空间相机摆扫成像立体定位精度仿真分析
2017-07-03夏中秋黄巧林何红艳杨媛丽孙世君岳春宇
夏中秋,黄巧林,何红艳,杨媛丽,孙世君,岳春宇
1.北京空间机电研究所,北京 100094 2.中国空间技术研究院,北京 100094
空间相机摆扫成像立体定位精度仿真分析
夏中秋1,2,*,黄巧林1,2,何红艳1,2,杨媛丽1,2,孙世君1,2,岳春宇1,2
1.北京空间机电研究所,北京 100094 2.中国空间技术研究院,北京 100094
为了验证空间相机摆扫成像立体定位的可行性,考虑成像比例尺变化、摆扫角测量精度、摆扫角稳定度和摆扫角速度等影响因素,建立了以总体设计中影响定位精度的各指标为参数的空间相机摆扫成像几何模型,推导了基于误差传播理论的定位精度计算方法,并对平面定位精度和高程精度进行了仿真,提出了摆扫成像方式条件下提高定位精度的有效措施。结果表明,在成像幅宽较大时,单线阵摆扫成像线阵长度较小情况下和双线阵推扫成像线阵长度较大情况下,可达到相近的定位精度,提高摆扫角测量精度、摆扫角稳定度及时间同步精度,可提高平面定位精度。摆扫成像立体定位精度仿真方法适用于大幅宽成像遥感卫星定位精度指标分配。
摆扫成像;平面定位精度;高程精度;仿真分析;空间相机
近年来定位精度作为光学遥感卫星的重要指标已成为国内外卫星总体设计领域研究的热点,双线阵或三线阵相机推扫成像立体定位以其模型清晰、误差源较少等特点,得到了广泛应用[1-4]。许多研究利用物理意义明显的严格几何模型,分析了内、外方位元素误差对平面定位精度和高程精度的影响[5-7],在卫星发射前预估双线阵相机或三线阵相机推扫成像立体定位精度[8]。但随着卫星成像幅宽要求逐渐增大,推扫成像的线阵长度要求越来越长,通常需要将多片探测器进行拼接,由此引入了拼接误差[9],且线阵越长,保持线阵平行性越难[10],进而引起了定位精度下降,为了同时满足大幅宽成像和较小的线阵长度要求,可采用摆扫成像方式,摆扫成像时需考虑摆扫成像方式的特点和摆扫镜引起的误差[11-12],围绕空间相机摆扫成像立体定位精度预估的几何链路模型、定位精度计算方法和仿真分析还较少见到。
因此本文先对摆扫成像立体定位关键问题进行分析,然后以总体设计中影响定位精度的各指标为参数建立空间相机摆扫成像几何链路模型,提出以误差传播理论为基础的定位精度计算方法,并进行仿真,以实现对空间相机大幅宽摆扫成像立体定位精度的预估。最后分析各误差对摆扫成像立体定位精度的影响,并提出提高定位精度的有效措施。
1 摆扫成像立体定位关键问题分析
根据卫星总体设计中各技术指标,摆扫式成像立体定位与推扫式成像立体定位相同的误差源主要包括主点、主距和畸变的测量误差及稳定性精度,定轨精度,姿态测量精度,星敏感器低频漂移精度,卫星姿态稳定度及时间同步精度[13]。与推扫式成像立体定位不同,除上述误差源外,摆扫式成像立体定位还需考虑以下关键问题。
1.1 成像比例尺分析
在成像比例尺方面,推扫式成像时,在垂直摄影条件下,主距保持不变,航高保持不变,因此成像比例尺保持不变,如图1所示,若主距f为5 m,航高H为1 000 km,则成像比例尺为2×105。摆扫式成像时,线阵方向x沿卫星轨道速度方向X,随着扫描镜的旋转,视轴方向以卫星轨道速度方向为轴进行旋转,主距保持不变,航高逐渐增大,因此成像比例尺发生变化,如图2所示,若主距f为5 m,航高H为1 000 km,摆扫角度为15°,则在视场中心处成像比例尺为2×105,在视场边缘处成像比例尺为1.931 9×105,成像比例尺变化量为6 810,因此在构建摆扫式成像立体定位模型时,应考虑成像比例尺变化。
1.2 地球曲率分析

(1)
1.3 扫描镜旋转引起的误差
扫描镜旋转引起的误差是空间相机摆扫式成像立体定位精度的主要影响因素,在推扫式成像过程中,姿态确定在卫星姿态控制中的关系如图4所示[14],α为姿态指向误差,s为姿态稳定度,β为姿态测量误差,在定位精度分析时,须考虑姿态测量误差和姿态稳定度两个指标,同理,在摆扫式成像过程中,本文定义扫描镜旋转引起的误差如图5所示,s′为扫描镜摆扫角稳定度,β′为扫描镜摆扫角测量误差,在定位精度分析时,应考虑扫描镜摆扫角稳定度和摆扫角测量误差。此外,在建立空间相机摆扫成像立体定位模型时,还需考虑由摆扫速度和时间同步精度引起的摆扫角误差。
综上所述,空间相机摆扫式成像立体定位精度分析中,还须考虑成像比例尺的变化、扫描镜摆扫角稳定度和扫描镜摆扫角测量误差,因此有必要先构建空间相机摆扫成像立体定位模型。
2 摆扫成像立体定位模型建立
2.1 摆扫成像立体定位模型
空间相机摆扫成像过程中,传感器主距不变,任一像元成像,可等效于中心投影翻滚了摆扫角θ后,以中心点(x=0,y=0)成像的几何关系[15],则像点与地面点的几何关系可建立为
(2)

(3)
因此,式(2)和式(3)式共同构成了空间相机摆扫成像几何模型,根据该模型,可分别建立描述空间相机前后两次以一定交会角摆扫成像几何模型,然后利用点投影系数法,进行几何定位,计算方法如下
(4)
(5)
(6)
式中:X、Y、Z为地面点坐标;XS1、YS1、ZS1和XS2、YS2、ZS2为前后相机摄站位置坐标;BX、BY、BZ分别为摄影基线分量;N1和N2分别为前后相机的点投影系数;X1、Y1、Z1和X2、Y2、Z2分别为前后相机的像空间辅助坐标。其中
(7)
(8)
式中:f1和f2分别为前后相机的主距;a11、b11、c11、a12、b12、c12、a13、b13、c13为方向余弦,由前视相机的俯仰角φ1、翻滚角ω1、偏航角κ1确定;a21、b21、c21、a22、b22、c22、a23、b23、c23为方向余弦,由后视相机的俯仰角φ2、翻滚角ω2、偏航角κ2确定。通过分析可确定初始条件φ1=φ2=0°,ω1=ω2=θ,κ1=κ2=0°。
2.2 摆扫成像立体定位精度计算方法
根据系统误差和随机误差传播理论,定位精度估算方法如下:
(9)
式中:εf为主距系统误差;εXS、εYS、εZS为摄站位置的系统误差;εφ、εω、εκ分别为俯仰角、翻滚角和偏航角的系统误差;σf为主距的稳定性精度;σXS、σYS、σZS为摄站位置精度;σφ、σω、σκ分别为俯仰角、翻滚角和偏航角的稳定性精度。摄站位置精度计算方法为:
(10)
(11)
(12)
式中:σP定轨精度;σPt为时间同步误差和轨道速度引起的沿轨方向的摄站位置精度;V为轨道速度;σt为时间同步精度。考虑摆扫角稳定度和测量误差,卫星姿态精度计算方法为:
(13)
(14)
(15)
(16)
(17)
(18)

3 仿真分析
3.1 仿真方法与基本参数
利用空间相机摆扫式成像几何模型和推扫式成像几何模型[16],分别进行视场中心和视场边缘的定位精度仿真,为了使仿真结果具有对比性,摆扫式成像和推扫式成像中的各指标大小设置相同,基本参数列于表1。
3.2 仿真结果与分析
单线阵摆扫式成像和双线阵推扫式成像定位精度仿真结果列于表2中,可以看出,两种成像方式条件下,沿轨、垂轨、平面和高程精度相近,说明在成像幅宽较大时,单线阵摆扫成像线阵长度较小情况下和双线阵推扫成像线阵长度较大情况下,可达到相近的定位精度;在视场中心处,两种成像方式的沿轨、高程定位精度相同,摆扫式成像垂轨、平面定位精度较低,这是由于摆扫式成像在垂轨方向上多引入了摆扫角测量误差、摆扫角稳定度引起的姿态误差以及摆扫角速度和时间同步误差引起的姿态误差。推扫式成像时,与视场中心相比,视场边缘处的沿轨、垂轨、平面和高程精度均降低,摆扫式成像时,与视场中心相比,视场边缘处的垂轨和平面精度降低、沿轨和高程精度保持不变,为了分析这一现象,需计算误差传播系数,即地面点坐标X、Y、Z分别对f、XS、YS、ZS、φ、ω、κ的偏导数,误差传播系数的大小体现了定位精度受某个指标的影响程度。

表1 仿真基本参数

表2 仿真结果
在摆扫式成像视场中心和视场边缘处,分别计算了主距、摄站位置和姿态的沿轨、垂轨和高程误差传播系数,计算结果列于表3,可知对于沿轨坐标,翻滚角误差传播系数变大,但是数量级为10-12,对沿轨坐标定位影响极小,因此沿轨精度保持不变;对于垂轨坐标,主距误差传播系数增大,数量级为10-12,摄站沿轨位置误差传播系数增大,数量级为10-1,俯仰角误差传播系数增大,数量级为105,翻滚角误差传播系数增大,数量级为103,因此视场边缘处的定位精度比视场中心处的定位精度低;对于高程坐标,主距误差传播系数增大,数量级为10-11,翻滚角误差传播系数增大,数量级为10-11,因此高程精度保持不变。
3.3 提高摆扫成像定位精度的措施
为了提高空间相机摆扫式成像定位精度,可通过误差传播系数,分析可采取的有效措施。摆扫式成像获取立体图像,不同交会角条件下的误差传播系数如图6所示,视场中心处的误差传播系数如图6(a)(c)(e)所示,视场边缘处的误差传播系数如图6(b)(d)(f)所示。
可以发现,对于沿轨和垂轨坐标,无论是视场中心处还是视场边缘处,主距误差传播系数最小,数量级小于10-11,即主距误差1 μm引起的平面定位误差约为10-17m,摄站位置误差传播系数居中,数量级为10-1,即摄站位置误差1 m引起的平面定位误差约为0.1 m,姿态角误差传播系数最大,数量级为105,即姿态角误差为1″引起的平面定位误差约为0.484 8 m,因此摄站位置误差和姿态角误差对平面定位精度的影响较大,且俯仰角误差对沿轨定位精度的影响最大、翻滚角误差对垂轨定位精度的影响最大。
对于高程坐标,无论是视场中心处还是视场边缘处,主距误差传播系数最小,数量级为10-11,即主距误差1 μm引起的高程误差约为10-17m,摄站位置误差传播系数居中,数量级为100,即摄站位置误差1 m引起的高程误差约为1 m,姿态角误差传播系数最大,数量级为106,即姿态角误差1″引起的高程误差约为4.848 1 m,因此摄站位置误差和姿态角误差对高程精度的影响较大,且俯仰角误差对高程精度的影响最大。
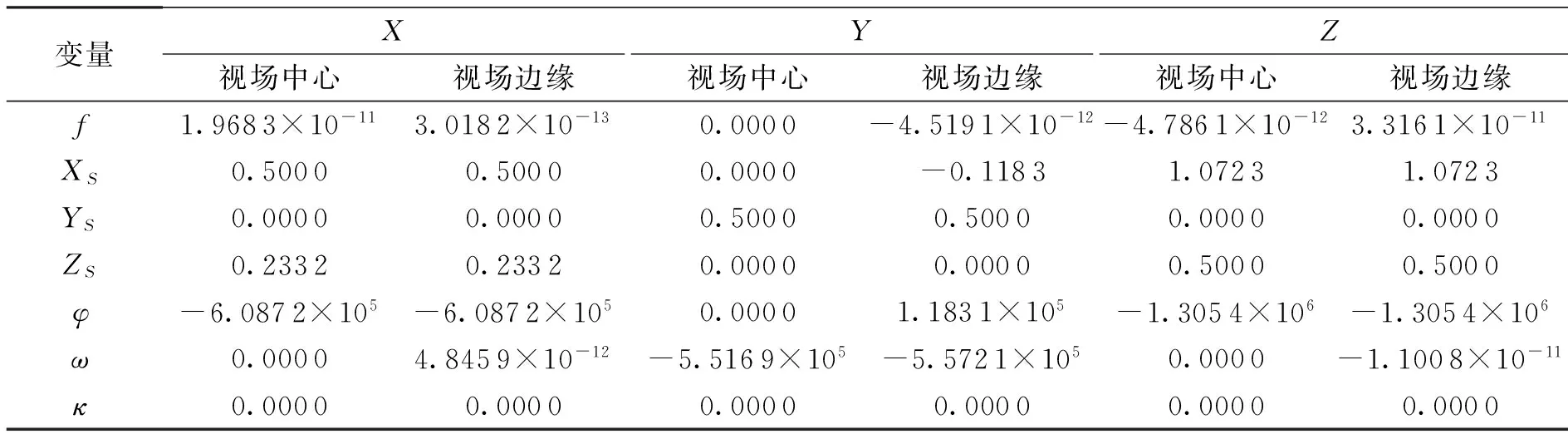
表3 误差传播系数
整体来说,平面定位精度随着交会角增大而降低,但下降幅度较小,若要提高平面定位精度,应主要从提高翻滚角精度方面考虑,相应提高摆扫角测量精度和摆扫角稳定度以及时间同步精度。高程精度随着交会角增大而增高,若要提高高程精度,应主要提高俯仰角精度,选择较小的俯仰角误差传播系数,因为俯仰角误差传播系数随交会角增大逐渐减小,且在约±25°时减到最小后趋于平稳,所以在摆扫式成像立体定位时,交会角可选择略大于±25°。
4 结束语
本文分析了摆扫成像立体定位的关键问题,建立了摆扫成像立体定位模型,并进行了定位精度仿真,针对主要环节提出相应措施,以提高摆扫成像立体定位精度。根据文中所取参数,得出以下结论:
1)在成像幅宽较大时,单线阵摆扫成像线阵长度较小情况下和双线阵推扫成像线阵长度较大情况下,可达到相近的定位精度。
2)单线阵摆扫成像时,与视场中心相比,视场边缘处的垂轨定位精度和平面定位精度降低、沿轨定位精度和高程精度保持不变。
3)俯仰角精度对沿轨定位精度的影响最大,翻滚角精度对垂轨定位精度的影响最大,提高摆扫角测量精度和摆扫角稳定度以及时间同步精度,可提高翻滚角精度,进而提高平面定位精度。
4)俯仰角精度对高程精度的影响最大,俯仰角误差传播系数随前后两次摆扫成像的交会角增大逐渐减小,且在约±25°时减到最小后趋于平稳,因此在摆扫成像立体定位时,交会角可选择略大于±25°。
References)
[1] 黄巧林, 姜伟. 高分辨率航天光学遥感器发展新思路研究[J]. 航天返回与遥感, 2007, 28(4): 48-50.
HUANG Q L,JIANG W.A study of the new direction of space-borne hi-resolution optical remote sensor[J]. Spacecraft Recovery & Remote Sensing, 2007, 28(4): 48-50(in Chinese).
[2] 唐新明, 谢俊峰, 张过. 测绘卫星技术总体发展和现状[J]. 航天返回与遥感, 2012, 33(3): 17-24.
TANG X M, XIE J F, ZHANG G. Development and status of mapping satellite technology[J]. Spacecraft Recovery & Remote Sensing, 2012, 33(3): 17-24(in Chinese).
[3] BOUILLON A, BERNARD M, GIGORD P, et al.SPOT 5 HRS geometric performances: using block adjustment as a key issue to improve quality of DEM generation[J]. ISPRS J. Photogramm. Remote Sens.,2006, 60: 134-146.
[4] ZHANG Y J, ZHENG M T, XIONG J X, et al. On-orbit geometric calibration of ZY-3 three-line array imagery with multistrip data sets[J]. IEEE Trans. Geosci. Remote Sens.,2014, 52(1), 224-234.
[5] 余俊鹏, 孙世君. 测绘相机内方位元素在对地定位中的误差传播[J]. 航天返回与遥感, 2010, 31(2): 16-22.
YU J P, SUN S J . Error propagation of interior orientation elements of surveying camera in ground positioning[J]. Spacecraft Recovery & Remote Sensing, 2010, 31(2): 16-22(in Chinese).
[6] 孙俊, 赵鸿志, 杨芳, 等. 敏捷卫星立体定位角元素影响分析[J]. 中国空间科学技术, 2014, 34(6): 72-78.
SUN J, ZHAO H Z, YANG F, et al. Analysis on attitude angle impacting stereo positioning accuracy for agility satellite[J]. Chinese Space Science and Technology, 2014, 34(6): 72-78(in Chinese).
[7] 李晨曦,张宇烽. 传输型测绘相机内方位元素误差对高程精度的影响分析[J]. 航天返回与遥感, 2010, 31(2):23-28.
LI C X, ZHANG Y F. Analysis of influences of real-time transmission mapping camera interior orientation error on elevation[J]. Spacecraft Recovery & Remote Sensing, 2010, 31(2):23-28(in Chinese).
[8] 胡莘, 曹喜滨. 三线阵立体测绘卫星的测绘精度分析[J]. 哈尔滨工业大学学报, 2008, 40(5):695-699.
HU X, CAO X B. Analysis on precision of stereo mapping microsatellite using three-line array CCD images[J]. Journal of Harbin Institute of Technology, 2008, 40(5): 695-699(in Chinese).
[9] 唐新明, 张过, 祝小勇, 等. 资源三号测绘卫星三线阵成像几何模型构建与精度初步验证[J]. 测绘学报, 2012, 41(2): 191-198.
TANG X M, ZHANG G, ZHU X Y, et a1. Triple linear-array imaging geometry model of Ziyuan-3 surveying satellite and its validation[J]. Acta Geodaetica et Cartographica Sinica, 2012, 41(2): 191-198(in Chinese).
[10] 岳丽清, 张继友, 伏瑞敏, 等. 三线阵相视轴夹角及线阵平行性装调测试[J]. 航天返回与遥感, 2012, 33(3):35-40.
YUE LQ, ZHANG J Y, FU R M, et al. Alignment method of axis angle and linear array parallelism for three-line array mapping camera[J]. Spacecraft Recovery & Remote Sensing, 2012, 33(3):35-40(in Chinese).
[11] 程少圆, 张丽, 高卫军, 等. 大视场空间相机侧摆成像时几何参数分析[J]. 红外与激光工程, 2015, 44(6):1872-1877.
CHENG S Y, ZHANG L, GAO W J, et al. Alignment geometric parameters analysis of large FOV space camera when rolling[J]. Infrared and Laser Engineering, 2015, 44(6):1872-1877(in Chinese).
[12] 苗壮, 何斌, 王俊琦, 等. 空间相机摆扫成像建模及摆镜角速度残差分析[J]. 航天返回与遥感, 2015, 36(6):39-47.
MIAO Z, HE B, WANG J Q, et al. Modeling of space camera for whiskbroom imaging and analysis of pendulum mirror angular velocity residual[J]. Spacecraft Recovery & Remote Sensing, 2015, 36(6):39-47(in Chinese).
[13] 金涛, 李贞, 李婷, 等. 提高光学遥感卫星图像几何精度总体设计分析[J]. 宇航学报, 2013, 34(8): 1160-1165.
JIN T, LI Z, LI T, et al. System design and analysis for improving geometric accuracy of high-resolution optical remote sensing satellite image[J]. Journal of Astronautics, 2013, 34(8): 1160-1165(in Chinese).
[14] 吕振铎, 雷拥军. 卫星姿态测量与确定[M]. 北京: 国防工业出版社, 2013.
LYU Z D, LEI Y J. Satellite attitude measurement and Determination[M]. Beijing: National Defense Industry Press, 2013(in Chinese).
[15] 孙家柄. 遥感原理与应用[M]. 武汉: 武汉大学出版社,2013.
SUN J B. Principles and applications of remote sensing[M]. Wuhan: Wuhan University Press, 2013(in Chinese).
[16] 夏中秋, 黄巧林, 何红艳, 等. 高分辨率光学遥感卫星几何链路定位精度分析[J]. 航天返回与遥感, 2016, 37(3): 111-119.
XIA Z Q, HUANG Q L, HE H Y, et al. Analysis of geolocation accuracy of high resolution optical remote sensing satellite geometric chain[J]. Spacecraft Recovery & Remote Sensing, 2016, 37(3): 111-119(in Chinese).
(编辑:高珍)
Simulation and analysis of stereo geolocation accuracy of space camera by whisk broom imaging
XIA Zhongqiu1,2,*,HUANG Qiaolin1,2,HE Hongyan1,2,YANG Yuanli1,2,SUN Shijun1,2,YUE Chunyu1,2
1.BeijingInstituteofSpaceMechanics&Electricity,Beijing100094,China2.ChinaAcademyofSpaceTechnology,Beijing100094,China
To verify the feasibility of the geolocation of space camera by the whisk broom imaging, the geometric model of space camera by whisk broom imaging was built concerning the change of the image scale, the whisk angle measurement accuracy, the whisk angle stability and the whisk angular velocity,taking the factors of geolocation accuracy in the overall design as the parameters. The geolocation accuracy algorithm based on the error propagation theory was derived, the simulation was carried out and the improving method was put forward. The results show that the geolocation accuracy of the large width imagery is similar between the smaller linear length by the whisk broom imaging and the longer linear length by the push broom imaging. Improving the whisk angle measurement accuracy, the whisk angle stability and the time synchronization accuracy can improve the plane geolocation accuracy. The simulation method of the geolocation accuracy of space camera by whisk broom imaging is applicable to the index assignment of the large width imagery of the remote sensing satellite.
whisk broom imaging;plane geolocation accuracy;height accuracy;simulation analysis;space camera
10.16708/j.cnki.1000-758X.2017.0061
2017-02-15;
2017-03-10;录用日期:2017-05-18;网络出版时间:2017-05-31 10:55:14
http:∥kns.cnki.net/kcms/detail/11.1859.V.20170531.1055.008.html
夏中秋,黄巧林,何红艳,等.空间相机摆扫成像立体定位精度仿真分析[J].中国空间科学技术, 2017,37(3):
117-125.XIAZQ,HUANGQL,HEHY,etal.Simulationandanalysisofstereogeolocationaccuracyofspacecamerabywhiskbroomimaging[J].ChineseSpaceScienceandTechnology, 2017,37(3):117-125(inChinese).
P228.1
A
http:∥zgkj.cast.cn
*通讯作者:夏中秋(1985-),男,博士研究生,xiazhongqiu@hotmail.com,研究方向为空间光学遥感器总体设计
