且通过网络传输其采样信息.在实际应用中,通信网络(特别是无线网络)往往存在介质访问约束等问题.介质访问约束是指任一时刻仅有有限个智能体节点的信息能通过网络传输.这将导致智能体节点的控制器不能获得所有传感器的采样信息,从而影响系统的控制性能甚至使系统失稳.针对具有介质访问约束的网络控制系统的控制,主要是设计调度策略决定网络节点信息的发送顺序,如常见的RR(Round-Robin,轮询调度)、TOD(Try Once Discard,尝试一次丢弃)、EDF(Earliest Deadline First,最小截止期优先)等.此外,针对由多个被控对象组成的具有介质访问约束及位速率约束的网络控制系统,文献[9]基于平均驻留时间方法调度系统节点,并采用线性规划优化算法在线分配网络带宽.因此,介质访问约束下的多智能体系统编队控制的研究具有重要意义,而目前已有的研究结果中未涉及介质访问约束下的多智能体编队控制.
在多智能体系统编队控制的研究中,通常采用拓扑图表示智能体节点与其邻接节点之间的信息传输通道.现有文献中,大部分的研究均假设拓扑图的交互权重固定不变(固定拓扑情况下)或者根据某种规则在有限集里变化(切换拓扑情况下)[10-13].文献[10]针对具有时变延时的非线性多智能体系统,采用人工势能函数方法,研究了根据马尔科夫随机过程切换的通信拓扑下的分布式编队问题.文献[12]采用多领导的方式研究了有向通信拓扑下具有时变延时的二阶多智能体系统的时变编队以及时不变编队控制问题.然而,在实际的网络传输中,随着接收器和发送器之间的有效距离变化,通信拓扑的交互权重往往是动态变化的.如文献[14]利用相应的调度函数建立了不确定的通信拓扑模型,研究了高阶多智能体系统的跟踪问题.文献[15]研究了具有动态变化拓扑及多时变延时的多智能体系统的连续时间平均一致性问题.为建立更加符合实际的网络通信模型,用于度量无线连接的性能指标在移动网络中得到了研究,如中断概率[16]、信噪比[17],及接收概率[18]等.因此,本文将针对具有介质访问约束及信道不确定性的无线网络通信下的二阶多智能体系统的编队控制问题展开研究,主要工作与贡献如下:
(1)考虑到无线通信受到多径衰竭、遮蔽及发送器和接收器之间距离变化等因素的影响,区别于传统的固定连接权重的拓扑图模型,引入接收概率建立更符合实际的交互权重通信拓扑新模型,使其连接权重随着智能体节点之间距离的变化而变化.这种方法避免了超过通信距离、遮蔽和多径衰竭等不良情况下的传输请求,减少了不必要的数据传输,同时也便于实际应用中实现.
(2)针对无线通信网络的介质访问约束,首次采用二进制序列设计智能体节点调度协议,并利用该调度协议在采样时刻调度满足条件的智能体节点接入网络.通过引入信息更新误差及编队误差,并设计有效的编队控制策略,将二阶多智能体系统编队控制问题转换为具有时变延时的闭环系统的稳定性问题求解.
1 问题描述
考虑具有N个智能体节点(编号为1,2,……,N)和一个虚拟领导者(编号为0)的二阶多智能体系统.第i个智能体节点的模型为:
(1)

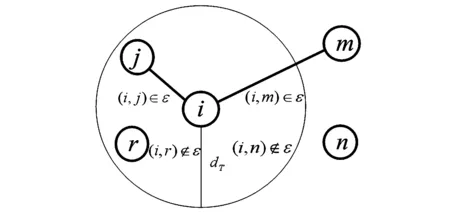
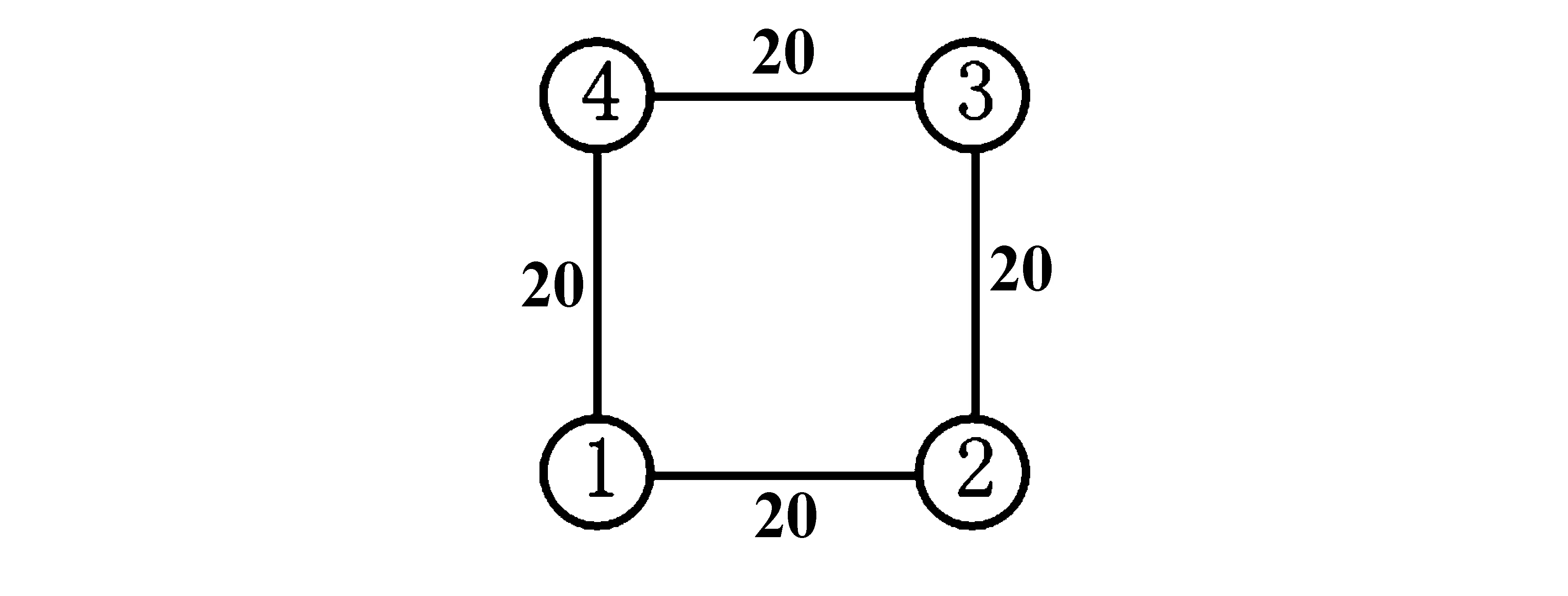
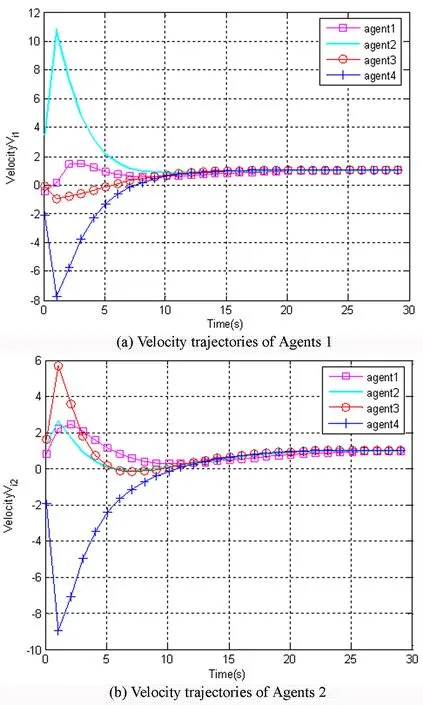
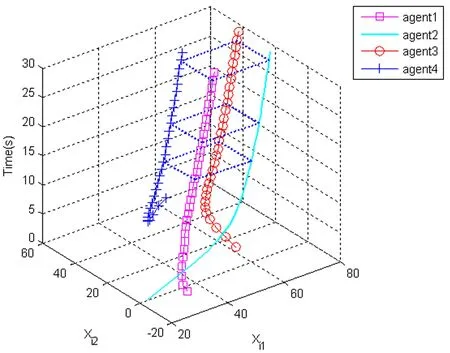
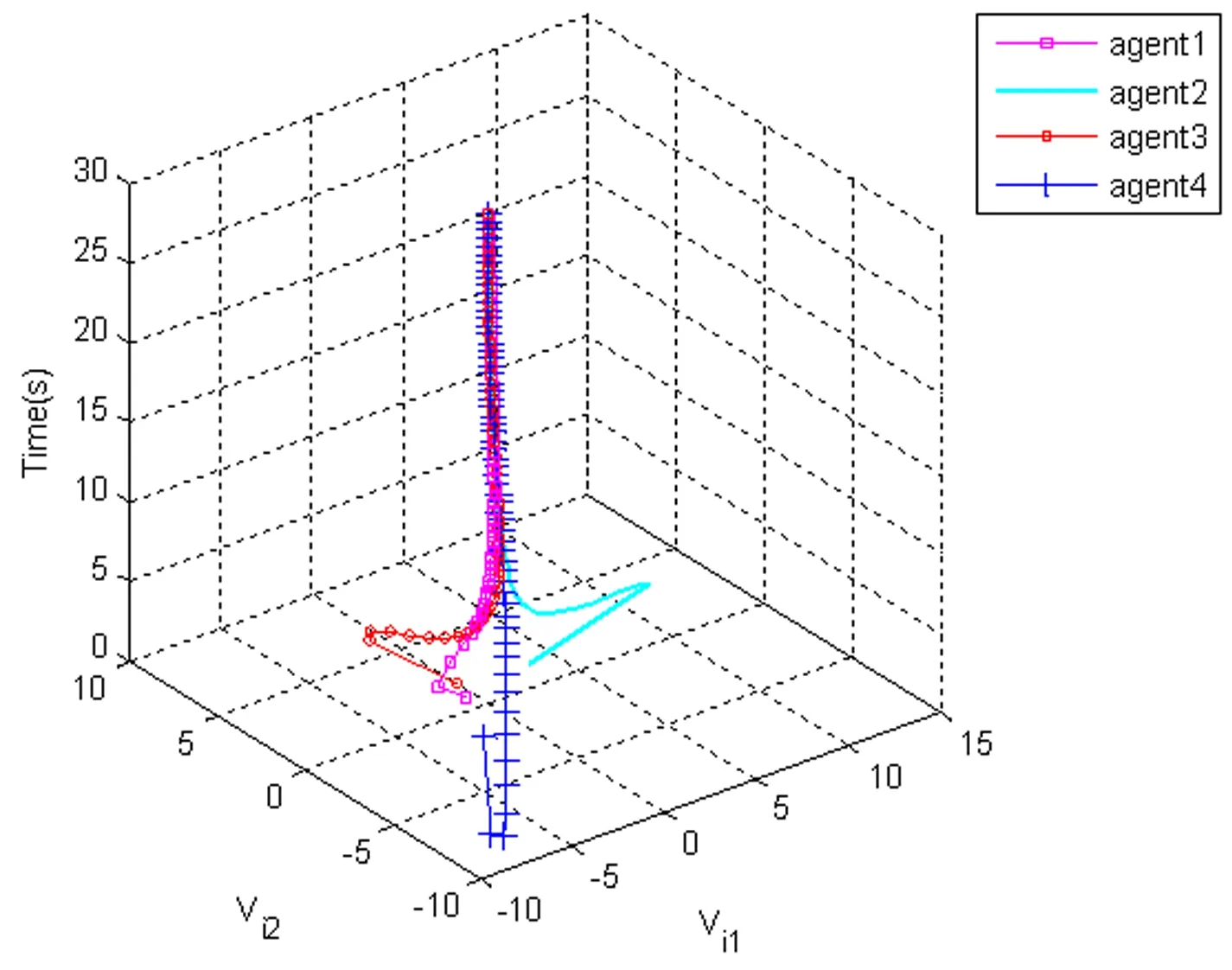
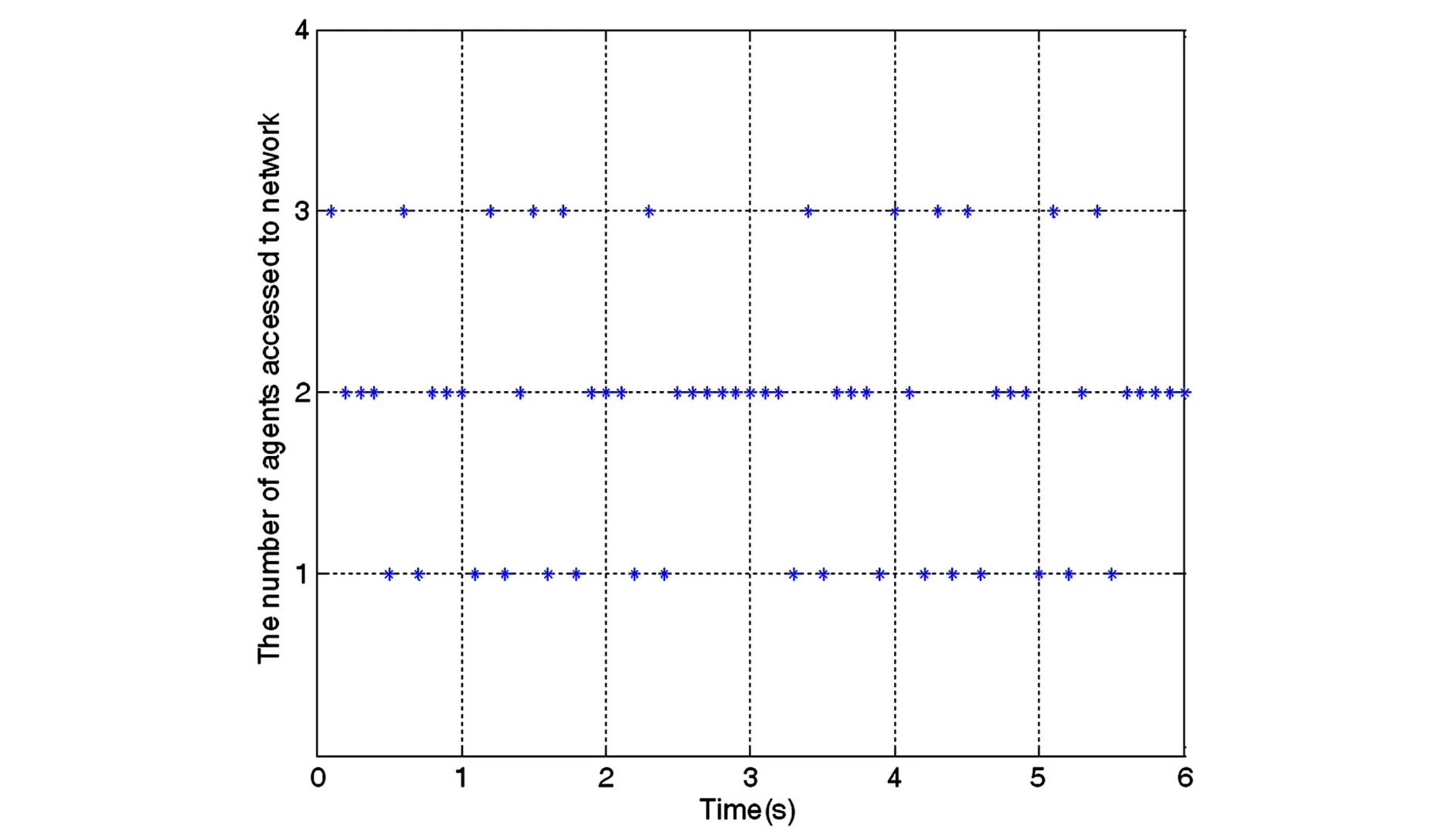
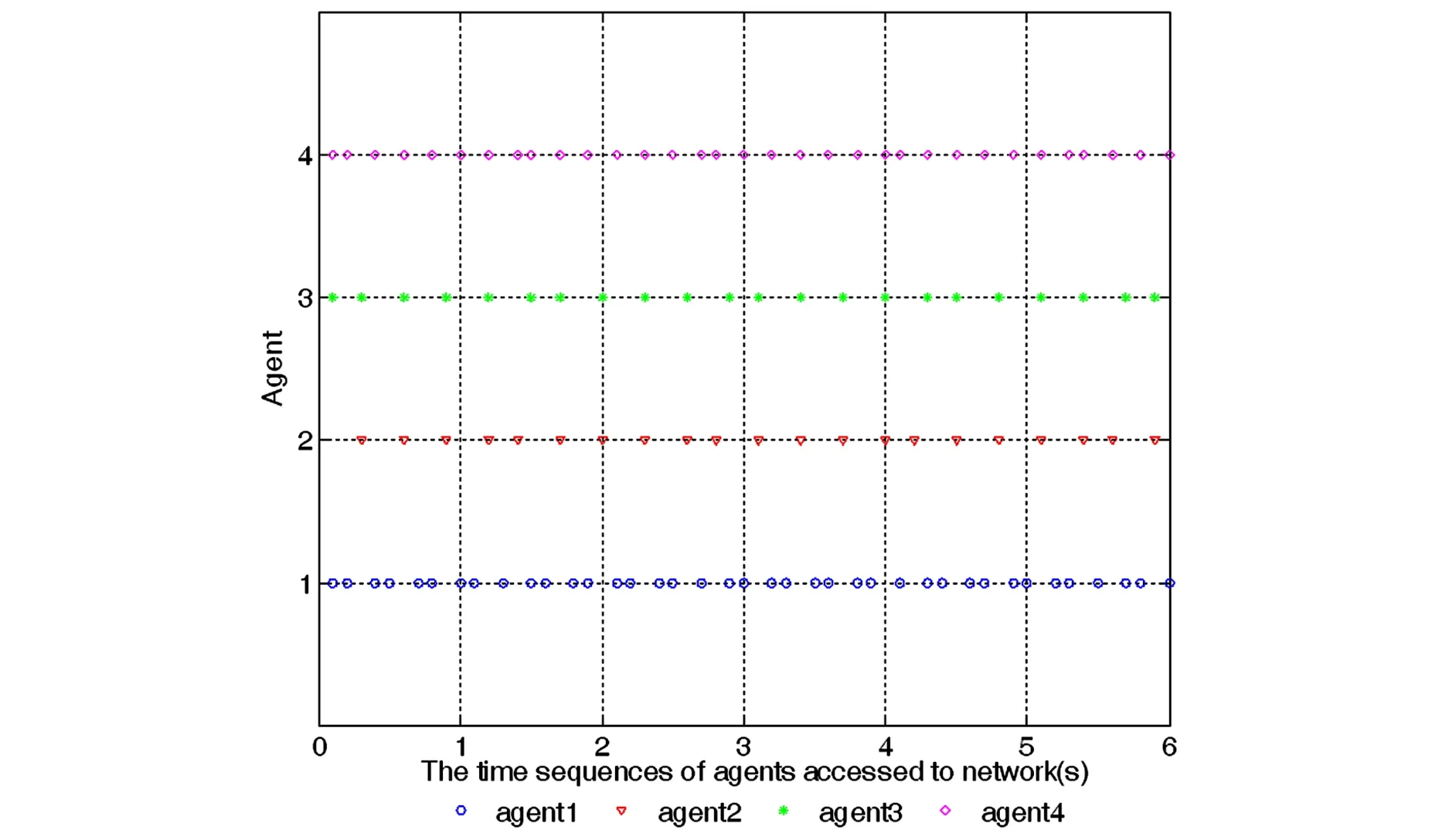
假设1N个智能体节点中最多允许C个智能体节点接入网络(C 图1 第i个智能体节点的结构Fig. 1 Structure of the N agent 假设2 执行器、控制器的工作方式均为事件驱动,传感器的工作方式为时间驱动,其采样周期为h,h>0. 如图1所示,由于无线网络通信通道的介质访问约束,任一时刻最多允许C个智能体节点接入无线网络.为此,将通信时间划分为多个具有相同时间间隔为h的时间槽.在每个采样时刻(记为k,k=0,1,2,…),利用如(2)式所示[19]的二进制节点调度策略调度智能体节点接入网络: si(k)=「(k+1)pi+θi⎤-「kpi+θi⎤ i=1,2,…,N (2) Wi≥Wi* (3) 其中,Wi*为期望的平均传输速率. (4) 进一步,表示为: (5) 考虑到实际无线通信受到多径衰竭、遮蔽及发送器和接收器之间距离变化等因素的影响,理想的二进制通道模型往往是不存在的,故本文采用文献[20]中的接收概率以表征无线网络信道的通信质量,接收概率可定义为: (6) (7) 如图2所示,智能体节点i的邻接节点j为: Ni={i∈υ|(i,j)∈ε且dij≤dT} (8) 其中,dT={dij|P=PT},PT为接收概率的阈值.若dij>dT,则视为通信质量不可靠,舍弃相应的信息. 图2 智能体节点i的邻接节点jFig. 2 Adjacent agent j of agent i 注2 在第k个采样时刻,当且仅当(i,j)∈ε,dij≤dT,且si(k)=1时,智能体节点i才能与其远程控制器i及其邻接节点j通信。 注3 从智能体节点的连接权重(7)及邻接节点(8)的表示可以看出,随着智能体节点的运动,在不同的时刻其邻接节点可能是不同的,多智能体系统的拓扑结构也可能是变化的. 设计如下编队控制协议: (9) 其中,t∈[kh,(k+1)h),k1,k2为待设计值,xdi∈Rn,xdj∈Rn分别为期望的智能体节点i及其邻接智能体节点的位置信息.记C=diag{ci0},当智能体节点i与虚拟领导者之间存在通信链路,且ri0≤dT时,ci0≤ai0;否则ci0=0. 定义信息更新误差为: (10) 代入(4)式,得: (11) 根据式(1)和编队控制协议(9),智能体节点i可表示为: (12) 其中,t∈[kh,(k+1)h). 定义智能体节点i的编队误差: (13) 则(12)式可改写成: 其中,t∈[kh,(k+1)h). 记Mk=diag{1-si(k)},i=1,2,…,N, 则可得闭环多智能体系统: t∈[kh,(k+1)h) (15) t∈[kh,(k+1)h) (16) 简记为: t∈[kh,(k+1)h) (17) 综上所述,本文设计目标是针对无线网络通信具有的信道约束及不确定性,设计节点调度协议(2)和编队控制协议(9),使得闭环多智能体系统(17)渐近稳定. 定义1 若存在常数α>0和β>0使得状态响应满足‖x(t)‖≤αe-β(t-t0)‖x(t0)‖,∀t≥t0具有任意非负初始状态,则称系统指数稳定. (1)S<0 φT(t)(τ(t)HTR-1H-FTH-HTF)φ(t) 定理1 针对闭环多智能体系统(17),给定常数α>0,λ>0,对于第k个时间段及l=k-1个时间段,若存在一系列适维正定矩阵Pk,Qk,Yk,Hk,Rk,Pl,Ql,Yl,Hl,Rl,使得下列不等式成立: (18) Pk≤βPl,Qk≤βQl,Rk≤βRl,Yk≤βYl (19) (20) 其中,β≥1,γ=e-αh,G=Aε2+Bε4,J=GTRkG, 证明:令φ(t)=[zT(t),zT(t-τ(t)),zT(t-h),eT(t-τ(t))]T. 记εi(i=1,2,3,4)为块矩阵,且εij=εi-εj. (1)假设t∈(kh,(k+1)h)时,系统处于第k个时间段.构造Lyapunov-Krasovskii函数如下: (h-τ(t))[z(t)-z(t-h)]T· (21) 其中,V1(t)=zT(t)Pkz(t), V4(t)= (h-τ(t))[z(t)-z(t-h)]T· Hk[z(t)-z(t-h)], e-αhzT(t-h)Qkz(t-h)-αV2(t)+ [z(t)-z(t-h)]THk[z(t)-z(t-h)]+ Hk[z(t)-z(t-h)]+[z(t)-z(t-h)]T· (22) 由引理2,可得 (23) 由式(22)~(23)可知, (24) 其中, ∑=Γ+hJ+(h-τ(t))(∏1+∏2)+τ(t)(∏3+∏4).可见,∑是∏1+∏2和∏3在τ(t)∈[0,h]上的凸组合.因此,若(18)满足,则有∑<0,即: 对上式在t∈[tk,tk+1)=[kh,(k+1)h)上积分可得: Vk(t)≤e-α(t-tk)Vk(tk) (25) 从而可知Vp在第P个时间段内指数衰减. (2)对任意采样时刻tk=kh,根据不等式组(19),可知: (26) 因此,当t∈[tk,tk+1),由式(25)~(26)得: ≤e-α(t-tk)βe-α(tk-tk-1)Vk-1(tk-1)≤… ≤βδ(k)e-αδ(k)hV0(t0) (27) 根据式(19)有: 则λN(tk-t0)≤αδ2(k)h<αδ(k)h,代入式(27)得: Vk(t)<βδ(k)e-λN(tk-t0)V0(t0) 结合式(21),有: κ1‖z(t)‖2≤V(t)≤βδ(k)e-λN(t-t0)κ2‖z(t0)‖2,进一步可得: (28) (29) (30) 且智能体节点调度协议(2)满足式(3)及如下不等式: (31) 其中,C是智能体节点接入网络最多允许个数, 0<σ<1表示了智能体节点μ1k接入网络次数的渐近平均值,δ(k)为智能体系统接入网络的总次数,且: 则闭环多智能体系统(17)在具有介质访问受限及不确定性的无线通信下能够达到稳定编队. 证明:式(18)等价于 根据Schur补引理,则有: (32) (33) (34) (35) 由于-PR-1P≤ϑ2R-2ϑP,有: (36) 将式(36)代入式(34)~(35),即得式(29)~(30). 图3 多智能体系统通信拓扑图Fig. 3 Communication topology of multi-agent system 图4 期望的正方形编队队形Fig. 4 Expected square formation 图5 智能体节点的位置轨迹Fig. 5 Position trajectories of Agents 图6 智能体节点的速度轨迹Fig. 6 Velocity trajectories of Agents 图7 多智能体系统的位置响应Fig. 7 Position response of multi-agent system 图8 多智能体系统的速度响应Fig. 8 Velocity response of multi-agent system 图9 接入网络的智能体节点的数量Fig. 9 Number of agents accessed to network 图10 智能体节点接入网络的时序Fig. 10 Time sequences of agents accessed to network 上述多智能体系统的编队控制仿真结果如图5~图10所示.智能体节点的位置轨迹如图5的(a)、(b)所示,可见两个位置分量分别收敛并保持期望的距离.图6的(a)、(b)给出了智能体节点的速度轨迹,可见两个速度分量均保持一致.图7和图8分别为多智能体系统的位置和速度轨迹曲线,表明了随着时间推移,智能体节点的队形达到期望的正方形编队队形,且速度达到一致,并保持队形运动.根据本文设计的节点调度协议,图9表示接入网络的智能体节点的数量,可以看出任意时刻最多有3个智能体节点接入网络传输采样信息.图10给出了各个智能体节点在调度策略下的接入网络的时序,可见智能体节点在调度策略下间断性地传输信息,最终达到了稳定的编队.以上结果表明,在具有介质访问约束及不确定性的无线通信下,多智能体系统快速地形成期望的编队队形并保持该队形运动.为验证方法的有效性,本文仅采用了四个智能体节点进行编队分析,而对更多数量的多智能体系统,此方法同样有效. 本文针对无线网络环境下二阶多智能体系统的编队控制问题,考虑到网络的不确定性及介质访问约束,采用二进制序列设计智能体节点调度策略,并利用接收概率描述通信拓扑的连接权重,使得任意时刻传输状态信息的智能体节点数满足约束且达到稳定的编队队形.首先,通过定义信息更新误差及编队误差,将二阶多智能体系统模型转化为闭环延时系统模型.其次,利用Lyapunov-Krasovskii函数及LMI技术给出了二进制节点调度策略下编队控制协议的设计.最后,通过仿真验证了所提方法的有效性.本文后续工作是将进一步研究基于事件触发机制的无线网络通信协议以节省无线网络的带宽和能量,以及将该方法推广到高阶非线性多智能体的编队控制. 1 Wang J. Integratedoptimal formation control of multiple unmanned aerial vehicles.IEEETransactionsonControlSystemsTechnology, 2013,21(5):1731~1744 2 Oh K K, Ahn H S. Formation control of mobile agents based on distributed position estimation.IEEETransactionsonAutomaticControl, 2013,58(3):737~742 3 Park M C, Jeong K, Ahn H S. Formation stabilization and resizing based on the control of inter-agent distances.InternationalJournalofRobustandNonlinearControl, 2015,25(14):2532~2546 4 Oh K K, Ahn H S. Formation control and network localization via orientation alignment.IEEETransactionsonAutomaticControl, 2014,59(2):540~545 5 Travis D, Sarangapani J. Neural network output feedback control of robot formations.IEEETransactionsonSystemsMan&CyberneticsPartBCyberneticsAPublicationoftheIEEESystemsMan&CyberneticsSociety, 2010,40(2):383~399 6 Liu T, Jiang Z P. Distributed nonlinear control of mobile autonomous multi-agents.Automatica, 2014,50(4):1075~1086 7 Chen X, Jia Y. Adaptive leader-follower formation control of non-holonomic mobile robots using active vision.IetControlTheory&Applications, 2015,9(8):1302~1311. 8 Rahimi R, Abdollahi F, Naqshi K. Time-varying formation control of a collaborative heterogeneous multi agent system.Robotics&AutonomousSystems, 2014,62(12):1799~1805 9 Lu H, Zhou C. Dual scheduling and quantised control for networked control systems with communication constraints.InternationalJournalofSystemsScience, 2015,47(10):1~12 10 Xue D, Yao J, Wang J, et al. Formation control of multi-agent systems with stochastic switching topology and time-varying communication delays.IETControlTheory&Applications, 2013,7(13):1689~1698 11 Rahimi R, Abdollahi F, Naqshi K. Time-varying formation control of a collaborative heterogeneous multi agent system.Robotics&AutonomousSystems, 2014,62(12):1799~1805 12 Lu X, Austin F, Chen S. Formation control for second-order multi-agent systems with time-varying delays under directed topology.CommunicationsinNonlinearScience&NumericalSimulation, 2012,17(3):1382~1391. 13 He D X, Xu G H, Guan Z H, et al. Hybrid coordination of multi-agent networks with hierarchical leaders.CommunicationsinNonlinearScienceandNumericalSimulation, 2015,27(1):110~119 14 Dong L J, Chai S C, Zhang B H, et al. High-order tracking problem with a time-varying topology and communication delays.Neurocomputing, 2015, 149(23):1360~1369 15 Shang Y L. Continuous-time average consensus under dynamically changing topologies and multiple time-varying delays.AppliedMathematicsandcomputation, 2014,244(2):457~466 16 Li C, Qu Z, Weitnauer M A, et al. Distributed extremum seeking and formation control for nonholonomic mobile network.Systems&ControlLetters, 2015,75(75):27~34 17 Yan Y, Mostofi Y. Co-optimization of communication and motion planning of a robotic operation under resource constraints and in fading environments.IEEETransactionsonWirelessCommunications, 2013,12(4):1562~1572 18 Li H, Peng J, Liu W R, et al. A novel communication-aware formation control strategy for dynamical multi-agent systems.JournaloftheFranklinInstitute, 2015,352(9):3701~3715 19 Hajek B. Extremal splittings of point processes.MathematicsofOperationsResearch, 1985,10(4):543~556 20 Scaglione A, Goeckel D L, Laneman J N. Cooperativecommunications in mobile ad hoc networks.IEEESignalProcessingMagazine, 2006,23(5):18~29 21 Ji Z, Wang L, Xie G, et al. Linear matrix inequality approach to quadratic stabilization of switched systems.IEEProceedings-ControlTheoryandApplications, 2004,151(3):289~294 22 Zhang X M, Han Q L. Novel delay-derivative-dependent stability criteria using new bounding techniques.InternationalJournalofRobustandNonlinearControl, 2013,23(13):1419~1432. 23 王荣浩,邢建春,王平,王春明. 地面无人系统的多智能体协同控制研究综述. 动力学与控制学报, 2016,14(2):97~108 (Wang R H, Xing J C, Wang P, Wang C M. An overview on multi-agents cooperative control of unmanned ground system.JournalofDynamicsandControl, 2016,14(2):97~108 (in Chinese)) *The project supported by the National Natural Science Foundation of China(61074023) and Undergraduate innovation training projects of Jiangsu province † Corresponding author E-mail: njust_zc@126.com 20 April 2016,revised 23 June 2016. FORMATION CONTROL OF NETWORKED MULTI-AGENT SYSTEM WITH COMMUNICATION CONSTRAINS* Song Na Hong Xiaomin Zhou Chuan† (SchoolofAutomation,NanjingUniversityofScienceandTechnology,Nanjing210094,China) The formation control of second-order multi-agent system under wireless network with communication constrains and uncertainty is investigated in this paper. The binary sequence is used to design the agent scheduling protocol for the media access constrains in wireless network, where only the sampling information of the agents which satisfies the constraints is allowed to transmit through network. On the other hand, in order to build more realistic communication channel model, the wireless network metric is used to construct a new topology model rather than the traditional fixed interaction weights, which considers the uncertainties of wireless network and also the relationship between interaction weights and the distances among agents. Furthermore, the second-order multi-agent system model is transformed into close-loop system model with time-delay by defining information updating error and formation error. The formation control scheme is then designed by constructing Lyapunov- Krasovski function and taking advantage of LMI techniques. Finally, a simulation example illustrates the effectiveness of the proposed method. multi-agent system, formation control, wireless network, communication constraints, uncertainties *国家自然科学基金资助项目(61074023),江苏省大学生科研创新训练项目资助 10.6052/1672-6553-2016-032 2016-04-20收到第1稿,2016-06-23收到修改稿. † 通讯作者 E-mail: njust_zc@126.com













2 编队控制协议的设计

















3 算例仿真






4 结论