基于SIFT的全景图像拼接方法研究
2017-06-30岳昕
摘 要:全景图像拼接主要解决由于普通成像设备视角限制,难以拍摄到高分辨率大视场图像的问题。本文以具有平移、旋转、尺度变换、视角变换及复杂变化的图像作为研究对象,借助经典SIFT算法的良好鲁棒性,设计了针对序列图像的SIFT配准方法,并进行了实验验证。实验结果表明:改进后的算法不仅能缩短拼接时间,还具有较高的正确匹配率。
关键词:全景图像 拼接 改进 意义
中图分类号:TP391 文献标识码:A 文章编号:1003-9082(2017)06-0001-01
一、基于SIFT的全景图像拼接的研究意义
全景图像拼接是指把一系列拥有重叠区域的局部图像通过图像配准、图像变换和图像融合拼合成一大幅高清晰并且无明显接缝的全局图像。其能够很好地解决成像场景的视角范围与分辨率间难以共存的问题,被广泛地应用在碎片图像合成、虚拟现实等领域[1]。
然而,用于拼接的图像间仅有一部分重叠区域,特征匹配对也只会在这个重叠区域内建立,与重叠区域外特征点匹配只会增加建立错误匹配对的可能并增加匹配时间。针对现有的因提取整幅图像特征而导致算法计算量大、非重叠区域特征容易造成后续匹配错误和计算冗余等问题,设计了本文的算法,以求在降低匹配计算量的同时有效降低误匹配率。
二、基于SIFT的全景图像拼接算法改进
由于SIFT特征性能卓越,在图像发生平移、旋转、缩放、亮度变化时能保持良好不变性,且对视角变化、仿射变换、噪声也保持一定程度的稳定性,所以通用性很强。但SIFT特征应用于图像拼接时存在大量冗余,导致运算量大,并且在非重叠区域的特征点容易出现匹配错误[2]。而用于提纯匹配点的RANSAC算法是以每次随机抽取初步匹配点样本来计算模型参数,以至于会导致迭代次数偏多,带来运算量偏大大的问题。
基于以上考虑,本文设计的改进算法的执行步骤如下:
1.首先将两幅拥有重叠区域的序列图像I1和I2分别提取SIFT特征点;
2.在图像中I1,选取与图像I2相邻的边缘区域(文中设定边缘区域宽为200像素)内的SIFT特征点,跟图像I2中的特征点建立匹配对,然后记录在图像I2中对应点,进行直线拟合得到直线I1,这样直线I1将图像I2分成了两块区域,与图像边缘围成的区域就是初始重叠区域H1;
3.用同样的方法反向匹配,在图像I1中获得对应直线I2和初始的重叠区域H2;
4.最后仅在建立的初始重叠区域H1和H2中寻找匹配对,建立两幅图像的对应关系(参数变换模型)。
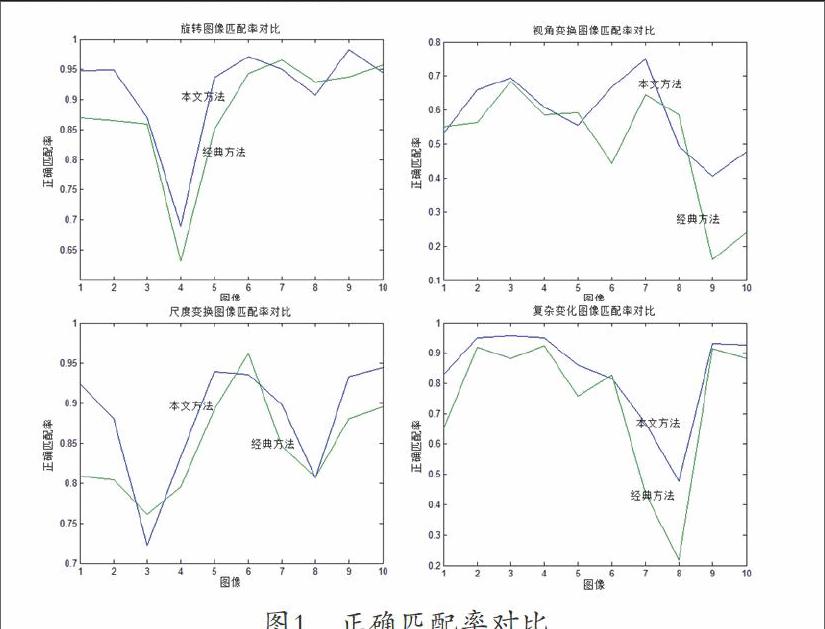
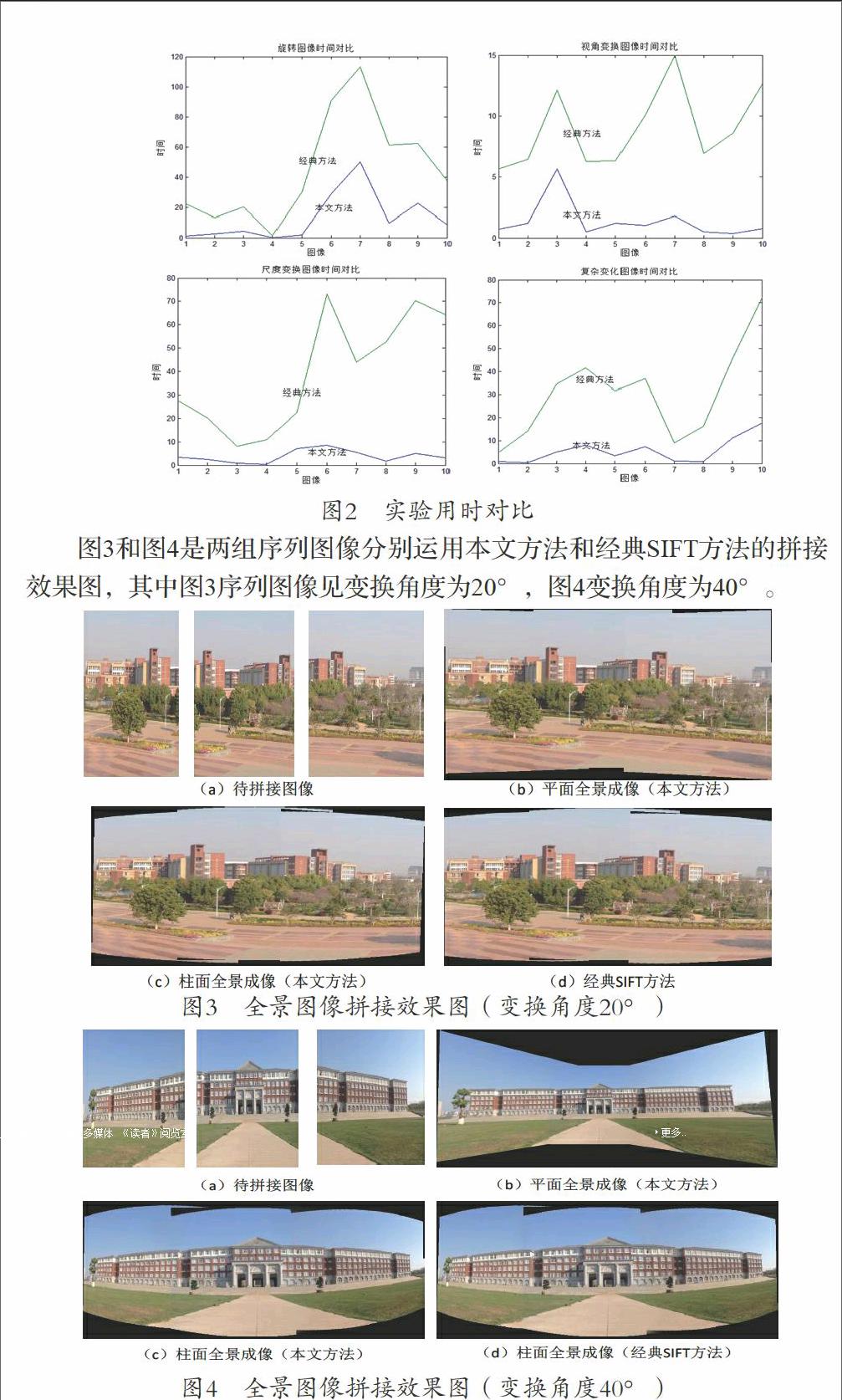
为进一步验证改进方法,分别选取了具有旋转、视角变换、尺度变换和复杂变换的图像对各10组进行正确匹配率(图1)和实验用时(图2)对比实验,结果证明:本文算法正确匹配率上略优于经典SIFT匹配算法,在实验用时上有大幅度提升。
图3和图4是两组序列图像分别运用本文方法和经典SIFT方法的拼接效果图,其中图3序列图像见变换角度为20°,图4变换角度为40°。
三、总结
本文分析了使用SIFT算法进行图像配准的优劣,并在此基础上針对其匹配精度高鲁棒性好而运算耗时较长的优劣性设计了基于SIFT的三次匹配算法,其中以前两次匹配结果粗略定位相邻图像的重叠区域,最后一次匹配仅在定位的重叠区域内完成。实验证明该方法具有较经典SIFT配准相当或更高的正确匹配率,并能大幅缩短匹配耗时。
参考文献
[1]岳昕.基于SIFT的全景图像拼接方法研究[D].昆明理工大学,2015.
[2]Zhao Lei, Hou Zhenjie. Improved Image Registration Method of SIFT. Computer Engineering, 2010, 36(12):226-228+
