遗传算法优化的双挂汽车列车主动力矩控制*
2017-06-19张义花许洪国刘宏飞
张义花 许洪国 刘宏飞
(吉林大学 交通学院, 吉林 长春 130022)
遗传算法优化的双挂汽车列车主动力矩控制*
张义花 许洪国 刘宏飞†
(吉林大学 交通学院, 吉林 长春 130022)
为提高双挂汽车列车横向稳定性及行驶安全性,通过建立包括主动力矩控制的双挂汽车列车模型,将列车后部放大系数(RWA)与质心侧偏角之和的最小值作为适应度函数,基于遗传算法优化设计了线性二次型控制器(LQR),以获得最优的主动力矩并反馈给车辆模型;与不加控制器的车辆模型相比,增加主动力矩控制可避免拖台和二挂车的蛇形运动,同时使得RWA值下降7.9%,且各个车辆单元将更快达到稳定状态.但该控制策略对各个车辆单元质心侧偏角的控制不如对横摆角速度的控制精确.
车辆动力学;双挂汽车列车;主动力矩控制;遗传算法;线性二次型控制器
双挂汽车列车由于其质心高、车身长、载重量大等结构特点,易出现折叠、甩尾、侧翻及蛇形等危险行驶状态[1].针对以上危险工况,相关人员进行了大量研究.
文献[2]中在结构参数和使用参数对多挂汽车列车行驶稳定性影响方面,通过对无铰接点、具有1个和2个铰接点的多种类型的欧洲汽车列车动力学进行研究,得到不同后部放大系数(RWA)值对其横向稳定性的影响不同.不同侧偏刚度的轮胎对汽车列车的折叠及甩尾具有重要影响[3],同时,轴数的变化对多轴汽车列车横向稳定性的影响显著[4].不同的悬架结构(即钢板弹簧和空气弹簧)对汽车列车的侧翻稳定性也具有直接影响[5].Gagnon等[6]利用331个自由度的汽车列车模型,获得了道路、燃油消耗、车辆磨损与乘员安全性之间的关系.另外,文献[7]中,通过分析RWA值与车速、拖台尺寸及挂车质心位置之间的关系,协调得到的最优值达到了提高汽车列车行驶稳定性的目的.
在多挂汽车列车的行驶稳定性控制方面,主要有基于挂车主动转向和主动制动的控制策略.He等[8]利用综合设计方法,即高速时提高横向稳定性和低速时实现路径跟踪,进行挂车的主动转向控制,以达到减小RWA值的目的.Islam等[9]利用预瞄控制器进行挂车的主动转向控制,即根据前一车辆单元的位移偏差对后一车辆单元进行调整,也达到了减小RWA值及提高横向稳定性的目的.Kharrazi等[10]通过建立线性与非线性汽车列车模型,分析了9种车型的主动转向前馈和反馈控制.Roebuck等[11]通过控制拖台和挂车的主动转向角度,达到了减小汽车列车横向跟踪偏差及RWA值的效果.利用线性二次型控制器(LQR)对铰接式汽车列车的线性模型进行控制,并跟踪期望的状态变量,可提高其方向稳定性[12].Sun等[13]通过建立汽车列车线性模型对挂车进行主动差动制动控制,得到低侧向加速度时可提高横向稳定性、但不适用于高侧向加速度的汽车列车稳定性控制方案.另外,通过控制拖台的转向、制动和驱动,可使得双挂汽车列车与半挂汽车列车具有相似的行驶性能[14].
总之,在多挂汽车列车的稳定性控制中,多以减少RWA值为控制目标,缺乏将RWA值与质心侧偏角相结合作为控制目标的综合控制策略.文中通过建立包括主动力矩控制的双挂汽车列车模型,以质心侧偏角和RWA值之和最小作为适应度函数,利用遗传算法优化设计LQR控制器,得到最优的主动力矩并反馈给车辆模型,将其与无控制器的车辆模型进行对比分析,以达到提高双挂汽车列车横向稳定性的目的.
1 车辆模型及评价指标
1.1 双挂汽车列车模型
双挂汽车列车由4个车辆单元组成,如图1所示.为研究车辆的横向稳定性并通过控制主动力矩提高其行驶安全性,考虑双挂汽车列车的侧向、横摆运动以及各个车辆单元之间的铰接角,建立整车动力学模型,如图2所示.设定车辆在附着系数良好的路面上行驶.
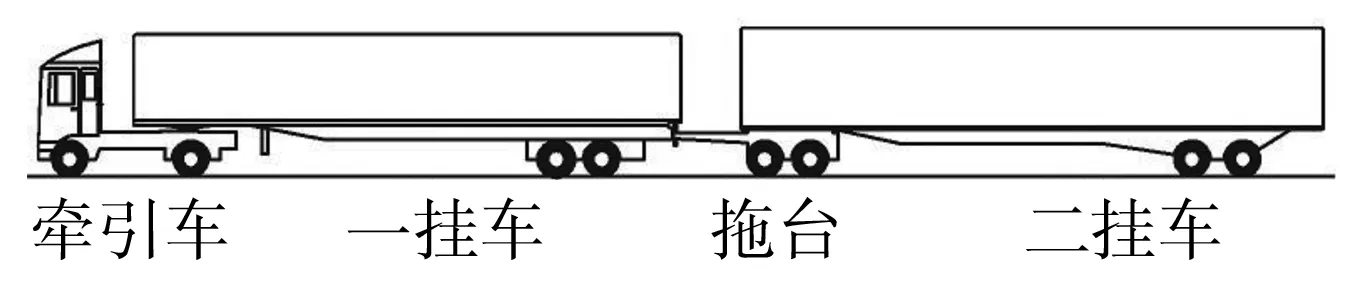
图1 双挂汽车列车
牵引车动力学方程为
(1)
一挂车动力学方程为
(2)
拖台动力学方程为
(3)
二挂车动力学方程为
(4)
式中:mi(i=1,2,3,4)为各个车辆单元的质量;ui、βi、ωi(i=1,2,3,4)分别为各个车辆单元质心的纵向速度、质心侧偏角、横摆角速度;Ii(i=1,2,3,4)为各个车辆单元质心的横摆转动惯量;Fyf、Fyr考虑车辆模型高速小角度转向,有u1=u2=u3=u4,Fx1=Fx2,Fy1=Fy2,Fx3=Fx4,Fy3=Fy4,Fx5=Fx6,Fy5=Fy6.

图2 车辆动力学模型
(i=1,2,3,4)分别为各个车辆单元车轮的侧偏力;Fyj(i=1,2,…,6)为各个车辆单元之间铰接点处沿侧向速度方向的作用力;sl(l=1,2,…,11)为各个车辆单元的结构尺寸,如图2所示.另外,Mi(i=1,2,3)为附加到后3个车辆单元上的主动力矩.
在汽车列车模型中,各个车辆单元之间的横摆角速度与铰接角度的关系为



式中,ψ1、ψ2、ψ3分别为牵引车与一挂车、一挂车与拖台、拖台与二挂车之间的夹角.
同时,由于车辆的质心侧偏角为
其中,v为侧向速度,则各个车辆单元质心侧偏角之间的关系为
(5)
(6)
(7)
线性轮胎模型的轮胎侧偏力及侧偏角分别如下.
Fyf=k1α1
(8)
Fyri=ki+1αi+1
(9)
式中,i=1,2,3,4,且
α1=β1+ω1s1/u1-δf,
α2=β1-ω1s2/u1,
α3=β2-ω2s5/u2,
α4=β3-ω3s8/u3,
α5=β4-ω4s11/u4.
将式(1)-(9)及各个附加条件代入,得到
(10)
(11)式中,X=[β1β2β3β4ω1ω2ω3ω4]T,A=M-1N,B0=M-1Q0,B1=M-1Q1,U0=[M1M2M3]T.
双挂汽车列车的技术参数见表1.
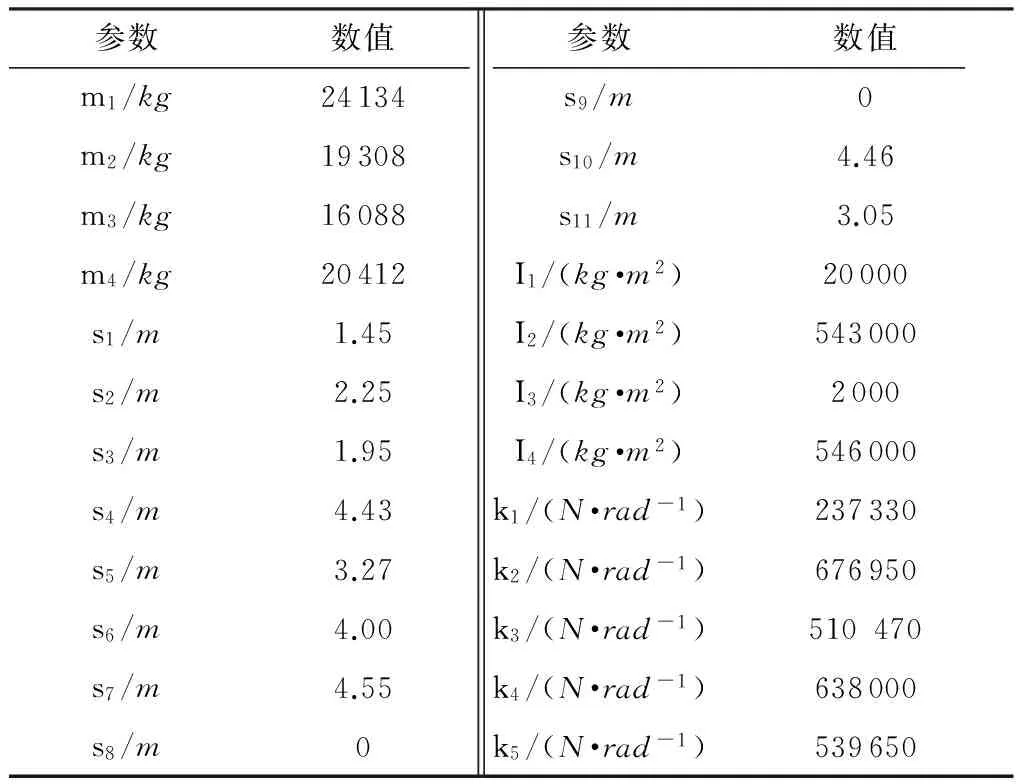
表1 双挂汽车列车技术规格参数
1.2 评价指标
多挂汽车列车操纵稳定性研究中,常用RWA评价其横向稳定性,其定义为[15]
RWA=ω4max/ω1max
(12)
式中,ω1max和ω4max分别为牵引车和二挂车对应的最大横摆角速度.
2 遗传算法优化LQR控制
2.1 遗传算法
遗传算法是将初始种群经过适应度函数计算后,并经过选择、交叉和变异,最终得到最优个体的过程,该方法在LQR控制器设计的多目标寻优中优势明显.文中以RWA值在1附近变化[10]、同时保证双挂汽车列车质心侧偏角最小为控制目标,选择的目标适应度函数为 minf=|e1|+|e2|+|β1|+|β2|+|β3|+|β4|
(13)
式中,
(14)
(15)
2.2 LQR控制器设计
根据双挂汽车列车模型及状态变量的个数,结合控制要达到的目标,得到最优控制的性能指标为
(16)
根据黎卡提方程可求解得到的最优控制率为
(17)
在式(16)和(17)中,Q>0,R>0,P为正定的矩阵,三者均可由遗传算法求解得到最优值.根据适应度函数最小的原则,求解最优的主动力矩.具体求解过程如图3所示.
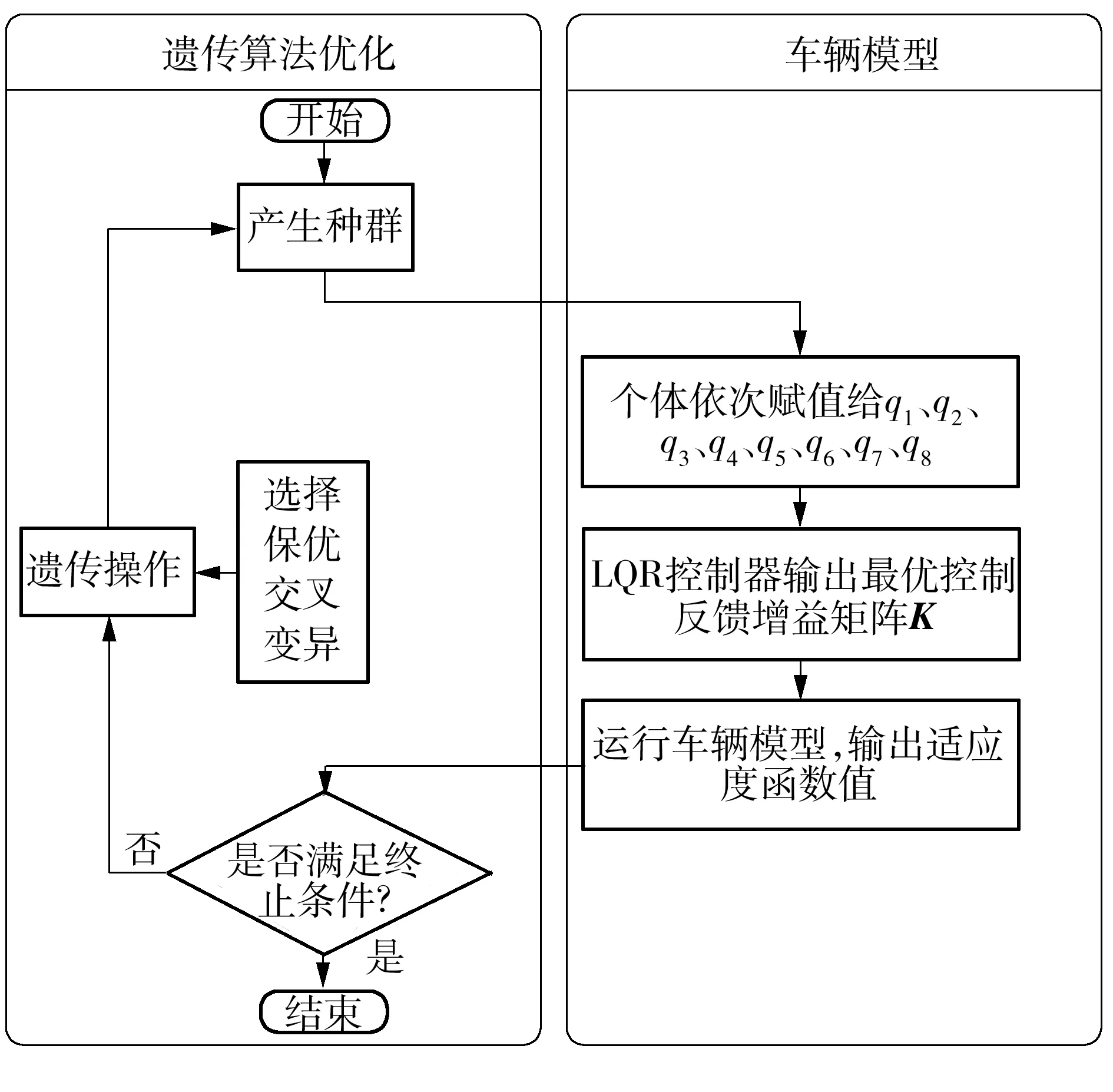
图3 遗传算法优化LQR控制器
3 结果对比与分析
根据所建车辆模型及遗传算法优化得到的LQR控制器,分别设定双挂汽车列车的车速为20 m/s,前轮转角为0.1 rad(5.7°)进行阶跃响应分析,并对无控制器和有控制器的车辆模型进行对比.利用遗传算法优化LQR控制器时,设定遗传算法的各个参数见表2,从而得到8个最优个体及对应的适应度函数值,如图4所示.

表2 遗传算法参数设置

图4 最优个体及对应的适应度函数值
Fig.4 Best individuals and the corresponding fitness function value
由图4可知,随着遗传代数的增加,适应度函数值逐渐减小,说明遗传算法适用于该车辆模型中最优主动力矩的求解.因此,得到最优适应度函数值为0.174 748,同时对应的最优个体分别为q1=9.713 6×1011;q2=4.514 8×1011;q3=1.701 1×1011;q4=4.665 1×1011;q5=8.900 8×1011;q6=0.081 6×1011;q7=0.950 8×1011;q8=1.728 3×1011.
根据上述遗传算法的求解,可得到图5中后3个车辆单元的主动力矩.为评价其与附着极限的关系,假定良好路面的附着系数为0.7,因一般重型车辆轮距为1.8 m,那么对应一挂车、拖台和二挂车最大附着力矩分别为6.1×104、5.1×104、6.4×104N·m,而图5中对应3个车辆单元的主动力矩分别为3.6×104、5.1×104、2.9×104N·m,所以主动力矩不会达到轮胎与地面之间的附着极限,可以实现双挂汽车列车的横向稳定性控制.
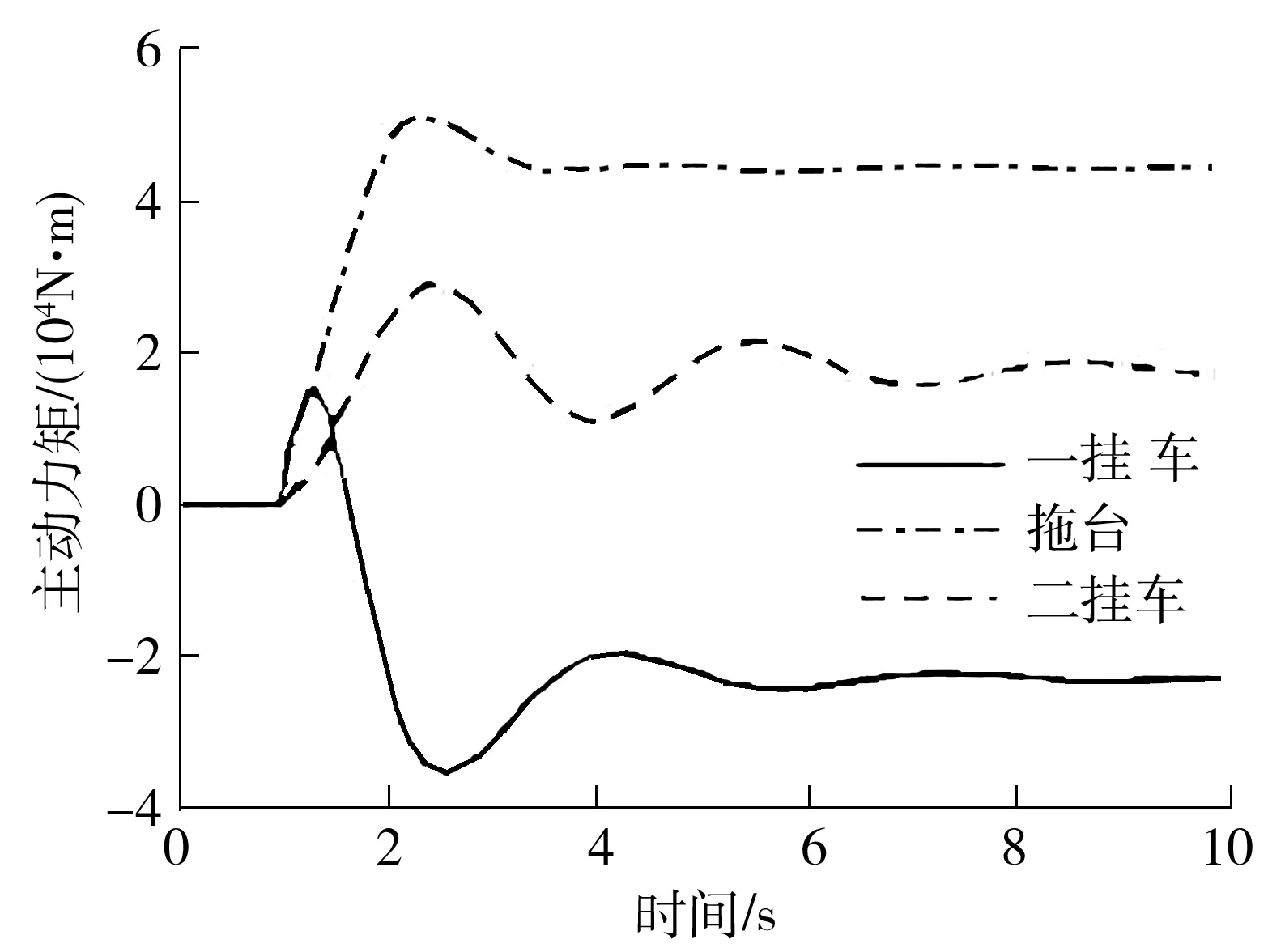
图5 控制后的最优主动力矩值
3.1 控制前后仿真对比
根据双挂汽车列车模型及遗传算法得到的最优LQR控制器,进行控制前后的对比仿真,结果分别如图6和7所示.由控制前各个车辆单元的状态变量变化可知,拖台和二挂车所对应的质心侧偏角和横摆角速度变化较为剧烈,表现为蛇形运动明显,是引发车辆失稳的主要因素.
由图6可知,控制后各个车辆均很快达到稳定状态,避免了拖台和二挂车的蛇形运动;根据遗传算法的控制目标可知,各个车辆单元的质心侧偏角在0 rad附近时,控制效果最好,而图6(a)、6(b)和6(d)对应的牵引车、一挂车和二挂车虽不能达到0但非常接近;图6(c)对应的拖台与控制前相比更快达到稳定状态,但其稳定值较大,这是由于拖台与一挂车的链接形式更易受到影响,同时还与拖台和二挂车铰接时二挂车载荷分配对拖台的影响有关.




图6 双挂汽车列车控制前后的质心侧偏角变化
Fig.6 Change of sideslip angle before and after control in tractor-trailer combination
由图7可知,控制后4个车辆单元对应的横摆角速度响应更快,均收敛到0.1 rad/s附近,这与控制目标中RWA值在1附近变化相吻合.图6(a)中牵引车控制后,在阶跃响应中的超调量几乎为0,图6(c)和6(d)对应的拖台和二挂车经控制后,达到稳定的时间缩短,同时避免了蛇形运动.对比图6和7的变化趋势及以上分析可知,主动力矩对各个车辆单元质心侧偏角的控制作用相对较弱,而对各个车辆单元横摆角速度的控制精度较高且效果更好.
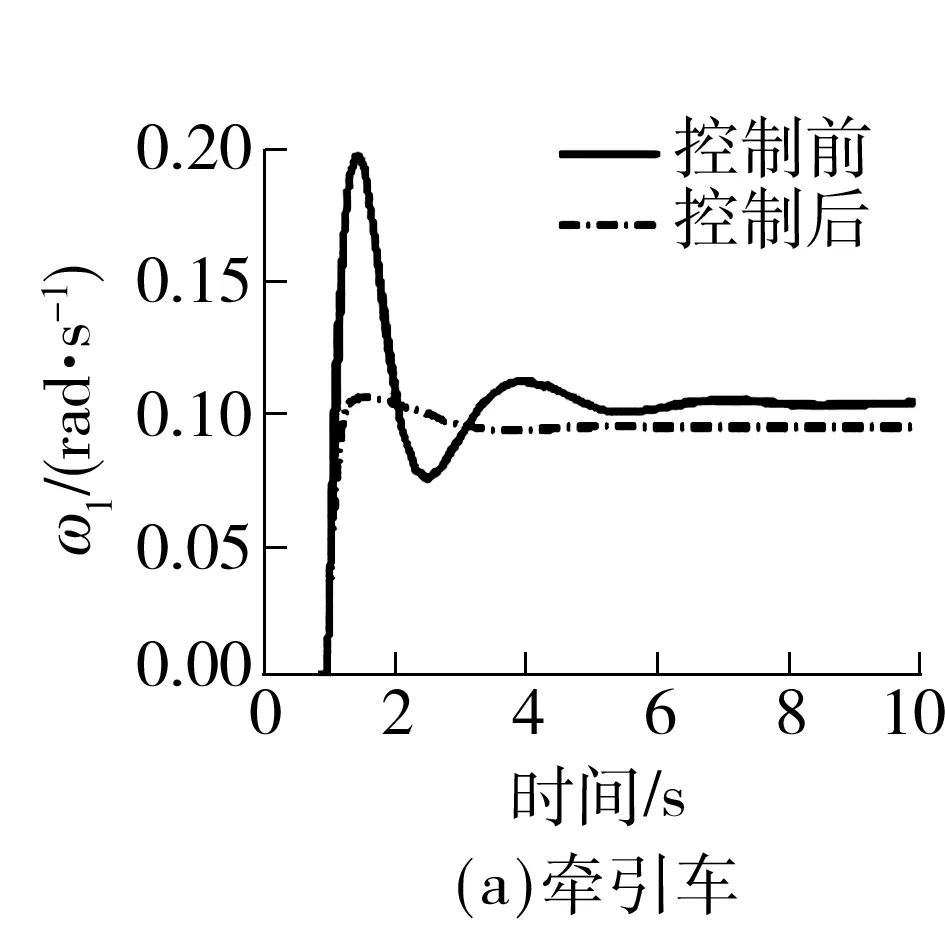
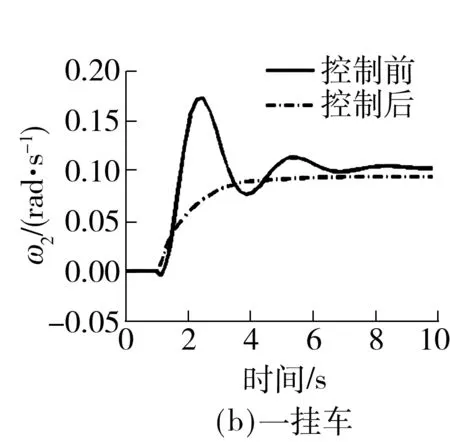


图7 双挂汽车列车控制前后的横摆角速度变化
Fig.7 Change of yaw rate before and after control in tractor-trailer combination
3.2 控制前后RWA值对比
为评价主动力矩的控制效果,将控制前后的评价指标RWA值进行对比分析,见表3.
由表3可知,控制后RWA1为1.05,对应的二挂车与牵引车的比值下降7.9%,说明两个车辆单元在阶跃响应中,其横摆角速度变化平稳,即图7(a)和7(d)很快达到0.1 rad/s的稳态;评价指标RWA2经过控制后其下降率为-41.4%,说明拖台和一挂车对应横摆角速度比值上升了41.4%,这是因为拖台在控制初期超调量较大,如图6(c)所示,但很快恢复到稳定状态,而对应一挂车没有超调,直接稳定在0.1 rad/s附近.综合仿真中各个状态变量的变化趋势及分析可知,主动力矩控制可使汽车列车的响应提前,且达到稳态的时间缩短,同时避免了后部挂车的蛇形运动,达到了提高横向稳定性的目的.
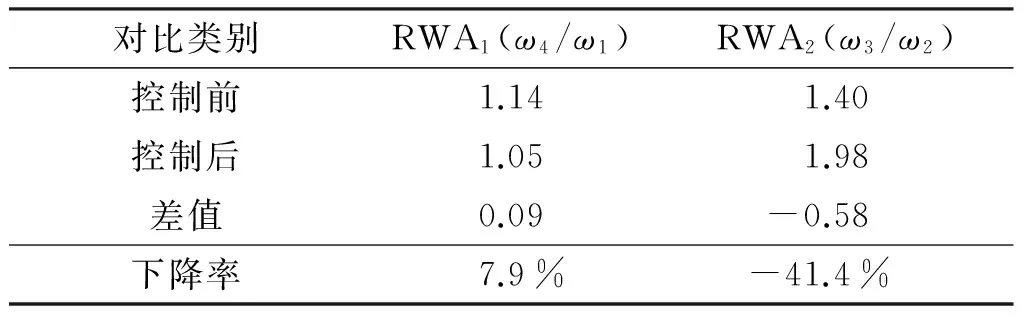
表3 RWA值控制前后对比
在以后的研究中,该控制方法将在实验室组建的相似双挂汽车列车模型车进行验证,为实际双挂汽车列车的控制提供参考.
4 结语
文中通过建立包括主动力矩的双挂汽车列车模型,以RWA为1和各个车辆单元质心侧偏角之和最小为适应度函数,利用遗传算法优化LQR控制器,得到最优的主动力矩值并反馈到车辆模型中,得到如下结论:1)在阶跃响应中,拖台和二挂车的蛇形运动是引起双挂汽车列车失稳的主要影响因素;2)根据控制目标适应度函数以及控制前后变化趋势可知,相比于对质心侧偏角的控制,主动力矩对横摆角速度的控制效果更精确;3)对比控制前后的RWA值及仿真中状态变量的变化趋势可知,经遗传算法优化得到的LQR控制器可使得RWA下降7.9%,同时避免了拖台和二挂车的蛇形运动.
[1] VIK F.Lateral dynamics of commercial vehicle combinations a literature survey [J].Vehicle System Dynamics,1982,11(5/6):305-324.
[2] VAN De Molengraft-Luijten M F J,BESSELINK I J M,VERSCHUREN R,et al.Analysis of the lateral dynamic behaviour of articulated commercial vehicles [J].Vehicle System Dynamics,2012,50(Sup1):169-189.
[3] TABATABAEI S H,ZAHEDI A,KHODAYARI A.The effects of the cornering stiffness variation on articulated heavy vehicle stability [C]∥Proceedings of 2012 IEEE International Conference on Vehicular Electronics and Safety(ICVES).[S.l.]:IEEE,2012:78-83.
[4] AOKI A,MARUMO Y,KAGEYAMA I.Effects of multiple axles on the lateral dynamics of multi-articulated vehicles [J].Vehicle System Dynamics,2013,51(3):338-359.
[5] BARBIERI F A A,de ALMEIDA Lima V,GARBIN L,et al.Rollover study of a heavy truck combination with two different semi-trailer suspension configurations[R]∥SAE Technical Paper.Jilin:Jilin University,2014.
[6] GAGNON L,RICHARD M J,DORE G.A multibody dynamics model to assess the impact of road unevenness on the efficiency of a semitrailer truck [J].International Journal of Vehicle Systems Modelling and Testing,2015,10(1):1-28.
[7] XU H,ZHANG Y,LIU H,et al.Effects of configuration parameters on lateral dynamics of tractor-two trailer combinations [J].Advances in Mechanical Engineering,2015,7(12):198-201.
[8] HE Y,ISLAM M M,WEBSTER T D.An integrated design method for articulated heavy vehicles with active trailer steering systems [J].SAE International Journal of Passenger Cars-Mechanical Systems,2010,3(2010-01-0092):158-174.
[9] ISLAM M M,HE Y.An optimal preview controller for active trailer steering systems of articulated heavy vehicles[R]∥SAE Technical Paper.Jilin:Jilin University,2011.
[10] KHARRAZI S,LIDBERG M,FREDRIKSSON J.A generic controller for improving lateral performance of heavy vehicle combinations [J].Proceedings of the Institution of Mechanical Engineers(Part D)Journal of Automobile Engineering,2012,227(5):619-642.
[11] ROEBUCK R,ODHAMS A,TAGESSON K,et al.Implementation of trailer steering control on a multi-unit vehicle at high speeds [J].Journal of Dynamic Systems Measurement & Control,2013,136(2):167-175.
[12] OREH S H T,KAZEMI R,AZADI S.Directional control of articulated heavy vehicles [J].SAE International Journal of Commercial Vehicles,2013,6(2013-01-0711):143-149.
[13] SUN T,HE Y,REN J.Dynamics analysis of car-trailer systems with active trailer differential braking strategies [J].SAE International Journal of Passenger Cars Mechanical Systems,2014,7(1):73-85.
[14] KATI M S,FREDRIKSSON J,LAINE L,et al.Performance improvement for A-double combination by introducing a smart dolly [C]∥Proceedings of 13th International Heavy Vehicle Transport Technology Symposium.San Luis:Argentina.2014.
[15] KATI M S.Definitions of performance based characteristics for long heavy vehicle combinations [R].Chalmers:Chalmers University of Technology,2013:7-8.
Active Torque Control of Tractor-Trailer Combination Based on Genetic Algorithm Optimization
ZHANGYi-huaXUHong-guoLIUHong-fei
(School of Transportation, Jilin University, Changchun 130022, Jilin, China)
In order to improve the lateral stability and driving safety of tractor-trailer combination, a tractor-trailer combination model considering active torque control was built, and the minimum of the sum of rear amplification factor (RWA) and sideslip angle was used as a fitness function for the genetic algorithm to design an linear quadratic (LQR) controller, by which the optimal active torque was obtained and then feed back to the vehicle model. As compared with the vehicle model without LQR controllers, the proposed model with active torque control can avoid the snaking of the dolly and the second semitrailer, reduce the RWA by 7.9%, and help each unit of the vehicle combination to quickly reach a steady state. However, the proposed strategy for sideslip angle control in each vehicle unit is not as precise as for yaw rate control.
vehicle dynamics; tractor-trailer combination; active torque control; genetic algorithm; linear quadratic controller
2016-06-30
国家自然科学基金面上项目(51475199) Foundation item: Supported by the National Natural Science Foundation of China(51475199)
张义花(1987-),女,博士生,主要从事多挂汽车列车操纵稳定性研究.E-mail:zhangyihua1989@126.com
† 通信作者: 刘宏飞(1971-),男,博士,副教授,主要从事半挂汽车列车横向稳定性研究.E-mail:hongfeiliu@jlu.edu.cn
1000-565X(2017)04-0112-06
U 469.5
10.3969/j.issn.1000-565X.2017.04.016