中高频大振幅垂向振动下的坐姿人体7自由度建模及实验
2017-06-28梁世豪
梁世豪,黄 煜
(上海交通大学 机械与动力工程学院 机械系统与振动国家重点实验室,振动、冲击、噪声研究所,上海 200240)
中高频大振幅垂向振动下的坐姿人体7自由度建模及实验
梁世豪,黄 煜
(上海交通大学 机械与动力工程学院 机械系统与振动国家重点实验室,振动、冲击、噪声研究所,上海 200240)
建立合适的人体振动模型,预测人体在不同振动环境下的动力学响应和各部位振动的传递性,能够对建筑和交通工具内部的振动控制起到指导作用。到目前为止,大多数垂直振动下的人体多自由度模型都是针对较低频率(<20 Hz)和较小幅度(<1.5 ms-2)的振动环境,未必适用于较高频率(>20 Hz)和较大幅度(>1.5 ms-2)的垂向振动环境。为了准确地预测坐姿人体对中高频、大振幅垂向振动的动力学响应,建立垂向振动下坐姿人体的7自由度修正模型,并通过实验测试25名志愿者在4种不同加速度幅值(1.0 m/s2、1.5 m/s2、2.0 m/s2、2.5 m/s2)的宽带随机(2~100 Hz)垂向振动下的视在质量。实验结果表明,相比ISO标准规定的3自由度模型,所提出的7自由度修正模型能较准确地预测坐姿人体对大振幅垂向振动的动力学响应。
振动与波;人体;垂向振动;生物动力学;视在质量
人们在驾驶和乘坐汽车、地铁等日常交通工具,或者在操纵挖掘机、打桩机、装甲车等重型机械或车辆时,会持续暴露在不同强度和类型的振动环境中。随着振动幅度的增大,人们的阅读、书写、交谈、驾驶、瞄准等各项表现会受到负面影响。当振动强度增加到一定限度,不仅影响人的心理和生理,而且会产生病理性损伤,超过极限阈的振动将使感受器和神经系统产生永久性病变,即使振动停止也不能复原[1]。例如,暴露在大幅度的振动下,人们会出现冷汗、恶心、皮肤发凉等症状,长期累积会形成振动性血管神经病、白手指病等职业振动病[2]。
研究不同频率和幅度的振动对人体的影响规律,包括人体的生物动力学响应和主观反应规律,是正确评价、预测和减小振动危害的基础,对于我国振动相关的法律法规的制订,以及交通工具、重型机械和特种车辆的减振设计,都是极其迫切和重要的。其中,从生物动力学的角度分析人体对振动的响应,建立合理的人体振动模型,可以为人体振动评价提供基础[3]。利用建立的生物动力学模型,可以对幅度、频率等变量对人体的影响进行预测,进而为工程中减振系统的优化设计提供必要的指导信息。
坐姿人体的生物动力学响应可以通过人体的视在质量(Apparent Mass,AM)、机械阻抗和振动的传递性等参数来描述。人体的视在质量M(f)定义为输出动态力F(f)和座椅-人体接触面的输入加速度的a(f)的复数比;人体的机械阻抗Z(f)定义为F(f)和座椅-人体接触面的输入速度v(f)的复数比;人体振动的传递性T(f)定义为人体任意两点之间的振动幅值(加速度a(f),速度v(f)或位移d(f))之比,其中f是频率。
从上世纪60年代开始,研究者建立了各种模型,来预测人体对振动的生物动力学响应。根据建模技术的不同,模型大致可分为三类:集中参数模型(Lumped-Parameter Model)、多体模型(Multibody model)和有限元模型(Finite Element Model)。集中参数模型将人体看成由数个质量集中的刚体构成,相互之间以弹簧和阻尼相连。例如60年代Coermann在测量人体的机械阻抗时提出的单自由度模型[4],之后Suggs等提出的2自由度模型[5],Muksian和Nash提出的6自由度模型[6],以及Patil等提出的7自由度模型[7]等均属于集中参数模型。多体模型也是由多个刚体构成,但其相互之间以球铰等三维结构连接,常用于人体锻炼和车祸受伤评估,以及接触力的分析等[8]。有限元模型假设人体是由大量质元构成,通过定义质元的物理参数来分析人体对振动的响应以及振动引起的人体损伤,例如Low和Prasad就使用了一个Madymo侧向冲击的有限元模型来研究人体在冲击下的响应[9]。
在上述三类模型中,对于集中参数模型的研究最为广泛,已经提出的模型复杂程度不一,从单自由度到11自由度都有[4–6,10–12]。其中国际标准ISO 5892-2001中就采用了3自由度模型来描述垂直振动下坐姿人体的视在质量和机械阻抗[10],而更高自由度的模型则可以进一步研究人体不同部位的振动传递性。例如Muksin和Nash等提出的六自由度模型[6]详细考虑了人体内部的主动力及非线性元素,但是添加了主动力之后的视在质量曲线拟合度大幅下降。Patil等在Muksin和Nash的6自由度模型的基础上,忽略人体的内部主动力,提出了7自由度模型,其预测结果与实验曲线较为接近[7]。Qassem等将Patil等的模型进一步细分为11个部件,并且忽略了非线性因素[11]。
然而,这些研究绝大多数都是针对频率在20 Hz以下、振幅小于1.5 m/s2的垂直振动。当振动频率较低时,人体各部分的运动接近同步;随着振动频率的提高,振动的传递性在身体各部分出现差异[6]。同时,人体的视在质量相对于振幅存在非线性,例如Zhou和Griffin研究了1 Hz~16 Hz的正弦垂直振动下的坐姿人体,发现当振幅从0.1 m/s2增大到1.6 m/s2时,人体的视在质量逐渐减小,共振频率从6.5 Hz减小到4.5 Hz[13]。
在一些工作环境下,例如装甲车、打桩机等特种车辆和机械内部,人体会经常暴露在较高频率和较大幅度的垂直振动中,因此,有必要研究20 Hz以上频率,1.5 m/s2以上振幅的垂直振动环境下的坐姿人体的生物动力学响应。考虑到Patil的7自由度模型能较好地预测20 Hz以下垂直振动下的人体响应[7],本文拟基于Patil的7自由度模型[7],忽略掉其中的非线性因素,对模型参数进行修正,得到适合于较高频率和较大振幅下的垂直振动的坐姿人体的生物动力学模型,并通过实验进行验证。
1 坐姿人体的7自由度建模
1.1 动力学方程
基于振动环境和生理结构的综合考虑[5],将座椅上的坐姿人体分为头部、背部、躯干、胸腔、膈、腹部和骨盆7个部分,不考虑前后和侧向振动的影响,将人体简化为如图1所示的7自由度模型。该模型的动力学参数主要有以下几个:m1、m2、m3、m4、m5、m6和m7分别表示骨盆、腹部、膈、胸腔、躯干、背部和头部的质量,单位为kg;k1、k2、k3、k4、k5、k6和k7分别表示上述人体各部分的刚度,单位为kN/m;c1、c2、c3、c4、c5、c6和c7分别表示上述人体各部分的阻尼,单位为Ns/m;z1、z2、z3、z4、z5、z6和z7分别表示上述人体各部分重心的位移,单位为m;z0表示输入的位移激励,单位为m,m0表示座椅质量,单位为kg。
建立系统的动力学方程如下
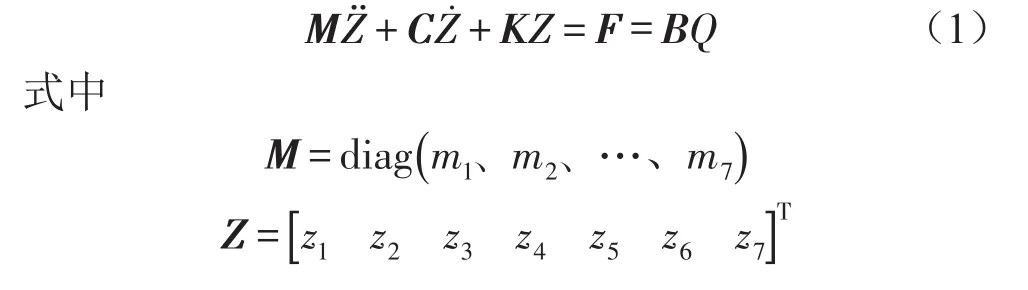
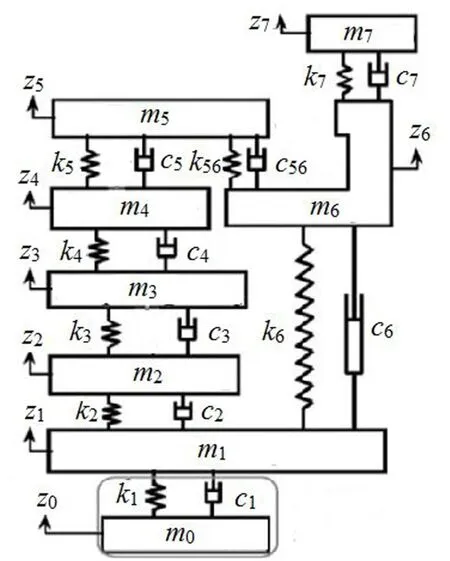
图1 垂直振动环境下的坐姿人体7自由度模型
对式(1)进行傅里叶变换,得

式中A=-ω2M+jωC+K,则

从式(3)得到人体响应的传递函数矩阵

根据视在质量的定义,从式(2)得到视在质量表达式
在实际测量中,视在质量通常通过下式得到,即

其中GFa(ω)和Gaa(ω)分别为力和加速度的互功率谱与加速度的自功率谱。
1.2 动力学模型的参数识别
Patil等的7自由度模型中包涵了非线性因素,所以原模型的参数在这里并不适用。考虑人体解剖学和生物力学中人体各部分结构的参数[6–7],以Abbas等通过遗传算法优化得到的参数为初值进行迭代优化,其参数如表1所示[14]。
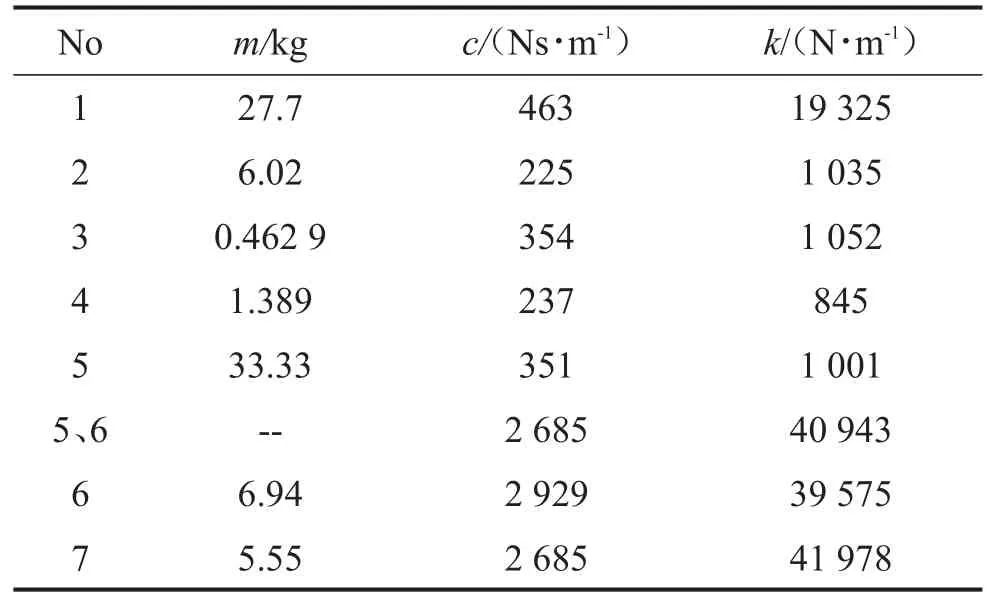
表1 遗传算法得到的7自由度模型参数(引自Abbas等[14])
将表1中的参数代入7自由度模型,得到0~100 Hz下的视在质量曲线,如图2所示。
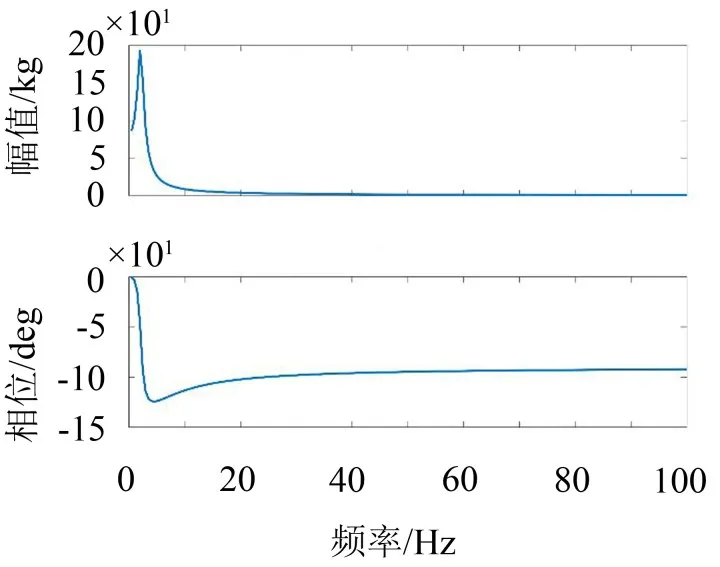
图2 基于7自由度模型的视在质量幅值和相位
将图2的视在质量曲线同ISO 5982中基于3自由度模型的视在质量曲线[10]进行比较,发现差别较大:起始点,即接近0 Hz时的幅值不同;主共振峰的频率不同,ISO 5982中的共振频率为4.40 Hz,而图2中的共振频率为2.10 Hz;共振频率处的视在质量极大值不同,ISO 5982中的峰值在75 kg~80 kg,而图2中的峰值接近200 kg。
可以通过拟合度系数ε,即
来计算实验和仿真曲线之间的拟合度[13],其中τm为实验数据,τc为仿真模型计算的结果,N为数据点数。
根据ISO 5982中0.5 Hz~20 Hz的实验数据[10]和图2中的仿真曲线数据,通过式(7)得到的拟合度ε=23.36%。仿真和实验曲线的差异较大,需要对模型参数进行进一步优化。
Qassem等在1996年提出了一个11自由度模型来描述坐姿男性的垂向及水平振动的动力学特性,将该模型中的各部分质量均乘以0.6的比例系数,而保持各部分刚度和阻尼系数不变,用来描述坐姿女性的振动特性[11]。类似Qassem等的方法,假设模型内部M、K、C矩阵中各参数之间的相对比值不随外界激励的变化而改变,对M、K、C矩阵分别乘以一个比例系数,以拟合度为优化目标进行优化。一般地,M矩阵同共振频率负相关,与峰值正相关,并且决定起始点;C矩阵与峰值负相关,几乎不会影响共振频率,不影响起始点;K矩阵与共振频率正相关,与峰值正相关,不影响起始点。因此先调整M,使起始位置满足条件;再调整K,使共振频率满足条件;最后调整C,使峰值满足条件。
最终的优化参数为0.61M,2.7C和2.65K,此时视在质量曲线的起始位置、共振频率和峰值同标准曲线非常相近,拟合度为90.53%。优化后的视在质量曲线如图3所示。
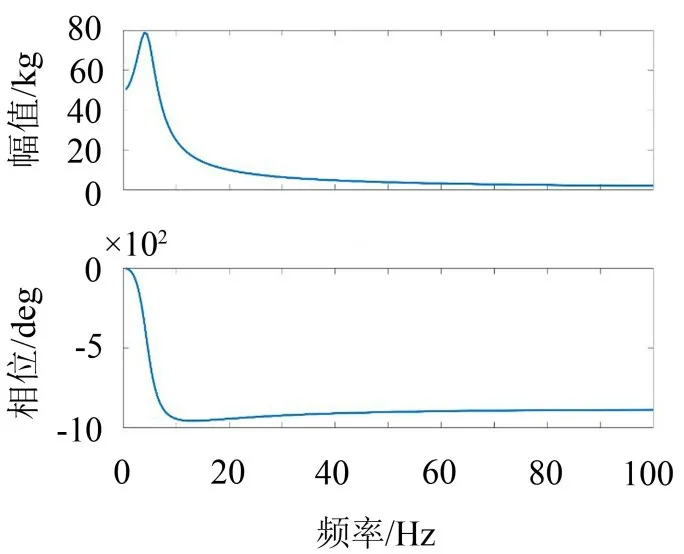
图3 优化后的视在质量曲线
研究发现人体的弹性和阻尼系数会随着振动频率的变化而变化[6],在建模时,如果只将人体静止时的各项参数代入模型,则无法反映振动过程中人体各项参数的动态变化,其模型的预测结果同实际结果可能会有较大偏差。因此,经过优化之后的K和C,相当于实验频率范围内的“等效值”,而M阵的优化则反映了人群质量的差异。
2 垂直振动下的坐姿人体的动力学响应实验
2.1 实验设备
实验中用到的仪器设备主要有:铝合金刚性座椅支架(尺寸683 mm×480 mm×1 110 mm,带靠背和扶手),电液伺服振动台,测力台,加速度传感器。测力台通过螺栓安装在座椅支架上,通过12通道振动声学系统数据采集分析仪和笔记本电脑采集和控制力和加速度信号。
2.2 受测者信息
实验志愿者共25人,其中13名男性,12名女性,均为上海交通大学在校学生,年龄为18~28岁(中值21岁)。男性受测者的身高为165 cm~180 cm(中值176 cm),体重为60 kg~100 kg(中值66 kg);女性受测者的身高为158 cm~173 cm(中值160 cm),体重为43 kg~65 kg(中值49 kg)。
2.3 振动激励
实验采用2 Hz~100 Hz的宽带随机垂直振动加速度激励,共有4种不同的加速度幅值,分别为1.0 m/s2、1.5 m/s2、2.0 m/s2和2.5 m/s2,每次输入激励的持续时间为20 s。
2.4 实验步骤
实验要求受测者保持自然放松的端坐姿势,坐在安装于座椅支架的测力台上,目视前方,背部不与座椅靠背接触,双手平放在大腿上,膝关节尽量保持垂直,双脚与振动台接触,如图4所示。
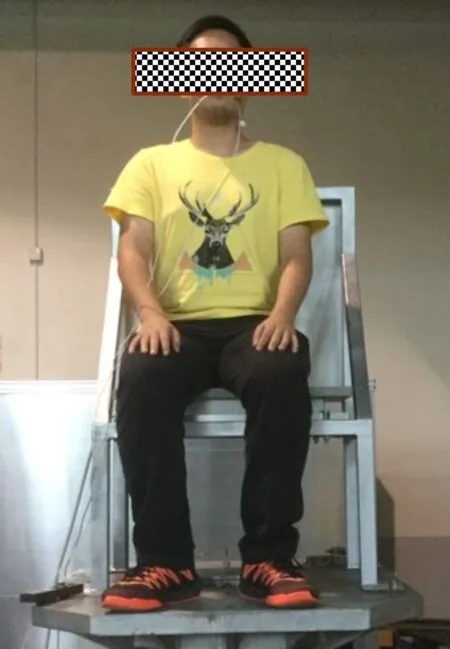
图4 受测者端坐在测力台上
每位受测者均经历4种不同幅度的垂直振动激励,每次激励的持续时间为20 s。4组激励的输入顺序是随机的。
2.5 数据分析方法
实验中,视在质量通过下式得到
其中AM(f)为频率f处的视在质量,Saf(f)为受测者与座椅接触部位的垂向加速度与垂向力的互功率谱,Saa(f)为受测者与座椅接触部位垂向加速度的自功率谱。频率分辨率为0.5 Hz。
3 实验结果
图5为在1 m/s2的垂直随机振动激励下的25名受测者(包括13名男性,12名女性)的视在质量曲线。可以看出视在质量的主共振峰均在5 Hz附近,其中男性受测者的视在质量曲线的主共振频率处于4 Hz~8.5 Hz,女性受测者的主共振频率处于4 Hz~7.5 Hz。
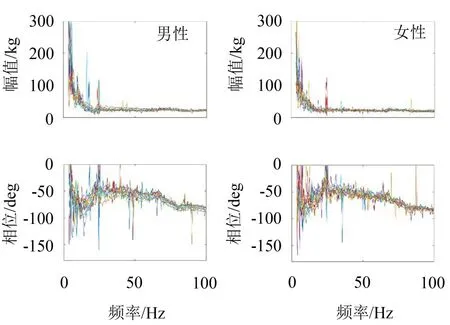
图5 25名受测者的视在质量曲线(1 m/s2,2Hz~100 Hz)
图6为4种不同幅度的垂直振动加速度下,25名受测者的视在质量幅值和相位的中位数曲线。
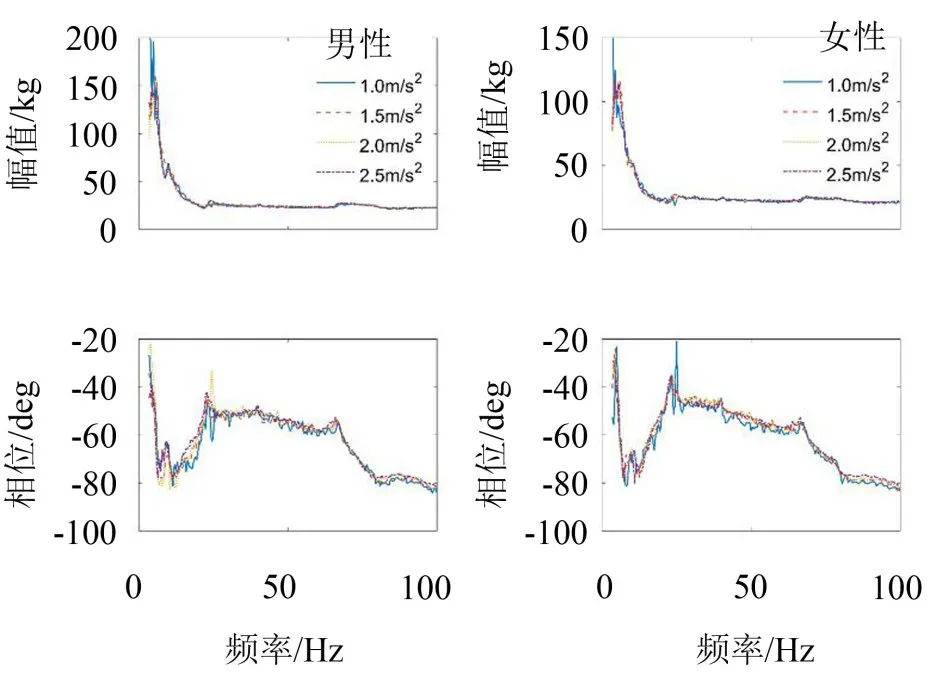
图6 4种不同幅值加速度下视在质量幅值和相位的中位数曲线
图7是不同加速度下25名受测者的主共振频率中位数和四分位值。表2是不同加速度下25名受测者的主共振频率及峰值中位数。
从图6可见15 Hz~20 Hz及80 Hz~100 Hz范围内,振动加速度对相位的影响较为明显,随着加速度的增大,相位滞后减少;在其余频段内,不同加速度下的相位曲线基本重合。
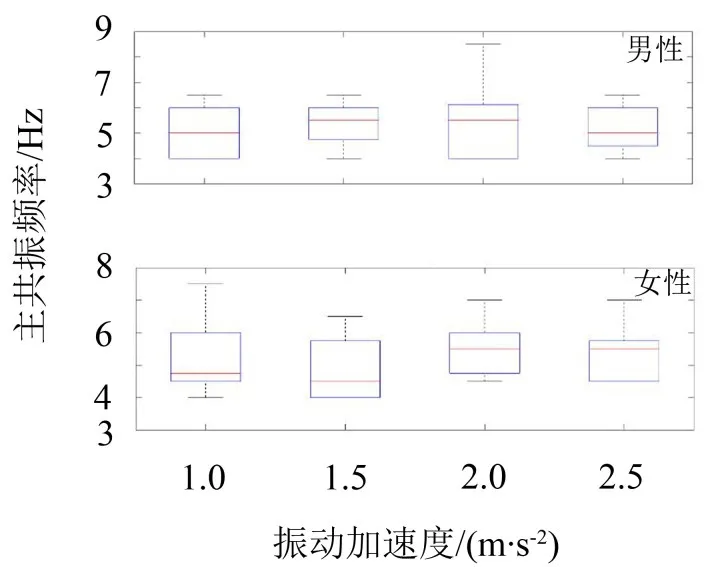
图7 4种不同幅值加速度下视在质量主共振频率的中位数和四分位值
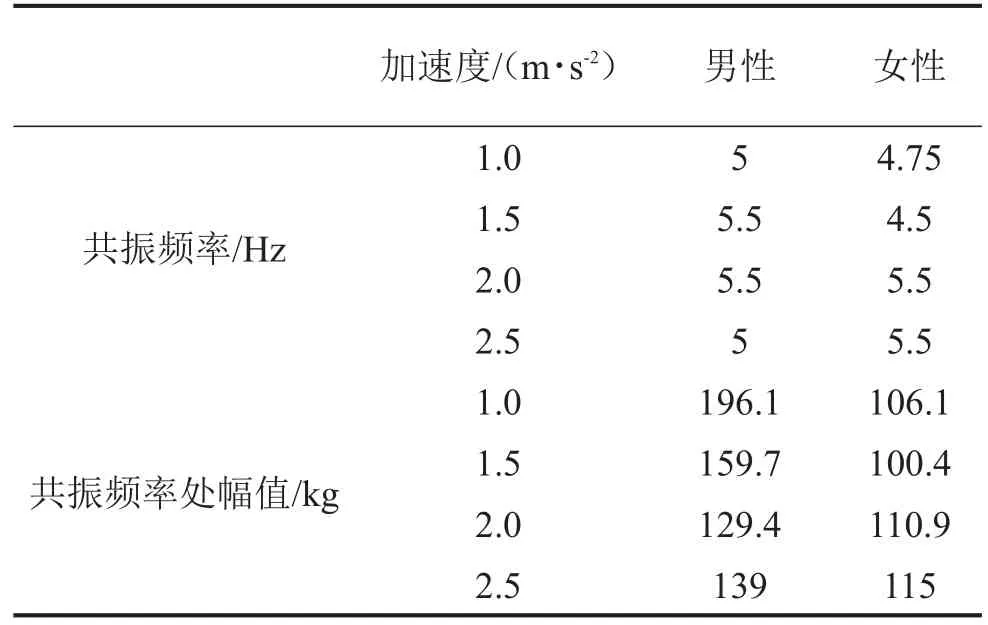
表2 不同加速度下25名受测者的主共振频率及峰值中位数
当振动加速度幅值从1.5 m/s2增大到2.5 m/s2,主共振频率没有显著的变化趋势(男性p=0.61,女性p=0.23,Friedman检验)。当振动加速度幅值从1.5 m/s2增大到2.5 m/s2,男性主共振频率处的视在质量显著减小(p<0.01,Friedman检验),女性主共振频率处的视在质量显著增大(p<0.01,Friedman检验)。
4 讨论
4.1 基于实验结果的模型参数识别
将实验测得的视在质量代入7自由度模型中,利用利用Matlab的fmincon函数进行参数识别,获得不同激励条件下模型的M、K、C参数。目标误差函数为E(f),由下式计算得到

Mcomp(f)为模型计算得到的频率f处的视在质量幅值,Mexp(f)为实验测得的频率为f处的视在质量幅值。
实验测得的视在质量中位数曲线和模型预测的视在质量曲线如图8所示。
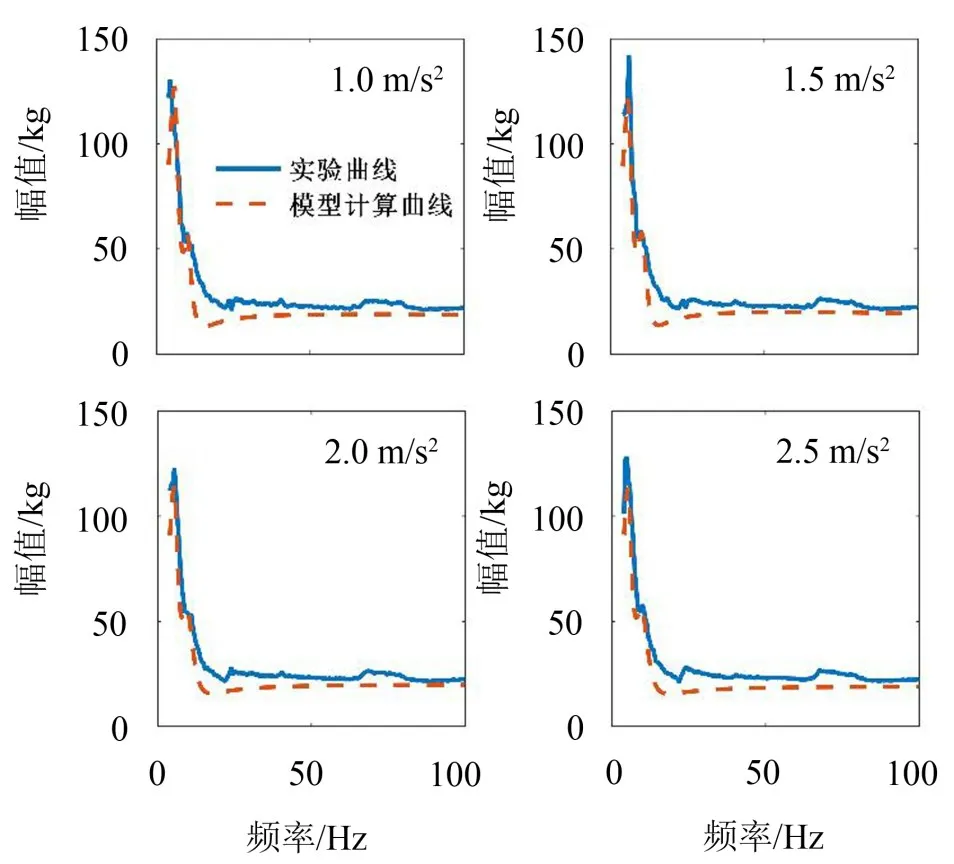
图8 4种不同幅值加速度下实验的视在质量中位数曲线和模型曲线的对比图
根据实验结果中视在质量的中位数曲线,将模型的质量约束在55 kg~65 kg的范围内。将实验测得的视在质量幅值中位数曲线数据代入七自由度模型中,通过参数识别,得到不同振动加速度下的M、K、C,如表3所示。
随着振动加速度的增大,7自由度模型中的阻尼c6和c7(背部-骨盆、头部-骨盆处连接处)显著增大(p<0.01,Friedman检验),其余部分的阻尼基本保持不变(p>0.05,Friedman检验)。随着振动加速度的增大,模型中的刚度k2(腹部-骨盆连接处)显著减小(p<0.01,Friedman检验),k6和k7(背部-骨盆、头部-骨盆处连接处)显著增大(p<0.01,Friedman检验),其余刚度阵没有明显变化(p>0.05,Friedman检验)。
4.2 视在质量曲线的非线性
实验测得的视在质量曲线没有表现出其他文献中提出的非线性现象[11]。随着振动加速度从1 m/s2增加至2.5 m/s2,视在质量的主共振频率并没有显著变化。原因可能与采用的振动加速度幅值和频率范围有关:在其他发现非线性的实验中,所采用的振动加速度均小于1.6 m/s2,频率范围在0.5 Hz~20 Hz;而本实验中的激励采用了较大幅值(1 m/s2~2.5 m/s2)和较高频率的随机振动(0.2 Hz~100 Hz)。
Fairley和Griffin,以及Zhou和Griffin等[13,15]基于单自由度模型的参数识别结果,对垂直振动下视在质量的非线性机理进行了研究,发现模型的刚度和阻尼都随着振动加速度的增大而减小,从而造成了主共振频率的减小,文献中将这一现象称为“模型软化”。但是本文采用7自由度模型,模型参数较多,随着振动加速度的增大,模型各部分的刚度和阻尼参数的变化较为复杂:刚度k2减小,k6和k7增大,其余保持不变;阻尼的变化也与Fairley和Zhou的完全相反,文中的c7和c8显著增加,其余保持不变。因此在7自由度模型里,视在质量曲线的主共振频率变化并未呈现出随振动幅值变化的非线性结果。
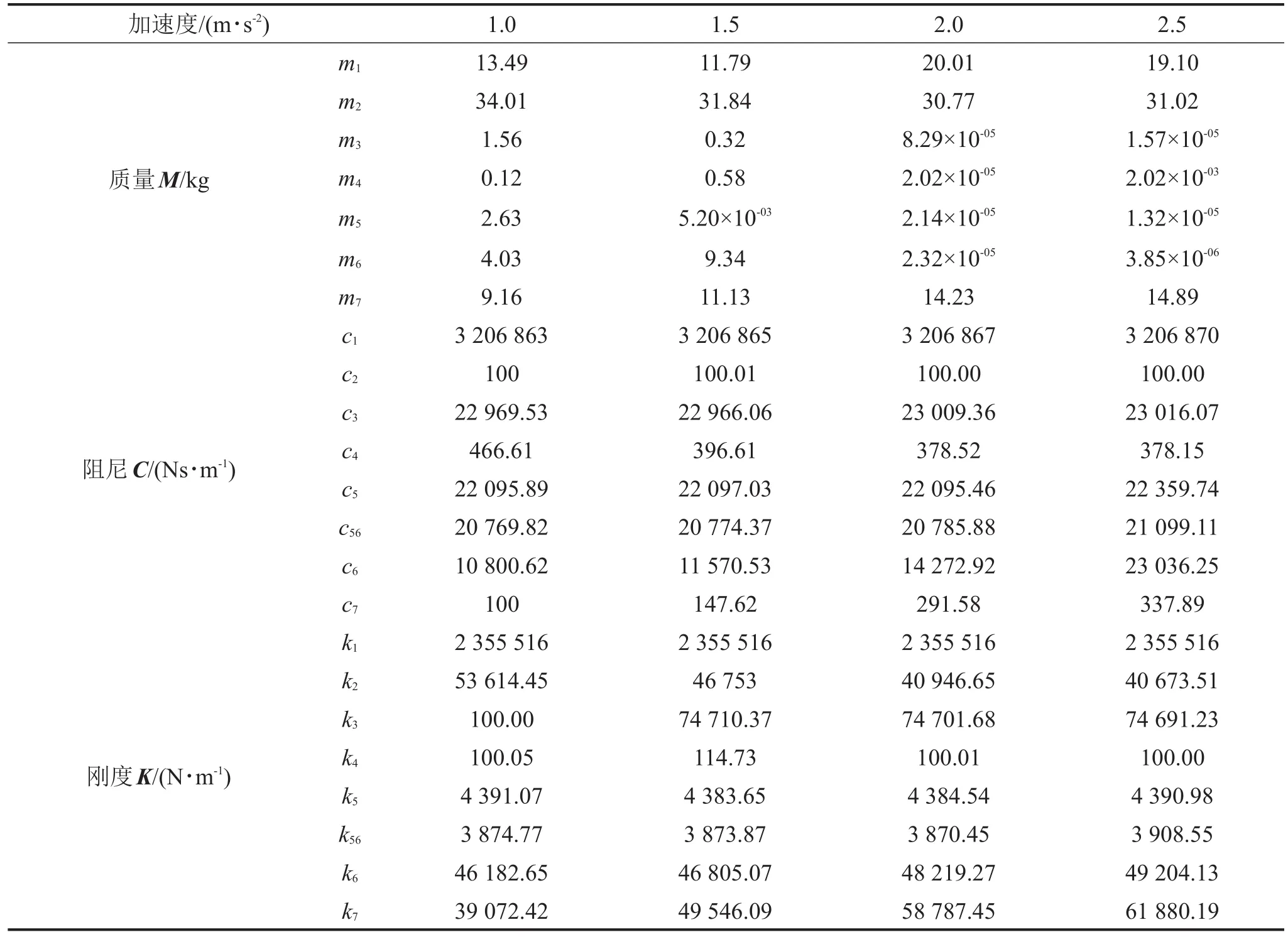
表3 4种不同加速度下的7自由度模型参数识别结果
4.3 模型对比
在图9中对本文中的7自由度模型预测的视在质量曲线、ISO 5982中的3自由度模型预测的视在质量曲线和实验所得的曲线进行对比。7自由度模型的参数采用表3中的数据,3自由度模型的参数采用ISO 5982中的参数。
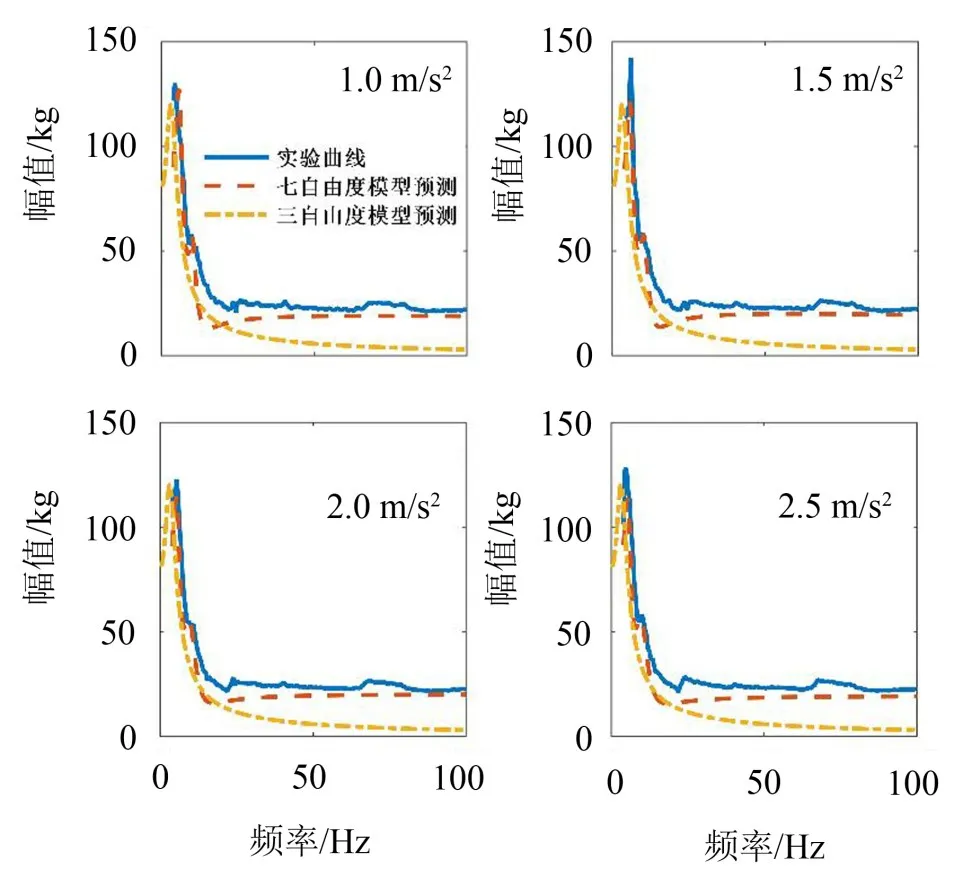
图9 4种不同幅值加速度下的实验曲线与模型(7自由度模型和ISO模型)预测曲线的对比
从图9中可以看出,在4种不同振动加速度下,7自由度模型的预测曲线比ISO 5982的预测曲线更接近实验得到的曲线。7自由度模型的预测曲线在10 Hz~12 Hz之间存在次共振峰,而对于ISO 5982中的3自由度模型无法预测出次共振峰。在20 Hz~100 Hz的较高频率范围内,7自由度模型预测曲线与实验所得曲线基本重合,趋近于常值(图中约为20 kg);而3自由度模型的预测曲线在20 Hz以上随频率升高递减至0,与实验结果不符。
4.4 模型预测的人体各部分振动的传递性
文中的7自由度模型可以计算坐姿人体各个部分的垂直振动的传递特性,反映振动在人体各部分传递时出现的差异性和滞后性,例如图10和图11分别表示人体的头部-座椅和背部-座椅的垂直振动传递特性。
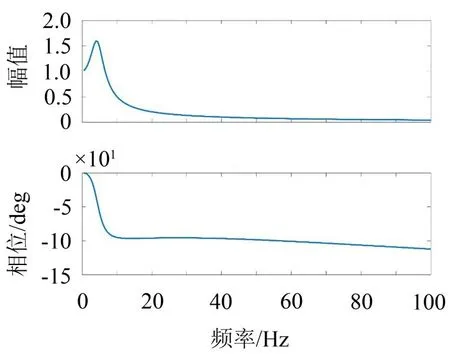
图10 头部-座椅传递性曲线
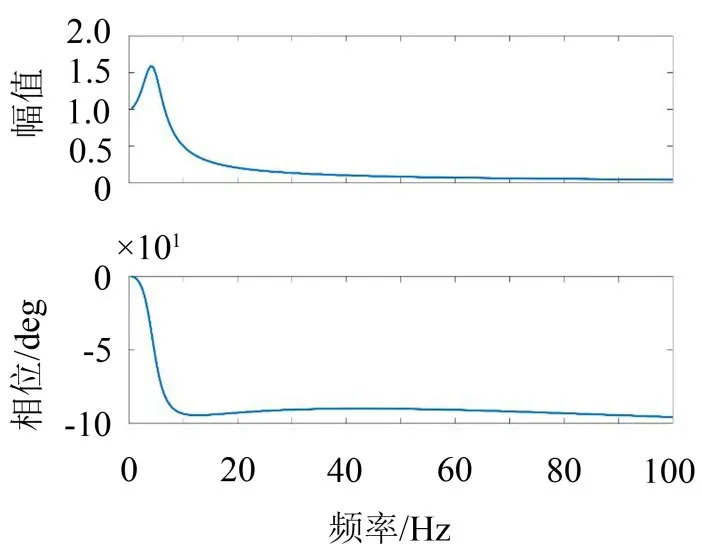
图11 背部-座椅传递性曲线
5 结语
本文提出了垂直振动下的坐姿人体的动力学7自由度修正模型。模型预测的视在质量曲线在2 Hz~100 Hz频率范围内和实验结果吻合得较好。同ISO 5982中的3自由度模型相比,文中的7自由度模型可以更好地预测较高频率(20 Hz~100 Hz)和较大幅度(1.0 m/s2~2.5 m/s2)的垂向振动下的人体的动力学响应。
[1]董霜,朱元清.环境振动对人体的影响[J].噪声与振动控制,2004,24(3):22-25.
[2]GRIFFIN M J.Handbookofhumanvibration[M]. London:Academic Press,1990.
[3]张志飞,徐中明,贺岩松,等.人体全身振动评价研究[J].噪声与振动控制,2010,30(2):149-155.
[4]COERMANN R R.The mechanical impedance of the human body in sitting and standing positions at low frequencies[J].Human Factors,1962,4(10):227-253.
[5]SUGGS C W,ABRAMS C F,STIKELEATHER L F. Application of a damped spring-mass human vibration simulator in vibration testing of vehicle seats[J]. Ergonomics,1969,12(1):79-90.
[6]MUKSIAN R,NASH C D.A model for the response of seated humans to sinusoidal displacements of the seat[J].Journal of Biomechanics,1974,7(3):209-215.
[7]PATIL M K,PALANICHAMY M S,DHANJOO N G. Minimization of the verticale vibrations sustained by a tractor operator,by provision of a standard-type tractor seat suspension[J].Annals of Biomedical Engineering, 1978,6(2):138-153.
[8]AMIROUCHE F M L,IDER S K.Simulation and analysis ofa biodynamic human modelsubjected to low accelerations-a correlation study[J].Journal of Sound and Vibration,1988,123(4):281-292.
[9]LOW T C,PRASAD P.Dynamicresponseand mathematical model of the side impact dummy[R].SAE Technical Paper 902321,1990,doi:10.4271/902321.
[10]ISO 5982.Mechanical vibration and shock-mechanical transmissibility of the human body in the z direction[S]. Geneva:International Organization for Standardization, 2001.
[11]QASSEM W,OTHMAN M O.Vibration effects on sitting pregnant women-subjects of various masses[J].Journal of Biomechanics,1996,29(4):493-501.
[12]BOILEAU P E,RAKHEJA S.Whole-body vertical biodynamic response characteristics of the seated vehicle driver: measurement and model development[J].International Journal of Industrial Ergonomics,1998, 22(6):449-472.
[13]ZHOU Z,GRIFFIN M J.Response of the seated human body to whole-body vertical vibration:biodynamic responses to sinusoidal and random vibration[J].Ergonomics,2014,57(5):1-19.
[14]ABBAS W,ABOUELATTA O B,ELAZAB M,et al. Optimization of Biodynamic Seated Human Models Using Genetic Algorithms[J].Engineering,2015,2(9): 710-719.
[15]FAIRLEY T E,GRIFFIN M J.The apparent mass of the seated human body:vertical vibration[J].Journal of Biomechanics,1989,22(2):81-94.
7-DOF Modelling and Testing of Seating Human Bodies for Prediction of Responses to Large Magnitude Vertical Vibration at High Frequencies
LIANG Shi-hao,HUANG Yu
(Institute of Vibration Shock and Noise,Shanghai Jiaotong University,Shanghai 200240,China)
In order to control the interior vibration of buildings and vehicles,a proper model of human bodies needs to be developed to predict their dynamic responses under different conditions.So far,most of the previous studies are concentrated on the biodynamic responses to the vibration at relatively low frequencies(<20 Hz)and small magnitudes(acceleration<1.5 ms-2),which may not be suitable for prediction of the human body responses to vibration at relatively high frequencies(>20 Hz)and large magnitudes(acceleration>1.5 ms-2).The present study proposes a modified 7 degrees-of-freedom(DOF)model to predict the biodynamic response of the seating human bodies to the vertical vibration at relatively high frequencies and large magnitudes.An experiment is conducted to measure the apparent mass of the seating human bodies on 25 volunteers(13 males and 12 females)with random vertical vibration at 2 Hz-100 Hz and four different acceleration magnitudes(1.0 m/s2,1.5 m/s2, 2.0 m/s2and 2.5 m/s2).The experimental data are compared with the prediction data to identify the parameters of the 7-DOF model.The results show that the modified 7-DOF model can predict the dynamic response of the seating human bodies to the vertical vibration at frequencies higher than 20 Hz and magnitudes larger than 1.0 m/s2more accurately than the 3-DOF model suggested in the international standard.
vibration and wave;human body;vertical vibration;biodynamic;apparent mass
TH113;X593;Q689
:A
:10.3969/j.issn.1006-1355.2017.03.002
1006-1355(2017)03-0007-07+57
2016-12-15
国家自然科学基金资助项目(11402147)
梁世豪(1995-),男,山西省晋中市人,本科生,研究方向为生物力学。
黄煜,男,浙江省台州市人,博士生导师。E-mail:yu_huang@sjtu.edu.cn
