随机多阶段任务成功概率仿真评估研究
2017-06-08曹文斌贾希胜胡起伟陈冰
曹文斌, 贾希胜, 胡起伟, 陈冰
(1.军械工程学院 装备指挥与管理系, 河北 石家庄 050003; 2.65185部队, 辽宁 沈阳 110000)
随机多阶段任务成功概率仿真评估研究
曹文斌1, 贾希胜1, 胡起伟1, 陈冰2
(1.军械工程学院 装备指挥与管理系, 河北 石家庄 050003; 2.65185部队, 辽宁 沈阳 110000)
多阶段任务系统在工业和军事领域有着广泛应用,准确评估其任务成功概率,对于了解系统性能状态和指导任务规划具有十分重要的现实意义。针对武器装备任务具有较强随机性这一特点,研究随机条件下多阶段任务成功概率仿真评估方法,建立存在随机共因失效时,不可中断和可中断随机多阶段任务成功概率仿真评估流程,并采用Matlab实现了该仿真过程。结合算例,验证了仿真流程的正确性和有效性,并分析了任务参数对任务成功概率的影响。分析结果表明:该仿真评估方法可用于可中断和不可中断随机多阶段任务成功概率评估,能有效解决复杂任务的任务成功概率评估问题;对装备任务进行合理规划,能提高其任务成功概率。
兵器科学与技术; 仿真法; 随机多阶段任务; 共因失效; 任务成功概率
0 引言
随着科学技术的发展,系统的任务过程不再是传统的单阶段任务,而是由在时间上具有连续性和不重叠性、功能上具有相关性的多个任务阶段组成[1-2],且在不同的任务阶段,系统结构、任务环境、任务可靠性要求等各不相同[3]。执行这类多阶段任务的系统被称为多阶段任务系统。多阶段任务系统在工业和军事上有着广泛的应用,如飞机[3-4]、卫星系统[5]、核电站[6]、某些地面武器装备[7-8]和无线传感器网络[9]等。根据任务成功性判定条件,可以将多阶段任务分为不可中断任务和可中断任务两类。在军事领域,典型的不可中断任务是战斗机执行的作战任务,若系统在执行任务过程中发生故障,则会导致任务失败,甚至机毁人亡;而一些地面武器装备,如火炮等,其任务是可中断的,若该类系统在任务过程中发生故障导致任务中断,且在规定的时间内能修好,则认为任务成功,否则,任务失败。值得注意的是,在某些情况下,虽然任务本身是可以中断的,但是由于受到一些限制条件(如缺少维修资源),导致系统在任务过程中出现故障时无法修复,最终导致任务失败,这类情况,也可以看作不可中断任务。
关于多阶段任务评估的文献研究较多,张涛等[7]提出了一种一次性生成多阶段任务系统二元决策图(BDD)的新算法来评估任务可靠度;郭波等[10]采用解析法,研究了备件组合方案与多阶段任务成功性的关系;齐建军等[11]研究了将串联可修系统多阶段任务转换为单阶段任务评估系统可靠度的方法;Xing等[3]采用BDD法,建立了存在共因失效时的多阶段任务可靠度评估模型;Lu等[12-13]研究了基于解析法的可修系统多阶段任务可靠度评估模型;钟季龙等[14]研究了基于BDD的装备体系多阶段任务可靠度问题,并用递归法改进求解过程,提高计算效率。从目前的研究来看,大多数文献假设任务剖面(如任务持续时间)是确定的,且很少考虑外部工作环境对任务的影响,这显然与实际情况不符。特别是对武器装备来说,其作战任务具有较强的随机性,因此,本文以武器装备中多阶段任务系统为研究对象,考虑任务剖面的随机性,从以下3个方面对文献[3]中多阶段任务进行扩展研究:
1)考虑任务持续时间的随机性。武器装备的任务由多个阶段组成,每个阶段任务持续时间长度服从某一分布;
2)考虑外部环境的随机性。在任务过程中,存在引起装备多部件同时失效的外部共因失效事件(如敌方火力打击),且该事件按指数分布到达,会以一定的概率造成装备中多部件同时故障;
3)考虑两种不同的任务类型。考虑到武器装备系统的不同任务特性和保障条件,研究了可中断多阶段任务和不可中断多阶段任务两类任务的任务成功概率评估流程。
1 任务成功概率评估指标及评估方法
本文重点讨论两类比较有代表性的任务:1)不可中断任务,主要针对任务过程中不具备维修保障条件、缺乏维修资源或任务本身不允许中断这类情况;2)有限制的可中断任务,主要是针对任务过程中允许中断且任务允许中断时间受限这类情况。因此,对于不可中断任务来说,任务成功概率等于系统在任务持续时间内无故障的概率;对于可中断任务来说,其任务成功概率为装备在任务持续时间内无故障或者发生故障但在规定的条件下能修好的概率。从这两类任务的适用背景看,采用Peterson[15]和Wohl[16]定义的可信性作为任务成功概率的衡量指标较合适。可信性定义为系统无故障或发生故障后在规定的时间内修好的概率。根据可信性定义,装备任务成功概率表达式为
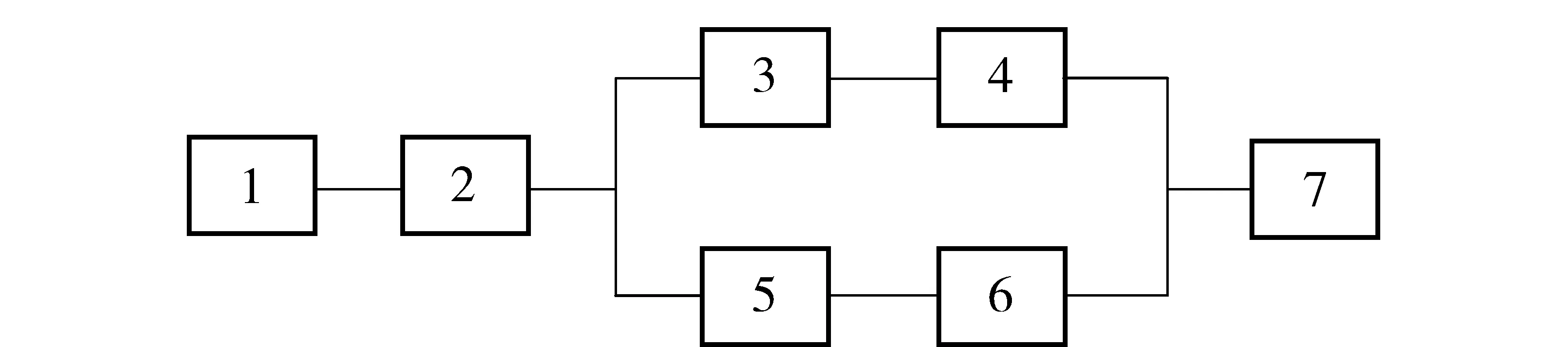
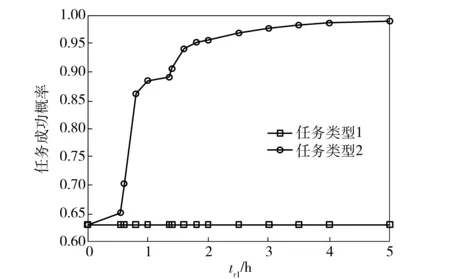
Ds=R+(1-R)P(tr (1) 式中:Ds表示系统任务成功概率;R为系统任务可靠度;tr为系统故障时总维修时间;trl为任务允许中断时间;P(tr 广义上来说,多阶段任务可靠度的评估方法可以分为两大类:解析法和仿真法[17]。解析法又可分为:状态空间法、组合法和将二者相结合的方法[18]。对于复杂系统和复杂任务过程来说,解析法的建模过程比较复杂,甚至会出现无法得到准确解析模型的情况;而仿真法则能够灵活地描述各类任务过程,且实现起来较简单。因此,本文采用仿真法对任务成功概率进行评估。 假设某装备具有如图1所示的系统结构,其任务过程包括5个阶段:行军、展开、射击、撤收和撤离。其中行军和撤离需要部件1工作,展开和撤收阶段需要部件2工作,射击阶段需要部件2~部件7同时工作,如图2所示。在任务阶段3(射击)中,系统会遭受两类导致系统多部件同时故障的外部事件(如人员操作失误和敌方火力打击)。由同一共因失效事件导致同时故障部件的组合,称为一个共因失效组,如共因失效事件1和2的共因失效组分别为{3,4}和{2,3,4,5,6,7},即共因失效事件1和2的发生会以一定概率分别导致部件{3,4}和{2,3,4,5,6,7}的同时故障。 图1 系统结构Fig.1 System structure 图2 多阶段任务剖面Fig.2 Mission profile of phased mission 针对该问题,作以下假设: 1)系统和各部件只存在两个状态,即故障或完好,且各部件之间相互独立; 2)各任务阶段的持续时间和共因失效事件的产生均服从指数分布; 3)部件3和部件4寿命服从指数分布,故障后只能进行更换,其他部件寿命服从威布尔分布,故障后进行最小维修; 4)各任务阶段严格按时间顺序执行,且各部件在上一任务阶段结束和下一任务阶段开始时的状态相同。 本文采用蒙特卡洛方法产生随机事件,对不可中断随机多阶段任务(类型1)和可中断随机多阶段任务(类型2)两类任务过程进行仿真建模,得到任务成功概率。这里以第2节中介绍的5阶段任务为例,在分析一般任务过程的基础上,得出两类任务的详细仿真流程。 3.1 任务成功概率评估一般流程 假设系统及任务参数均已知。任务成功概率评估一般流程(见图3)如下: 1)根据已知的系统参数和任务参数,采用蒙特卡洛方法产生随机事件,主要包括各部件剩余寿命T={Tk},各任务阶段的时间长度Tp={tdω},共因失效事件i发生时刻Te={Te(i)}等; 3)记录当前仿真次数m,重复上述过程n次,记录任务成功次数ns; 4)计算任务成功概率Ds=ns/n. 图3 任务成功概率评估一般流程Fig.3 A general procedure of assessing mission completion success probability 图4 两种任务类型下的系统和任务状态Fig.4 System and mission states for two kinds of missions 3.2 任务类型1的成功概率评估流程 对于不可中断任务来说,任务执行过程中不允许中断,同时意味着任务过程中不能对故障部件进行维修,因此,系统在任意任务阶段发生故障均会导致任务失败。仿真流程如图5所示,具体过程如下: 1)设置仿真总次数n的值,并将当前仿真次数m和任务成功次数ns的值置0,输入部件k(k=1,2,…,κ)的工龄Ak,κ为系统部件总数; 2)若m 3)根据各部件的寿命分布参数(ηk表示服从威布尔分布的部件k尺度参数,mk表示服从威布尔分布部件k的形状参数,fk(λk,Tk)表示服从指数分布部件k的故障密度函数,λk为故障率)和任务参数及分布(gω(λdω,tdω)表示任务阶段ω持续时间的概率密度函数,λdω为分布参数,λci为共因失效事件i发生的分布参数,εi表示在共因失效事件i发生的条件下,导致多部件同时故障的概率),采用蒙特卡洛法产生随机变量T={Tk},Tp={tdω}和Te={Te(i)}; 5)如果ω=1,根据任务阶段ω的系统结构函数φ(X,ω),计算系统s在任务阶段ω的状态Xs(1)=φ(X,1)=X1(1).ω=ω+1,如果Xs(1)=1,则执行第6步,否则执行第12步; 图5 任务类型1的任务成功概率仿真流程Fig.5 Simulation procedure of assessing mission completion success probability of Mission 1 6)如果ω=2,则计算Xs(2)=φ(X,2)=X2(2),且ω=ω+1,如果Xs(2)=1,则执行第7步,否则执行第12步; 7)判断共因失效事件1是否发生,若事件1发生且引起了共因失效,则修改共因失效事件1对应的共因失效组内部件状态; 8)判断共因失效事件2是否发生,若事件2发生且引起共因失效,则执行第12步,否则执行第9步; 9)如果ω=3,则计算 Xs(3)=φ(X,3)=X2(3)[1-(1-X3(3)·X4(3))(1-X5(3)X6(3))]X7(3),且ω=ω+1. 如果Xs(3)=1,则执行第10步,否则执行第12步; 10)如果ω=4,则计算Xs(4)=φ(X,4)=X2(4),且ω=ω+1,如果Xs(4)=1,则执行第11步,否则执行第12步; 11)如果ω=5,则计算Xs(5)=φ(X,5)=X1(5),如果Xs(5)=1,则ns=ns+1; 12)m=m+1跳转到第2步; 13)计算任务成功概率Ds=ns/n. 3.3 任务类型2的成功概率评估流程 任务类型2的任务成功概率仿真评估流程与任务类型1相似,其区别在于,当系统在执行任务过程中发生故障后,会实施维修,并判断对系统进行最小维修(即使系统恢复到可用状态所需时间最少所对应的方案)所需的累计维修时间是否在任务允许中断时间内。若满足要求,则实施维修,并继续执行任务,否则,定义该次任务失败。仿真流程如图6所示,详细过程如下: 1)设置仿真总次数n的值,并将当前仿真次数m和任务成功次数ns的值设置为0,输入各部件工龄Ak; 2)若m 9)m=m+1,跳转到第2步; 10)计算任务成功概率Ds=ns/n. 需要注意的是,在仿真过程中,累计维修时间大于任务允许中断时间,即tr>trl,是一个硬性中断条件。当满足tr>trl,结束当前任务仿真,认为该次任务失败。若系统在任务过程中故障且满足tr≤trl,则对系统进行最小维修,并更新维修部件的状态信息。然后,用蒙特卡洛法重新产生维修后部件的剩余寿命,如此循环进行,直到满足任务中止条件为止,即任务失败(tr>trl)或任务成功。 图6 任务类型2的任务成功概率仿真流程Fig.6 Simulation procedure of assessing mission completion success probability of Mission 2 为了验证第3节中建立的任务成功概率评估仿真流程的正确性,仍采用第2节描述的算例进行分析。设置总仿真次数n=100 000,任务类型2允许中断时间trl=1.00 h,图2中所示系统中部件的分布 参数、维修时间及任务参数分别如表1和表2所示。这里利用Matlab对第3节中的两类任务成功概率仿真流程进行了编程实现,得到任务成功概率值。 表1 部件分布参数和维修时间Tab.1 Distribution parameters and repair time of components 表2 任务参数Tab.2 Mission parameters 根据图5和图6所示的仿真流程,得到两种任务类型的任务成功概率分别为0.63和0.88. 从结果可以看出,该仿真评估方法可用于随机共因失效条件下,可中断和不可中断随机多阶段任务的成功概率评估,验证了该方法的有效性;对比两类任务的成功概率值,可得出可中断任务的任务成功概率要显著大于不可中断任务的成功概率,与实际情况相符,验证了仿真流程的正确性;该结果也反映出,在执行任务过程中,及时对故障装备进行维修,可显著提高任务成功概率。 4.1 任务参数λdω对任务成功概率的影响 在这类随机任务中,参数λdω决定了各任务阶段的持续时间长度。为了分析不同任务阶段长度对系统任务成功概率的影响,这里仿真了不同λdω值下的任务成功概率,仿真结果如图7所示。 图7 参数λdω对任务成功概率的影响Fig.7 Effect of λdω on mission completion success probability 从图7中可以看出,在不同任务阶段,系统任务成功概率随参数λdω的变化趋势是相似的,即随着λdω的增加,系统任务成功概率先增加后趋于稳定,即任务时间越短,任务成功概率越高;不论该参数如何变化,相同的λdω值下,任务类型2的任务成功概率始终大于任务类型1的任务成功概率。因此,在实际装备管理过程中,当多个不同状态装备组成的装备群执行多个具有不同任务参数的任务时,可以采用该评估方法评估每个装备执行不同任务的成功概率,在此基础上,优化任务分配,从而提高装备群的任务成功概率。 4.2 任务允许中断时间trl对任务成功概率的影响 通过对比两种任务类型的任务成功概率可知,任务过程中实施维修能够显著提高任务成功概率,但是装备在执行任务过程中,允许中断的时间往往有限。为了分析任务允许中断时间对任务成功概率的影响,仿真了不同任务允许中断时间下任务成功概率值,结果如图8所示。 图8 任务允许中断时间对任务成功概率的影响Fig.8 Effect of trl on mission completion success probability 对于任务类型1(即不可中断任务)来说,任务中断即失败,因此,任务允许中断时间对其任务成功概率无影响,即任务成功概率始终保持不变,为一直线;而对于任务类型2(即可中断任务)来说,由于系统故障导致任务中断后,如果规定的任务允许中断时间trl越长,其修好的概率越大,即任务成功概率越高,因此,任务成功概率随着任务允许中断时间的增加而增加。另外,从图8中可以看出,当0 h≤trl≤1.60 h时,增加trl的值可以显著提高可中断任务的任务成功概率;而当trl>1.60 h时,随着trl的增加,任务成功概率增加较缓慢。而且,任务允许中断时间的增加必然会带来一些负面影响,如维修保障器材携行量的增加,任务效果的降低等,因此,基于该分析结果,决策人员可根据实际情况,对任务成功概率和由增加任务允许中断时间带来的负面影响进行综合权衡。 本文研究了随机条件下多阶段任务成功概率仿真评估方法,建立了存在随机共因失效条件下,不可中断和可中断随机多阶段任务的任务成功概率评估流程,并结合算例对其进行了验证,分析了各任务阶段时间分布参数、任务允许中断时间对任务成功概率的影响。算例结果表明: 1)该仿真评估方法和提出的仿真评估流程,可实现对不可中断和可中断随机多阶段任务成功概率评估,能有效解决复杂任务的任务成功概率评估问题。 2)可中断任务的任务成功概率明显高于不可中断任务,且任务成功概率随任务持续时间长度的减少而增加。 3)对于可中断任务来说,任务成功概率随着任务允许中断时间的增加而增加,最后趋于稳定,而任务允许中断时间对于不可中断任务的任务成功概率没有影响。 仿真结果与实际情况相符,验证了仿真评估方法和仿真评估流程的正确性,可用于解决装备随机多阶段任务成功概率评估、面向任务的维修保障资源规划和装备任务分配等任务规划类问题。 References) [1] Xing L D, Dugan J B. Analysis of generalized phased-mission systems reliability, performance and sensitivity[J]. IEEE Transactions on Reliability, 2002, 51(2): 199-211. [2] 杨春晖, 杨建军, 姚璐. 多阶段任务系统通用可靠性仿真模型[J]. 北京航空航天大学学报, 2011, 37(12):1562-1568. YANG Chun-hui, YANG Jian-jun, YAO Lu. General model for PMS reliability[J]. Journal of Beijing University of Aeronautics and Astronautics, 2011, 37(12):1562-1568. (in Chinese) [3] Xing L D, Levitin G. BDD-based reliability evaluation of phased-mission systems with internal/external common-cause failures[J]. Reliability Engineering and System Safety, 2013, 112: 145-153. [4] Xing L D. Reliability evaluation of phased-mission system reliability, performance and sensitivity[J]. IEEE Transactions on Reliability, 2007, 56(1): 58-68. [5] 朱海鹏. 基于BDD的多阶段任务系统可靠性建模分析[D]. 成都:电子科技大学, 2010. ZHU Hai-peng. BDD-based reliability analysis of phased-mission system[D]. Chengdu: University of Electronic Science and Technology of China, 2010. (in Chinese) [6] Xing L D, Amari S V, Wang C N. Reliability of k-out-of-n systems with phased-mission requirements and imperfect fault coverage[J]. Reliability Engineering and System Safety, 2012, 103(3): 45-50. [7] 张涛, 郭波, 谭跃进, 等. 一种基于BDD的多阶段任务系统可靠度新算法[J]. 系统工程与电子技术, 2005, 27(3): 446-448. ZHANG Tao, GUO Bo, TAN Yue-jin, et al. New BDD-based algorithm for reliability analysis of phased-mission systems[J]. System Engineering and Electronics, 2005, 27(3): 446-448. (in Chinese) [8] 张涛, 郭波, 武小悦, 等.k阶段变化条件下k/N∶G系统的备件保障度模型[J]. 兵工学报, 2006, 27(3): 485-488. ZHANG Tao, GUO Bo, WU Xiao-yue, et al. Spare availability model fork-out-ofNsystem with differentkin different phases[J]. Acta Armamentarii, 2006, 27(3): 485-488. (in Chinese) [9] Wang C N, Xing L D, Levitin G. Probabilistic common cause failures in phased-mission systems[J]. Reliability Engineering and System Safety, 2015, 144:53-60. [10] 郭波, 张涛, 张泉, 等. 备件组合方案下的多阶段任务成功性评估模型[J].系统工程理论与实践, 2005, 25(2): 94-100. GUO Bo, ZHANG Tao, ZHANG Quan, et al. Phased-mission availability assessment model for system given limited spares [J]. System Engineering Theory & Practice, 2005, 25(2): 94-100. (in Chinese) [11] 齐建军, 谭林, 郭波, 等. 串联可修系统多阶段任务可靠性近似评估[J]. 深圳大学学报, 2013, 30(3): 268-274. QI Jian-jun, TAN Lin, GUO Bo, et al. An approximate method to assess the reliability of the multi-phased mission on the series repairable system[J]. Journal of Shenzhen University Science and Engineering, 2013, 30(3): 268-274. (in Chinese) [12] Lu J M, Wu X Y. Reliability evaluation of generalized phased-mission systems with repairable components[J]. Reliability Engineering and System Safety, 2014, 121:136-145. [13] Lu J M, Wu X Y, Liu Y L, et al. Reliability analysis of large phased-mission systems with repairable components based on success-state sampling[J]. Reliability Engineering and System Safety, 2015, 142:123-133. [14] 钟季龙, 郭基联, 王卓健, 等. 装备体系多阶段任务可靠性高效解析算法[J].系统工程与电子技术, 2016, 38(1): 232-238. ZHONG Ji-long, GUO Ji-lian, WANG Zhuo-jian, et al. Research on phased mission based efficient reliability evaluation algorithm for equipment system of systems[J]. System Engineering and Electronics, 2016, 38(1): 232-238. (in Chinese) [15] Peterson E L. Maintainability application to system effectiveness quantification[J]. IEEE Transactions on Reliability, 1971, 20(1): 3-7. [16] Wohl J G. System operational readiness and equipment dependability[J]. IEEE Transactions on Reliability, 1966, 15(1): 1-6. [17] 聂成龙, 张柳, 于永利, 等. 多阶段任务系统任务持续能力仿真模型研[J]. 系统仿真学报, 2008, 20(3): 729-732, 737. NIE Cheng-long, ZHANG Liu, YU Yong-li,et al. Research on PMS mission sustainability simulating methods[J]. Journal of System Simulation, 2008, 20(3): 729-732, 737. (in Chinese) [18] Misra K B. Handbook of performability engineering[M]. Berlin, GE:Springer Publishing Company, 2008. Research on Simulation of Mission Completion Success ProbabilityAssessment for Random Phased-mission CAO Wen-bin1, JIA Xi-sheng1, HU Qi-wei1, CHEN Bing2 (1.Department of Management Engineering, Ordnance Engineering College, Shijiazhuang 050003, Hebei, China2.Unit 65185 of PLA, Shenyang 110000, Liaoning, China) Phased-mission system extensively exists in modern industrial and military fields, and it is of great practical significance to get its mission completion success probability for system performance evaluation and mission scheduling. Taking some special characteristics of mission profile of weapon systems into consideration, the mission completion success probability assessments of two kinds of missions under random condition are addressed. The simulation procedures of interruption inadmissible and interruption permitted random phased-missions subjected to random common-cause failures are proposed. Additionally, the simulation procedures are achieved by Matlab programming. An illustrative example is presented to verify the validity of the proposed procedures. The effects of parameters associated with phased-mission on the mission completion success probability are discussed. The results show that the proposed method can be adopted to assess the mission completion success probability of interruption permitted or inadmissible random phased-mission, and provides an alternative approach to success completion probability assessment of complicated mission. The reasonable mission scheduling can improve system’s mission completion success probability which is shown to be important for practical equipment support and management. ordnance science and technology; simulation approach; random phased-mission; common cause failure; mission completion success probability 2016-09-20 国家自然科学基金青年科学基金项目(71401173) 曹文斌(1988—), 男, 博士研究生。 E-mail: wbyzq@foxmail.com 贾希胜(1964—), 男, 教授, 博士生导师。 E-mail: xs_jia@hotmail.com E92 A 1000-1093(2017)05-1002-09 10.3969/j.issn.1000-1093.2017.05.0212 问题描述

3 随机多阶段任务成功概率仿真评估











4 算例分析



5 结论
