海底底质声学现场探测设备机械系统研究
2017-06-01薛钢,刘延俊*,,3,季念迎,张莹莹
薛 钢, 刘 延 俊*,,3, 季 念 迎, 张 莹 莹
( 1.山东大学 机械工程学院 高效洁净机械制造教育部重点实验室, 山东 济南 250061;2.山东拓普液压气动有限公司, 山东 济南 250061;3.山东大学 海洋研究院, 山东 济南 250100 )
海底底质声学现场探测设备机械系统研究
薛 钢1, 刘 延 俊*1,2,3, 季 念 迎2, 张 莹 莹2
( 1.山东大学 机械工程学院 高效洁净机械制造教育部重点实验室, 山东 济南 250061;2.山东拓普液压气动有限公司, 山东 济南 250061;3.山东大学 海洋研究院, 山东 济南 250100 )
海底底质声学特性在海洋工程勘察、海底资源勘探开发、海洋军事国防建设等方面具有重要的应用价值.随着海洋事业的发展,对海底底质声学现场探测设备的要求也越来越高.首先介绍了所研制的海底底质声学现场探测设备的机械系统,然后基于AMESim和Workbench联合分析,确定了机械系统的工作荷载,以滑轮组支架为例进行了优化.研究表明,经过仿真优化,能够大幅度降低机械系统总质量,延长设备水下作业时间.研究成果对海底底质声学现场探测设备机械系统设计具有参考价值.
海底底质;机械系统;优化设计;有限元分析
0 引 言
海底底质声学特性在海洋工程勘察、海底资源勘探开发、海底环境监测以及军事国防建设等领域具有重要的应用价值[1-2].目前,声学探测方法已经广泛应用于海洋探测和调查工作中,尤其是在大尺度探测、浅地层剖面等领域,已经形成了比较成熟的技术[3-4].董楠等开展了浅海跃层底质对水下声学特性的影响研究工作[5],Bae等进行了海洋沉积环境与海底沉积物声学特性相关性的研究[6].与样品的实验室测试相比,海底底质声学现场探测对沉积物扰动小,能够保持现场环境,测量数据可靠,已成为底质声学特性测量和调查的发展趋势,对底质声学现场探测设备的需求也越来越高.
在底质声学现场探测设备研发方面,吴炳昭等研制了一种走航式海底表层底质声学探测设备,能够实时探测水深小于100 m的浅层底质[7].郭常升等设计了包含水上主控子系统和水下测量子系统的底质声学参数测量系统,用来测量海底沉积物的声速和声衰减参数[8].美国海军研制的现场沉积地质声学测量系统(ISSAMS)能够测量横、纵波速/衰减等参数,已经过海试验证[9].由北欧多国参与,瑞典和挪威主要实施的ESMAC项目也侧重于海底沉积物测量设备的研制[10].中国科学院海洋研究所研制的一种海底底质声学参数原位测量系统,能够快速灵活地原位获取海底底质物理参数,系统测量值相对误差仅为0.04%[11-12].
为使海洋装备在海洋多变荷载作用下能够稳定工作,在设备投入使用前,必须对结构进行优化设计.目前,海洋装备的优化设计大多基于其水动力性能[13],而海底沉积物测量设备的结构力学特性是影响其使用性能的关键,针对该方面的研究报道较少.利用有限元法进行结构力学分析的方法已较为成熟,已经开发出了Workbench、ABAQUS等商用软件.此外,海洋装备中大量使用液压系统作为动力源,液压系统动力特性对海洋装备结构性能的影响尤为重要,而AMESim软件也能够精确获得液压系统的动力学特性.
本文所研究的海底底质声学现场探测设备整机质量2 000 kg,工作水深500 m,声学探杆最大下插深度1 400 mm,最大下插力15 000 N,利用液压系统和行程放大机构将安装有声学换能器的声学探杆插入到海底沉积物中,然后进行声波的发射、接收和采集工作,从而实现底质声学参数的现场测量.本文利用AMESim和Workbench联合仿真,对所研制设备的机械系统进行优化分析.
1 机械系统组成
1.1 机械结构
海底存在复杂的洋流,为提高水下工作的稳定性,设备的外形设计为六棱柱框架结构,如图1(a) 所示.根据设备控制单元、声学单元等部件的结构要求,上、下底面六边形的尺寸设计为2 070 mm(对角)×1 800 mm(对边).根据声学探杆的行程要求,机架总体高度设计为2 000 mm.
设备工作时,深水电机带动柱塞泵,从而驱动液压缸动作,利用行程放大机构扩大声学探杆的行程,使得声学探杆最大伸出长度达1 400 mm,如图1(b)所示.


(a) 框架

(b) 声学探杆
为方便对机械系统进行优化设计,利用Solidworks软件对设备进行建模,其主要机械部分包括机架、行程放大机构、声学探杆、液压缸、液压舱以及为液压系统提供信号的控制舱,如图2所示.
1.2 行程放大机构
在海底工作时,设备的整体高度不宜过高.为保证声学探杆能够达到沉积物中的预定贯入深度,同时尽量降低设备的整体高度,以提高设备在海底的稳定性和贯入传动的平稳性,设计了由滑轮组组成的行程放大机构,以扩大声学探杆的行程,如图3所示.
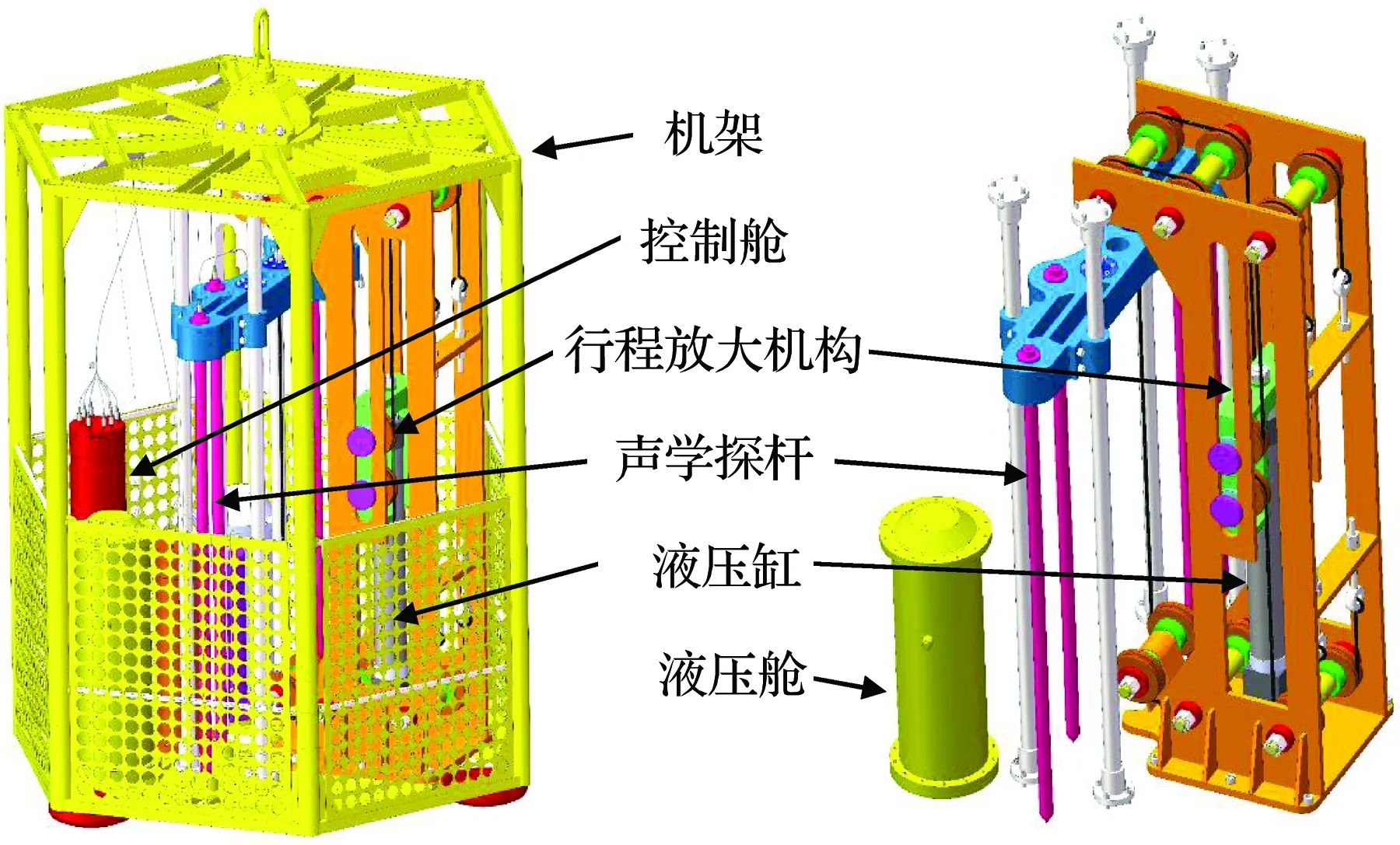
图2 海底底质声学现场探测设备三维模型
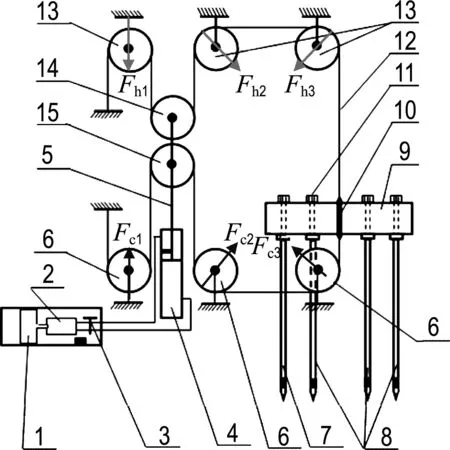
1 深水电机;2 液压泵;3 电磁阀;4 液压缸;5 活塞杆;6 下定滑轮组;7 发射探杆;8 接收探杆;9 活动压盘;10 锁紧卡环;11 水密插头;12 传动钢丝绳;13 上定滑轮组;14 上动滑轮;15 下动滑轮
图3 行程放大机构
Fig.3 Stroke amplification mechanism
声学探杆包括发射探杆和接收探杆,均固定在活动压盘上,同时下插或上提.上动滑轮和下动滑轮固定在一起.钢丝绳通过锁紧卡环与活动压盘固定连接.当声学探杆下插时,液压缸活塞杆伸出,通过钢缆和滑轮组带动活动压盘向下运动,声学探杆在活动压盘的压力下缓慢匀速插入海底沉积物中.当声学探杆上提时,液压缸活塞杆反向运动,通过钢缆和滑轮组带动活动压盘向上运动,即可将声学探杆提出沉积物.
下插过程中活塞杆的伸出力Fc,钢缆上的作用力Fcl,3个下定滑轮的受力Fc1、Fc2和Fc3(如图3所示)以及上提过程中活塞杆的缩回力Fh,钢缆上的作用力Fhl,3个上定滑轮的受力Fh1、Fh2和Fh3(如图3所示)的关系如下:
Fc=2Fcl,Fh=2Fhl
(1)
Fc1=Fc,Fh1=Fh
(2)
(3)
(4)
1.3 液压系统
声学探杆的动作由液压系统驱动,其原理图如图4所示.控制舱发出指令信号,深水电机和液压泵启动.控制单元控制电磁阀2DT通电,液压油经过单向阀和电磁阀,注入液压缸无杆腔使活塞杆伸出.通过位移传感器和压力传感器测量到的液压缸位移及工作压力,判断声学探杆下插深度及贯入力.当声学探杆下插到设定深度时,深水电机和液压泵关闭.工作完成后,深水电机和液压泵再次启动,电磁阀1DT通电,液压油注入液压缸有杆腔,活塞杆缩回,声学探杆提起,位移传感器检测到位后,深水电机和液压泵停止,完成一个工作过程.

1 充放油阀; 2 吸油滤油器; 3 压力补偿器; 4 浸油式深水电机; 5 液压泵; 6 单向阀; 7 压力传感器; 8 溢流阀; 9 电磁阀; 10 液控单向阀; 11 安全阀; 12 油箱; 13 排气阀; 14 油阻尼; 15 液压缸; 16 位移传感器
图4 液压系统原理图
Fig.4 Principle diagram of hydraulic system
在本液压系统中,选定的液压泵额定压力为50 MPa,理论流量为8.95 L/min;液压缸缸径为80 mm,活塞杆杆径为50 mm,溢流阀最大调压为21 MPa.
2 分析结果与讨论
2.1 AMESim分析
AMESim软件是多学科领域复杂系统建模仿真平台,包含机械库、信号控制库、液压库等模块,可方便地进行系统模拟仿真分析.本文利用AMESim软件对液压系统进行分析,以确定活塞杆的输出力,所建立的AMESim模型如图5所示.

图5 液压系统的AMESim模型
仿真过程中,控制电磁阀的输入信号,分别对活塞杆的伸出力和缩回力进行分析,如图6所示,其中图6(a)为伸出力,图6(b)为缩回力,缩回力方向与活塞杆伸出方向相反,故为负值.
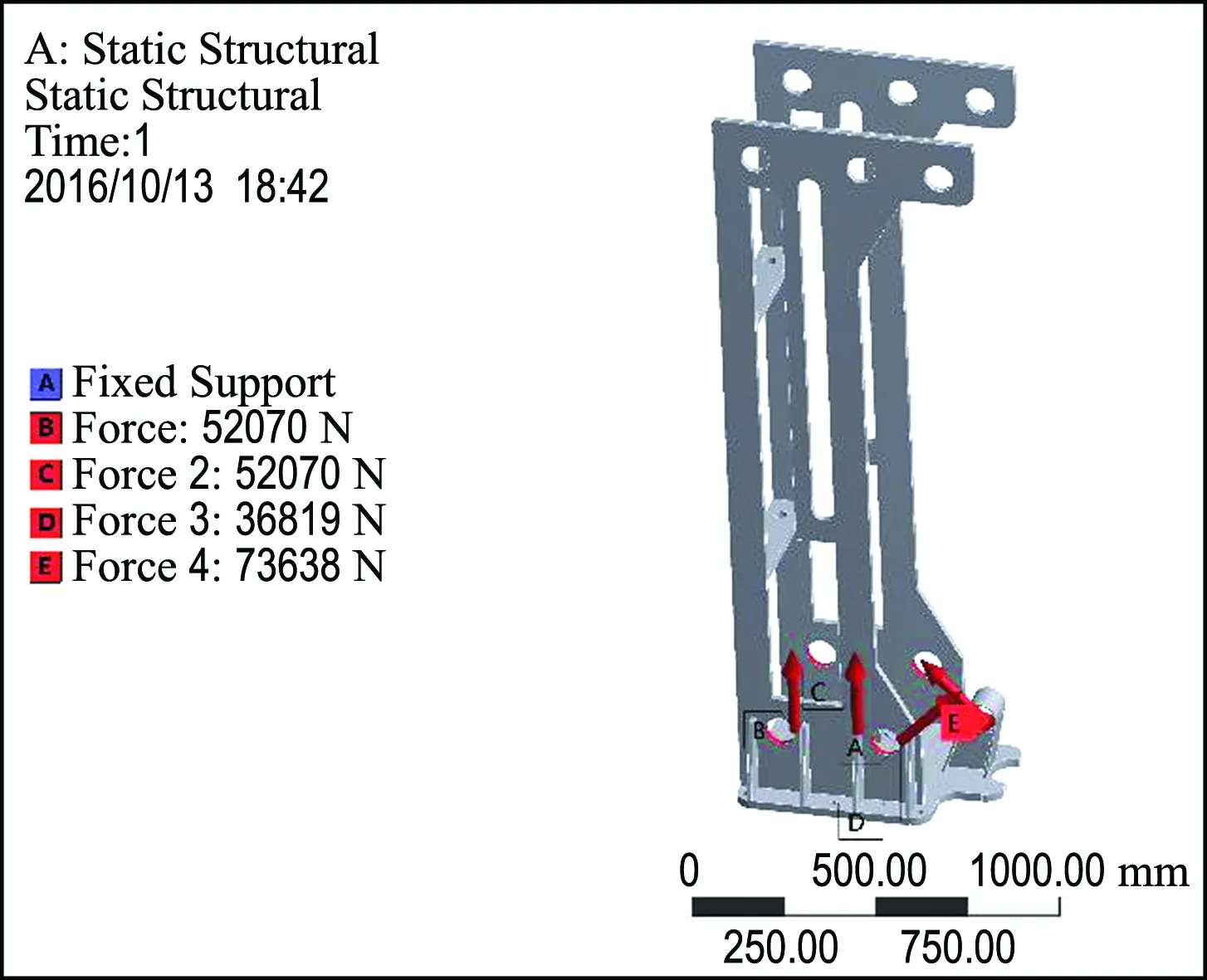
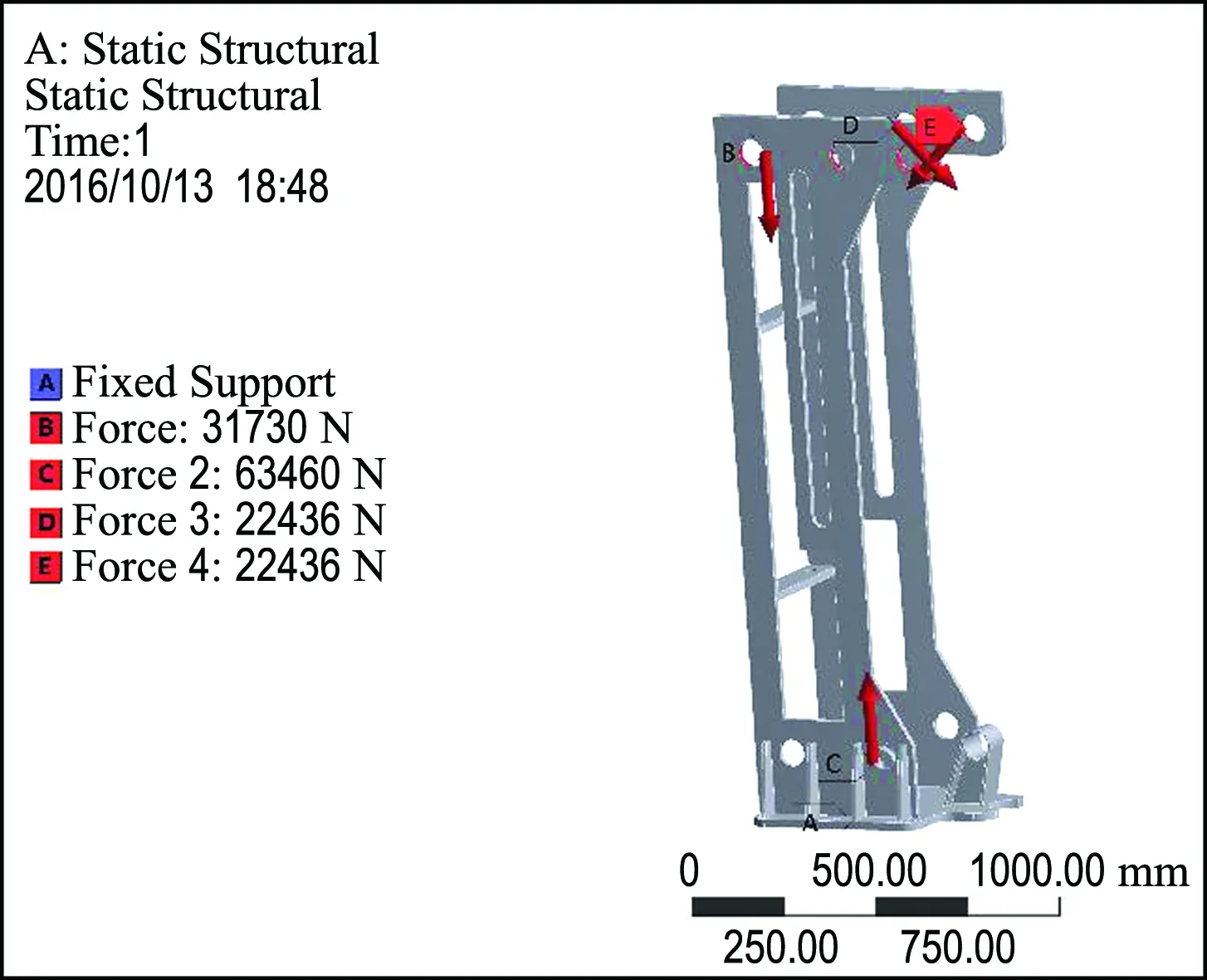
由分析结果可知,活塞杆的最大伸出力可达104 140 N,最大缩回力为63 460 N,通过行程放大机构,作用在声学探杆上的最大伸出力可达52 070 N,最大缩回力可达31 730 N.
2.2 Workbench分析
Workbench软件是基于有限元法开发的协同仿真平台,其中的static structure模块常用于机械结构分析.本文以滑轮组支架为例进行强度分析,并进行结构优化.为提高计算精度,不对模型进行简化,直接导入Workbench软件进行分析.根据2.1节的AMESim软件分析结果,滑轮组支架在声学探杆下插和上提的过程中,受力情况如图7所示,其中图7(a)为伸出过程的受力情况,图7(b)为上提过程的受力情况.
按照滑轮组支架在海底底质声学现场探测设备中的安装情况,滑轮组支架底面施加固定荷载.根据行程放大机构在滑轮组支架上的安装情况,按照图3中力的大小和方向分别施加力荷载.
此外,采用四面体网格对模型进行网格划分,最大网格尺寸为10 mm,并对局部区域进行网格加密处理,最终网格数为87 450个,节点数为164 826个.
2.3 结构优化
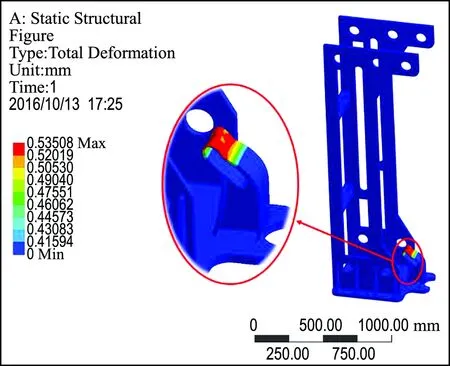
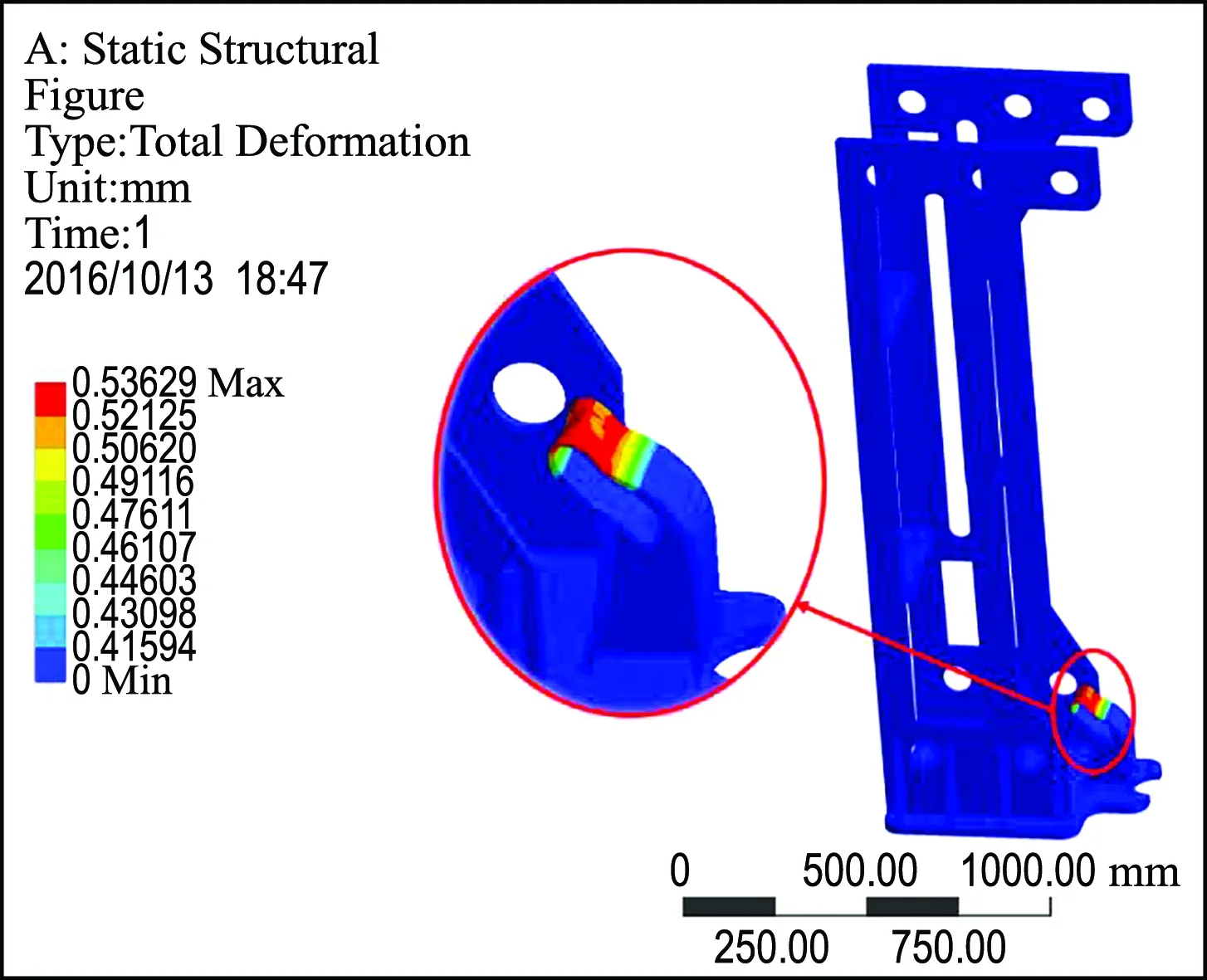
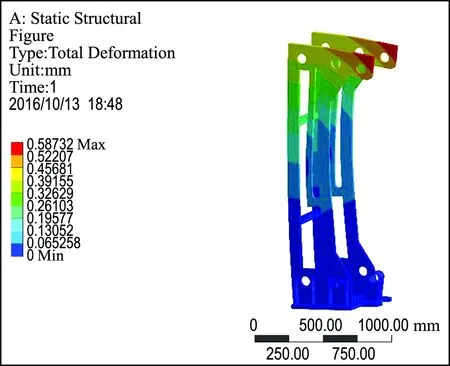
利用Workbench软件对原滑轮组支架壁厚减小5 mm后的滑轮组支架进行分析,分析结果如图8~11所示.其中,图8(a)、图9(a)、图10(a)、图11(a)分别为原滑轮组支架在声学探杆下插过程中滑轮组支架的变形分布和应力分布以及声学探杆上提过程中滑轮组支架的变形分布和应力分布,图8(b)、图9(b)、图10(b)、图11(b)分别为优化后的滑轮组支架在声学探杆下插过程中滑轮组支架的变形分布和应力分布以及声学探杆上提过程中滑轮组支架的变形分布和应力分布.
从分析结果可以看出,滑轮组支架壁厚减小后,在声学探杆下插过程中,结构变形和应力分布几乎不发生变化.而在声学探杆上提过程中,最大变形从0.587 32 mm增大到0.783 46 mm,增加了33.4%;最大应力从51.041 MPa增大到69.339 MPa,增加了35.8%,但变形量和应力值仍在许用范围内.通过减重优化,滑轮组支架总质量从320 kg减为267.2 kg,减轻了16.5%.滑轮组质量的降低,将减小液压系统的工作荷载,进而延长设备的水下作业时间.

(a) 伸出力

(b) 缩回力
(a) 伸出过程
(b) 上提过程
(a) 优化前
(b) 优化后

(a) 优化前

(b) 优化后
(a) 优化前

(b) 优化后
此外,利用AMESim和Workbench 联合分析,对海底底质声学现场探测设备的其他零件也进行了结构优化设计,结构优化前后的两台设备对比如图12所示.
本设备已在青岛附近海域进行了海试,声学探杆下插36次,实测最大下插深度1 398 mm,液压系统最高工作压力达到20.394 MPa,设备运行良好.

(a) 优化前

(b) 优化后

图12 结构优化前后的两台设备
3 结 语
本文介绍了所研制的海底底质声学现场探测设备的机械系统,重点分析了行程放大机构和液压系统.在确保设备海底稳定工作的前提下,行程放大机构扩大了声学探杆的下插深度.利用AMESim软件对设备的液压系统进行建模,分析了液压缸的最大作用力.使用Workbench软件进行结构强度分析,获取了滑轮组支架在工作状态下的变形值和应力分布.基于AMESim和Workbench 联合分析,对滑轮组支架进行优化,使其质量减小了16.5%,优化效果明显.本文为海底底质声学现场探测设备的机械系统优化提供了一种可借鉴的分析方法.
[1] JACKSON D R, RICHARDSON M D. High-Frequency Seafloor Acoustics [M]. New York: Springer, 2007.
[2] 谷明峰,郭常升,李会银. 海底松散沉积物声学性质原位测量实验研究[J]. 海洋科学, 2008, 32(5):1-5, 16.
GU Mingfeng, GUO Changsheng, LI Huiyin. Experimental research of in situ acoustic properties measurement of seafloor unconsolidated sediment [J]. Marine Sciences, 2008, 32(5):1-5,16. (in Chinese)
[3] 王润田. 海底声学探测与底质识别技术的新进展[J]. 声学技术, 2002, 21(1/2):96-98.
WANG Runtian. Progress in detecting the geological formations and sediment properties by sound [J]. Technical Acoustics, 2002, 21(1/2):96-98. (in Chinese)
[4] 王景强. 海底底质声学原位测量技术和声学特性研究[D]. 青岛:中国科学院海洋研究所, 2015.
WANG Jingqiang. Study of the in-situ acoustic measurement technique and geoacoustic properties of marine sediments [D]. Qingdao:Institute of Oceanology, Chinese Academy of Sciences, 2015. (in Chinese)
[5] 董 楠,张永刚,张健雪,等. 浅海跃层底质对水下声的影响研究[J]. 环境工程, 2012, 30(s1):165-167.
DONG Nan, ZHANG Yonggang, ZHANG Jianxue,etal. Research on impact of sound propagation under water by bottom sediment of shallow thermocline [J]. Environmental Engineering, 2012, 30(s1):165-167. (in Chinese)
[6] BAE S H, KIM D C, LEE G S,etal. Physical and acoustic properties of inner shelf sediments in the South Sea, Korea [J]. Quaternary International, 2014, 344(11):125-142.
[7] 吴炳昭,许 枫. 海底表层底质探测系统测试仪的设计[J]. 海洋测绘, 2007, 27(2):53-55.
WU Bingzhao, XU Feng. Design of the test instrument of the seabed sounding system of surface substrate [J]. Hydrographic Surveying and Charting, 2007, 27(2):53-55. (in Chinese)
[8] 郭常升,李会银,成向阳,等. 海底底质声学参数测量系统设计[J]. 海洋科学, 2009, 33(12):73-78.
GUO Changsheng, LI Huiyin, CHENG Xiangyang,etal. A design on an equipment for measuring acoustic properties of sea-floor sediment [J]. Marine Sciences, 2009, 33(12):73-78. (in Chinese)
[9] RICHARDSON M D, BRIGGS K B, BIBEE L D,etal. Overview of SAX99: Environmental considerations [J]. IEEE Journal of Oceanic Engineering, 2001, 26(1):26-53.
[10] 陶春辉,金翔龙,许 枫,等. 海底声学底质分类技术的研究现状与前景[J]. 东海海洋, 2004, 22(3):28-33.
TAO Chunhui, JIN Xianglong, XU Feng,etal. The prospect of seabed classification technology [J]. Donghai Marine Science, 2004, 22(3):28-33. (in Chinese)
[11] 中国科学院海洋研究所. 一种海底底质声学参数原位测量系统: 中国, 200910255767.8 [P]. 2009-12-25.
Institute of Oceanology, Chinese Academy of Sciences. A new type in-situ acoustic measurement system of seafloor sediments: CN, 200910255767.8 [P]. 2009-12-25. (in Chinese)
[12] 侯正瑜,郭常升,王景强,等. 一种新型海底沉积物声学原位测量系统的研制及应用[J]. 地球物理学报, 2015, 58(6):1976-1984.
HOU Zhengyu, GUO Changsheng, WANG Jingqiang,etal. Development and application of a new type in-situ acoustic measurement system of seafloor sediments [J]. Chinese Journal of Geophysics, 2015, 58(6):1976-1984. (in Chinese)
[13] 王言英. 深水浮式海洋平台水动力性能计算研究[J]. 大连理工大学学报, 2011, 51(6):837-845.
WANG Yanying. Research on computation of hydrodynamic performance for oceanic floating platform in deepwater [J]. Journal of Dalian University of Technology, 2011, 51(6):837-845. (in Chinese)
Research on mechanical system of seabed acoustic in-situ detection equipment
XUE Gang1, LIU Yanjun*1,2,3, JI Nianying2, ZHANG Yingying2
( 1.Key Laboratory of High-efficiency and Clean Mechanical Manufacture of Ministry of Education,School of Mechanical Engineering, Shandong University, Jinan 250061, China;2.Shandong Top Hydraulic & Pneumatic Co., Ltd., Jinan 250061, China;3.Institute of Marine Science and Technology, Shandong University, Jinan 250100, China )
Seabed acoustic property has valuable applications to marine engineering survey, ocean resource exploration, and maritime military defence construction. With the development of the marine affairs, the requirements for seabed acoustic in-situ detection equipment are increased. Firstly, the developed mechanical system of seabed acoustic in-situ detection equipment is introduced. Then, based on the co-analysis of AMESim and Workbench, the work loads of mechanical system are numerically calculated and the pulley bracket is optimized as an example. It is shown that the total mass of mechanical system reduces and the work time extends after the simulation optimization. The study results will do favor for the design of mechanical system of seabed acoustic in-situ detection equipment.
seabed; mechanical systems; optimization design; finite element analysis
1000-8608(2017)03-0252-07
2016-09-06;
2017-03-24.
海洋公益性行业科研专项(201405032).
薛 钢(1990-),男,博士生, E-mail:xuegangzb@163.com;刘延俊*(1965-),男,博士,教授,博士生导师, E-mail:lyj111ky@163.com.
TH766
A
10.7511/dllgxb201703006
