潜孔钻机行走驱动装置仿真分析
2017-06-23吕德仙
吕德仙
(中煤平朔集团有限公司 安家岭露天矿,山西 朔州 036006)
潜孔钻机行走驱动装置仿真分析
吕德仙
(中煤平朔集团有限公司 安家岭露天矿,山西 朔州 036006)
分析了行走驱动装置液压系统的工作原理,对行走驱动装置进行了受力分析以及运动分析。利用AMESim建立起行走驱动装置液压系统的仿真模型,分别对单侧转弯工况、变速换挡行走工况、爬坡工况进行了分析研究。
潜孔钻机;行走驱动装置;AMESim;工况仿真分析
0 引 言
近年来,随着工业的快速发展,矿石的需求量也随之增长,而潜孔钻机等采矿关键技术也得到了迅速发展。潜孔钻机是一种凿岩钻孔装备,冲击器与钻头一起进入钻孔内,回转机构停留在钻孔外驱动钻头回转,从而实现岩石钻孔[1]。现阶段国内很多高校和研究院都对潜孔钻机进行相关研究,研究内容主要涉及防卡钻系统、钻机的平台、除尘系统、回转系统等。
潜孔钻机行走驱动装置主要是用来驱动潜孔钻机的移动,实现潜孔钻机的短距离的行走和穿孔过程中的移位。作业场所的不平整、碎石、高温以及潮湿等,这些恶劣因素决定了潜孔钻机的驱动行走机构必须具备较高的性能。从潜孔钻机整机的各项动作所需要的功率来看,其中行走驱动装置所消耗的功率最大[2]。若潜孔钻机的行走功率设置偏大,显然会出现功率浪费的情况,若行走功率设置偏小则会出现动力不足的现象[2]。由于矿场存在着多种不利因素,且潜孔钻机的行走速度比较缓慢,能量利用率低,因此有必要对行走驱动装置在不同工况下进行分析研究。
1 行走驱动装置液压系统工作原理
现在潜孔钻机行走驱动装置结构通常采用“四轮一带”形式,发动机直接驱动变量泵,高压油通过控制阀之后驱动液压马达正转或反转,液压马达带动履带转动,从而使潜孔钻机前进或后退。潜孔钻机行走液压系统是一个双变量泵一双变量马达独立驱动的液压回路,左右的液压马达相互独立[2]。潜孔钻机通过行走驱动装置可实现前进、后退和速度的控制,也可以实现原地转弯。
潜孔钻机行走驱动装置液压系统工作原理如图1所示。当潜孔钻机原地不动时,换向阀4处于中位,行走驱动装置不工作。当换向阀4处于右位时,高压油通过换向阀4右边阀口进入工作回路中。高压油再经过单向阀6后进入变量马达12中,变量马达处于正转状态。此时换向阀7阀芯左端与高压油接通,而右端与油箱相通,换向阀7阀芯在左右两端压力差的作用下而处于左位,而换向阀9由于阀芯右端受到高压油的作用而处于右位,则高压油经过梭阀8和二位三通换向阀9之后进入变量马达排量控制缸,使变量马达斜盘的倾角增大,变量马达的排量也立即增大,从而使潜孔钻机行走状态进入低速模式;当外接油口K接通高压油时,换向阀9的阀芯左侧受到高压油的作用,换向阀9处于左位,变量马达排量控制缸的左腔与油箱相通,变量马达斜盘的倾角减小,变量马达的排量也立即减小,潜孔钻机行走状态进入高速模式。同理控制换向阀4处于左位,即可以实现变量马达的反转,使潜孔钻机进入后退状态。

图1 潜孔钻机行走驱动装置液压系统原理
2 潜孔钻机行走驱动装置动力学分析
2.1 行走驱动装置的运动分析
潜孔钻机履带式行走机构的核心部件包括悬架构造和行走机构,悬架构造的主要功能是用来连接各种部件,确保钻机的稳定性,行走机构由“四轮一带”组成来支撑机体,传送发动机功率,利用履带与地面的相互作用,从而产生机械行走和作业的牵引力[3]。在潜孔钻机行进当中,若履带与路的接触面之间不存在滑移现象时,履带的移动速度等于与之相接触处的驱动链轮的圆周速度,在这种情况下潜孔钻机的移动速度为:

式中:nm为液压马达的转速,r/min;nl为行走驱动轮转速,rpm;t0为履带板两端销孔之间的直线距离,m;Zk为履带板上的块数;rd为驱动轮半径,m;im为液压驱动装置的传动比。
但在实际情况中,由于存在着各种不利因素,履带与地面之间必定存在着一定程度的滑移,则潜孔钻机实际行走速度与理论速度之间的关系可表述为:

式中:δ为履带相对地面的滑转率。把(1)式带入(2)式可得:

2.2 行走装置的受力分析
履带式车辆是靠履带板卷绕时地面对履带接触面产生的反作用力来推动车辆移动的。而对于潜孔钻机来说,拉力是属于内部作用力,它的作用效果是把履带的接触面从支重轮下拉出,从而使地面对履带的接地段产生水平方向的反作用力,正是这种反作用力的形成为潜孔钻机提供了驱动力,力的方向与钻机行进的方向同向。在动力由驱动轮传递到履带的接地段的这个过程中必定存在能量损失[4]。如果这个过程中能量传递损失用履带驱动段效率来表示,则潜孔钻机驱动力的切线牵引力便可表示为:

式中:Ft为履带产生的拉力,N;ηr为履带驱动段效率;Mk为行走马达输出的力矩,Nm;rd为钻机驱动轮半径,m。
在等速前进的工况下潜孔钻机的牵引力为:

潜孔钻机在行走过程中,受到的外部阻力主要有滚动阻力、坡道阻力和工作阻力。
滚动阻力:

式中:α为运动表面对水平的倾角,°;G为潜孔钻机的重量,N;f为路面的摩擦因素。
坡道阻力Fi:

式中:正号表示潜孔钻机上坡时的工况,负号表示潜孔钻机下坡时的工况。
潜孔钻机受到工作阻力Fx表示的是工作装置受到的阻力,而在非牵引车辆受到的工作阻力一般为0。
则作用在潜孔钻机上的外部阻力总和即为:

则潜孔钻机的牵引力为:

潜孔钻机等速前进时,有效牵引力Fkp的表达式为:

当潜孔钻机在水平地面上匀速移动时:

潜孔钻机在不稳定工况下行走时,惯性力会对钻机的行走造成影响,此时牵引力为

式中:Fj乃为潜孔钻机受到的惯性阻力,可通过公式计算:

式中:正号表示潜孔钻机加速时受到的惯性力;负号表示潜孔钻机减速时受到的惯性力;ηm为马达的总效率;Je为转动惯量,kg·m2;v为潜孔钻机移动速度,m/s。
此时潜孔钻机的有效牵引力Fkp为:

为了能使潜孔钻机能够正常行走,所受到的阻力与地面附着力应满足下式:

其中:G为潜孔钻机附着重量;φ为附着系数。
3 仿真模型的搭建
LMS Imagine.Lab AMESim为多学科领域复杂系统建模仿真平台[5]。用户可以在这个单一平台上建立复杂的多学科领域的系统模型,并在此基础上进行仿真计算和深入分析,也可以在这个平台上研究任何元件或系统的稳态和动态性能[6]。
利用AMESim中元件库中的元件塔建驱动行走装置液压系统的仿真模型,如图2所示。图中各种元件的意义可以通过AMESim软件手册查阅来获得[7]。
4 在不同工况下的仿真结果与分析
4.1 单侧转弯工况下仿真结果分析
假设潜孔钻机在理想的混凝土水平地面上行走,且此时液压马达处于最大排量,即潜孔钻机处于缓慢行走状态。在参数设定时设定在行走装置单侧驱动轮上的力矩为 13 160 Nm,仿真时间设置为 4,前一秒为潜孔钻机行走驱动装置启动阶段,1~4为潜孔钻机单侧转弯仿真时间,得到单侧转弯工况下马达进口压力变化曲线,如图3所示。
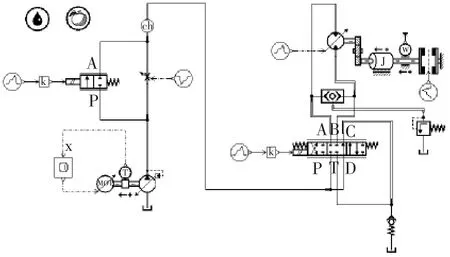
图2 行走液压系统的AMESim模型
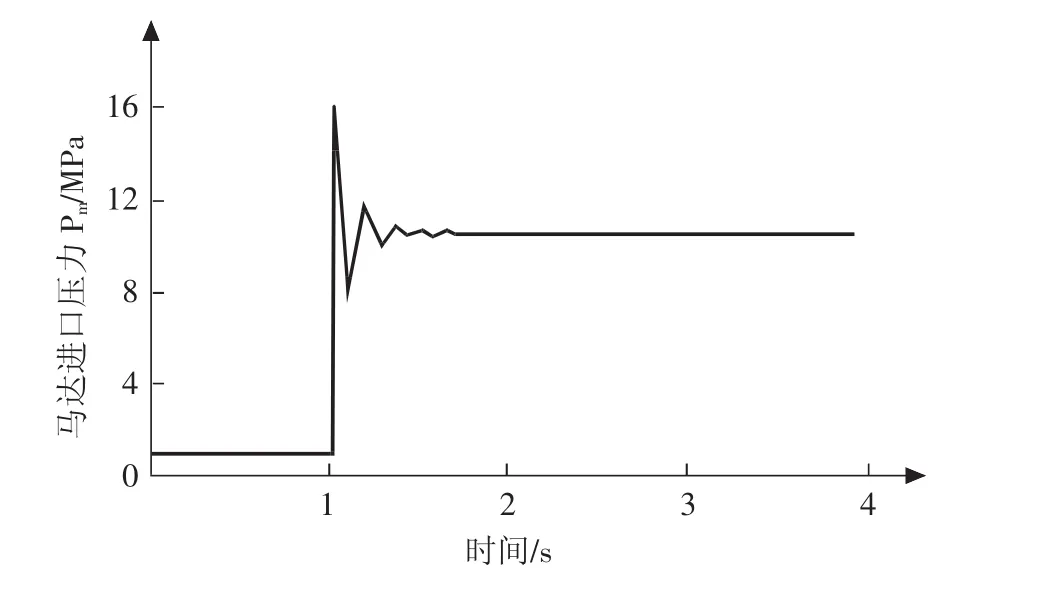
图3 单侧转弯工况下的仿真曲线
由图3可知,当添加了载荷之后,液压马达进口压力值急剧上升,峰值达到了16 MPa左右,经过短暂的震荡之后液压马达进口压力稳定在10.5 MPa左右。由此可以得出单侧转弯工况下行走系统的稳定好,有很好的响应速度,但却存在超调量过大的问题。
4.2 换挡变速行走工况下仿真分析
假设潜孔钻机是在平面上行走,前面是液压系统的驱动阶段。启动完毕之后潜孔钻机开始慢速行走,在潜孔钻机行走3 s之后令液压马达的排量减半,潜孔钻机进入快速行走的状态,此时在行走驱动轮上施加的动力矩为5 800 Nm。整个仿真过程持续7 s,得到变量马达进口压力变化曲线,如图4所示。
由仿真结果图可以得出变量马达的进口压力在仿真开始后瞬间出现峰值,最大值达到了14 MPa左右,但经过短时间的波动之后进入稳定状态,变量马达的进口压力稳定在5.2 MPa;在液压马达的排量发生变化的情况下,液压马达入口位置的压力先急速变小,然后急剧变大,最后缓慢进入稳定状态。压力快速降低是由于在变量马达排量减少瞬间,潜孔钻机行走速度立即增大,行走驱动装置所需要的流量瞬间变大,所以压力值会突然变小,然后再上升,最后达到稳定状态。该工况下液压系统的稳定性良好,但响应速度显然较慢,液压系统会出现冲击现象。
4.3 爬坡工况分析
在潜孔钻机启动3 s之后开始模拟上爬坡度为15°的斜面,爬坡过程持续17 s。在这种工况下,相当于 3 s后把一个斜坡阻力施加到潜孔钻机上,阻力的范围是0~70 636 N。这种工况下总的仿真时间设定为25,得到如图 5所示的液压马达进口压力变化曲线。
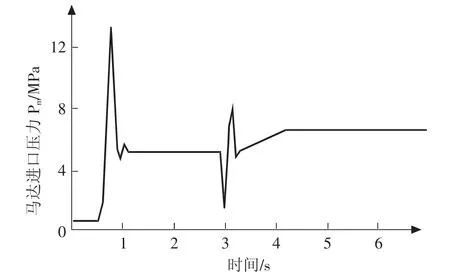
图4 换挡变速行走工况下仿真结果
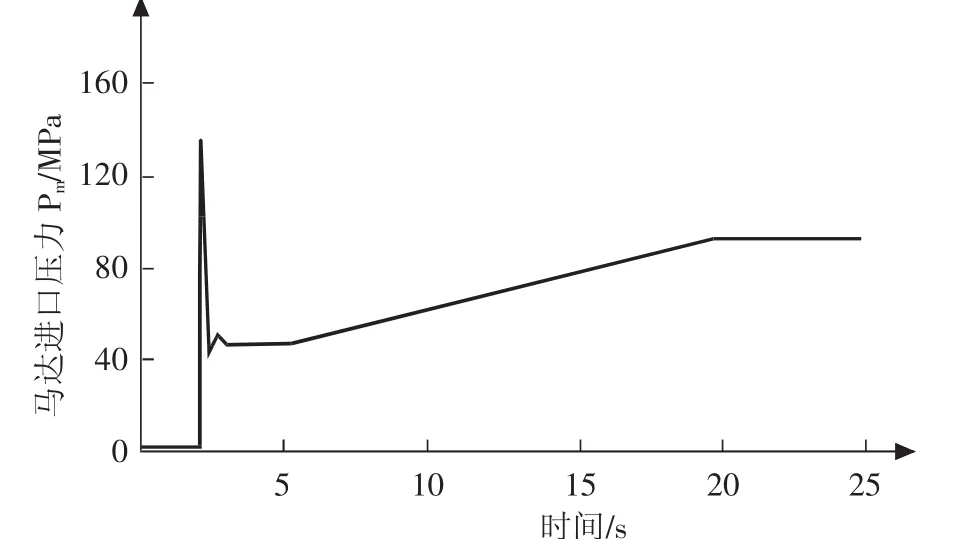
图5 爬坡工况下仿真分析结果
由仿真结果图可以看出,当给潜孔钻机施加一个斜坡阻力后,液压马达进口处的压力先急剧上升,然后缓慢上升,最后进入一个稳定状态。这种工况下行走系统进入稳定的时间比较长,且在刚开始的阶段会存在冲击,影响系统的稳定性。
5 结 论
先介绍了潜孔钻机行走驱动装置的液压系统工作原理,然后对行走驱动装置进行了运动与受力分析。利用AMESim建立了潜孔钻机行走驱动装置的仿真模型,分别对单侧转弯工况、换挡变速行走工况以及爬坡工况这3种状态进行仿真分析。仿真结果表明系统在负载变化和换挡变速时,都存在压力冲击现象,其过渡阶段的特性有待于改进。仿真分析结果为日后潜孔钻机的行走驱动装置的改善与设计提供了参考。
[1] 赵宏强,郭艳,吴双斌.基于模糊控制的潜孔钻机推进回转系统仿真[J].计算机防真,2011(8):159-162.
[2] 谢武装.潜孔钻机行走驱动系统参数匹配研究[D].长沙:中南大学,2009.
[3] 赵宏强,谢武装,蒋海华.潜孔钻机履带行驶液压驱动系统效率研究[J].现代制造工程,2009(10):97-100.
[4] 徐晓龙.履带式湿地推土机行走系统仿真研究[D].长春:吉林大学,2014.
[5] 李景阳,安林超.浅谈计算机辅助技术在液压系统设计中的应用[J].企业导报,2014(11):144.
[6] 赖茶秀,黄志坚.液压系统计算机辅助设计技术现状与发展趋势[J].南方金属,2007(6):8-11.
[7] Imagine company.AMESim user manual Version 7.0[M].France:Imagine S.A,2002.
【责任编辑:解连江】
Simulation analysis of driving device of submersible drilling rig
LV Dexian
(Anjialing Open-pit Mine,China Coal Pingshuo Group Co.,Ltd.,Shuozhou 036006,China)
The article analyzes the working principle of walking driving device hydraulic system,and carries out the dynamic analysis of walking driving device.Using AMESim to establish the simulation model of the walking driving device hydraulic system ,the author researches the single side turning condition,the variable speed shift working condition and the climbing condition.
submersible drilling rig;walking driving device;AMESim;condition simulation analysis
TD422.1
B
1671-9816(2017)06-0066-04
10.13235/j.cnki.ltcm.2017.06.019
吕德仙.潜孔钻机行走驱动装置仿真分析[J].露天采矿技术,2017,32(6):66-69.
2016-12-03
吕德仙(1988—)男,内蒙古乌兰察布人,助理工程师,2011年毕业于呼伦贝尔学院采矿工程专业,现在安家岭露天矿穿爆班工作。
