二自由度牵引装置在轨道运行中的应用
2017-06-05邱雷
邱雷
(山东康威通信技术股份有限公司 山东 济南 250101)
二自由度牵引装置在轨道运行中的应用
邱雷
(山东康威通信技术股份有限公司 山东 济南 250101)
对隧道内轨道上吊挂的巡检设备在通过弯道时可能出现的车身与轨道之间的干涉进行了分析,包括水平弯道和坡道提出了二自由度牵引装置的结构方案,并对车身的前后轮组在弯道上的情况分别进行了分析,提出了轮组转轴相对于车身转向角度在两种自由度下的运算方法,对车身能满足的弯道最小半径进行求解。
轨道交通;二自由度;牵引装置
轨道交通设备,尤其对于隧道或管廊内的巡检设备,因隧道内空间狭窄弯曲,巡检设备在行驶过程中会不可避免的遇到弯道问题,一般隧道或管廊的水平方向的弯道半径变化较大,有的值在几米之间,甚至有直角弯,这种情况就取决于隧道的宽度,如隧道是2米宽度,则其中心线对应的转弯半径就只有1米。巡检设备的轨道,其一般是安装在隧道中心线位置,则轨道弯道的极限半径就只能是1米,这对于在其上运行的设备而言是一个很大的挑战。因为凡是巡检设备的车体结构,都是具备前轮及后轮的,必然会存在前后轮距,当经过弯道时,前后轮距就会形成弧形弯道上一根弦,弦的中心与其所对应的圆弧中心就会产生一段间距,这个间距K就是车体中心在弯道上的横向偏移,当这个横向偏移过大时,那么车体结构就很可能与轨道发生干涉,因为在平直轨道上行驶的车体结构件相对应轨道是存在一定距离的,当行至弯道时,由于横向偏移距离K的存在,当K过大时,超过了车体结构件与导轨的间距H时,两者之间就会发生干涉,导致车体不能在此弯道上通过。可以改变设计,使车体结构件与导轨间距K足够大,二者不至于形成干涉,但导轨宽度是固定的,车轮作为车体结构件的一部分,必然要在导轨的承载面运动,当导轨弯道R过小,前后轮距L过大时,由于间距K的影响,车轮会非常有可能偏离承载面,造成车体脱轨,甚至会导致严重事故。
同样因为隧道通常会有落差,尤其在隧道衔接处会有工作井的出现,使得隧道通过工作井或落差大的隧道时也不可避免的出现轨道的坡道,当坡道过于陡峭时,不仅考验车体的驱动力,也挑战了车体的通过性能,因为同样安装于车体的结构件会与导轨承载面发生干涉,尤其是对于车体经过坡道结束时的拐点时,如果车体的轮式结构之间连接为刚性结构连接时,由于车体重心尚未经过拐点,则后轮与重心的作用,往往会使前轮翘起,并对导轨的承载面上施压,如果这时前轮不是驱动轮,影响不是太大,后轮的驱动力会使车体重心通过拐点,前轮会因重力作用落在导轨支撑面上,如果这时前轮是驱动轮,那么前轮的驱动就会形同虚设,造成动力不足,如果前轮是车体唯一的驱动轮,那么车体在经过此拐点时不仅不会前进,车体还会因为没有动力而卡死,或者倒退。
另一种情况就是车体在行进过程中,车轮在经过坡道时如果不间断与导轨触碰或分离,必然会对车身形成颠簸,这对于车身装载的设备也会产生 不利影响,例如车载摄像机的晃动会影响视频质量。所以在弯道半径过小的情况下,如何提高车体在弯道上通过性能成为关键需要解决的问题。
本文提出一种让车体通过小弯道的解决方案,并对车体在行驶过程中遇到弯道时,进行简要的分析和论述。
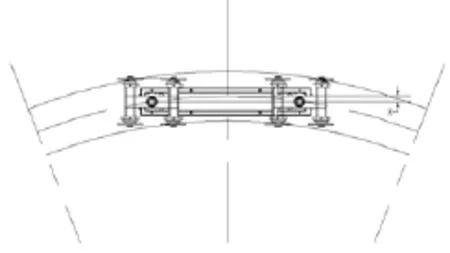
图1
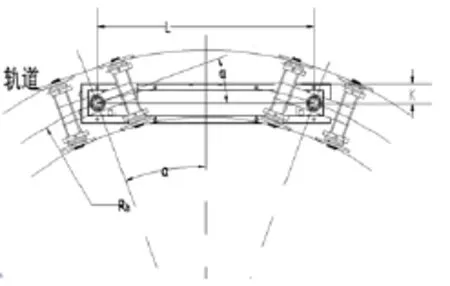
图2
如果我们将图1中的前后轮组在车架上的固定安装变换为图2中的形式,即前后轮组都可以在车架的装配中心为轴旋转,这种旋转角度在车架导向轮的作用下完全可以跟随轨道的走向而变,理论上两组前后轮组的中心线延长线的相交点便为弯道的圆心,此时前后轮组都会在弯轨的切线方向上进行滚动,这样就不会与弯轨发生干涉,而车架可以悬挂于前后轮组的下方,也等于说处于轨道的下方,那么对于前后轮组的中心距L而言,仍然可以保持不变,也可以说仍然保持了车身的刚性,前后轮组各自旋转并不影响车身内各种结构件的位置,而前后轮组却能以无干涉的状态通过轨道,能影响其不能通过的原因只有一点,那就是每一个轮组内部的前后轮距,对于一定半径的弯轨道而言,轮距越小,偏移量跟随其成正比,而这个前后轮距,相对于前后轮组之间距L而言,要小得多,这就能够大大缩小车身通过轨道的半径,提高了车身对隧道的适应性。
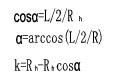
图2中,α=车架中心线与轮组中心线的夹角;L=两轮组间距;Rh=水平弯轨半径;K=车体经过弯道时与导轨中心线之间的理论偏移。
对于图2中我们可以根据三角函数求出α的角度及间距K,来确定我们需要在设计车身结构时,需要多大的角度,及车体结构上相关结构件相对于轨道做出多大的避让。上式求解比较简单,只要知道前后轮组间距L、轨道半径即可。
对于车体经过坡道时的情形,则与经过水平弯道不同,因为水平弯道时左右对车体进行限位,而经过坡道时,车体下方有导轨的支撑面,而车体上方是不存在限位的,所以不会发生像过水平弯道情况时的干涉,但存在一种情况是,当车身为刚性时,车轮在经过坡道时,会因为坡道的影响,车体重心发生某个车轮翘起的情况, 当车体经过坡道时,由于车身重心的存在,对于刚性固定的车轮,当重心与后轮尚未经过轨道的拐点时,前轮组很容易翘起,如果前轮组为驱动轮,那么会导致该轮组的摩擦力丧失,导致动力不足,或者伴随着车身前进,车轮离轨后又与轨面触碰,而造成车体行进中产生颠簸,如图,当车体经过圆弧顶时,前后轮组可根据坡道的变化,在竖直平面内自由转动,就能避免出现某个轮组行进中翘起的现象,从而保证动力及足够的摩擦力。同时,两个轮组车轮都能同时接触轨面,可避免车体在行进坡道上形成颠簸。
现将车体经过坡道时的几何关系说明如下:为了简化计算,将前后轮组简化成前后轮,之前图示中前后轮组的旋转中心轴即是图3前后轮的中心轴,当车体前轮处于图示中的拱形坡道时,根据三角函数,图示角度Β有如下计算关系。
图3
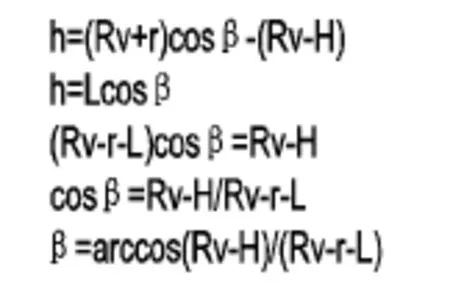
上式中,L=轮组间距;Rv=圆拱导轨半径;r=车轮半径;h=拱形导轨高度;β=车身在坡道上时与水平方向夹角。
这样可以在设计车身结构时,得出相关结构件相对于轨道做出多大的避让。如式中所述,只要知道拱形坡道的半径,前后轮距及车轮半径即可求得该角度,或者可以根据车身结构所能接受的最大限度的转向角度,来反求我们需要设计的坡道半径。
以上的计算方法和分析思路在实际工作是可行的,但是比较理想化的情况,在弯道上通过性的评价方法,没有考虑侧滑对轨道设备对弯道通过性的影响,在实际评价和制定方案时,应考虑一定裕度。以上的计算方法和分析思路是在理想二维平面内进行。在评价轨道设备在水平弯道通过性时,还应考虑在水平弯度变化的同时存在不存在坡道弯度的变化,当过水平弯道时前后轮组在竖直方向上的摆动角度有可能会造成两个自由度均存在变化。这种影响主要表现在前后轮组与车架之间存在的两个自由度联动时的干涉。在实际工作中往往是对隧道巡检设备在一段道路的通过性进行评价,因此首先是采用简单的测量工具方法进行初评,然后是采用准确的CAD制图模拟方法进行重点评价,最后是采用三维建模方法进行全面评价和验证,这样的评价方法既有重点又全面。优点是克服了隧道交通用设备在隧道内拐弯半径受限的问题,以及行进中遇到坡道驱动轮与导轨承载面不能充分接触的问题,拱形顶部车轮与承载面也能够做到紧密的接触,这对于保证隧道巡检机器人在轨道的稳定进行有着重要意义。
[1] 余志生.汽车理论[M].清华大学 .
[2]吉树祥.半挂汽车列车最小转弯直径计算与分析[J].江苏交通科技.
[3]胡钢.半挂汽车列车转向分析[J].专用汽车.
TD524
:A
:1671-0711(2017)05(下)-0093-02
