基于滑模控制的SRM直接瞬时转矩控制研究
2017-05-30於天浩吴国庆茅靖峰
於天浩,吴国庆,2,茅靖峰,谭 阳
(1.南通大学,南通 226019 2.江苏省风能应用技术工程中心,南通 226019)
0 引 言
开关磁阻电机(以下简称SRM)结构简单、变速运行范围宽、低速运行性能好、可靠性高、运行效率高,与其他电动机相比有自身优势,未来有望成为主流调速电动机[1]。但由于SRM的定子凸极结构和非线性电磁特性,其转矩波动较大限制了发展[2-3]。
本文引入直接瞬时转矩控制(以下简称DITC)方法,在SRM DITC转速外环引入动态滑模控制,以提高系统的动、静性能[7],如图1所示。传统抑制转矩波动的方法一般都是通过控制点电流、电压和角度间接控制转矩,因此很难精确控制转矩。DITC方法直接控制任意时刻的瞬时转矩,避免了优化电流等变量时需要的复杂算法[4-6];同时鉴于SRM具有四象限运行的特点,常规PID难以获得理想的性能。

图1 基于DITC的SRM系统框图
1 滑模控制速度调节器设计
1.1 滑模控制原理

图2 滑模变结构动态图
图2为滑模控制的基本原理图。假设系统滑模变量x是给定值与反馈值之间的偏差量。图2中原点O是滑模变量的终点。滑模面s取:

(1)
滑模控制量定义:
(2)

图2中的AO段为滑模控制下状态变量的轨迹。BA段是趋近运动,系统状态变量从B点运行到滑模面的A点。控制律ui+(x,t)或ui-(x,t),系统结构能够保持。
由滑模控制理论可知,对于任何一个无扰动非线性系统,有:

(3)
式中:x为状态量;u为输入量。
取滑模面:
s=cx
(4)
式中:c为滑模面参数,满足赫尔维茨多项式。那么把式(3)代入式(4)得:

(5)

ueq1=-(cb)-1cf(x)
(6)
而对于一个不确定非线性系统,往往满足如下方程:

(7)
式中:Δf(x)为系统自身变量;v为系统外部扰动。现将内外干扰综合考虑得d=Δf(x)+v,则式(7)可写为:

(8)
同理得到系统式(8)的等效控制:
ueq=-(cb)-1cf(x)-(cb)-1cd
(9)


(10)
为了加速系统收敛速率,本文采取指数收敛率:
(11)
这里,ε是任一大于0的常数;α是指数系数,且0<α<1。ε|s|α具有负反馈的特点,其绝对值大小决定了滑模函数运动过程中收敛速率。然后,选取雅普诺夫函数V=s2/2,可以得到:
(12)
因此,证明式(9)中的控制量能保证运动在滑模面上,并且能在有限的时间内收敛[8-10]。
1.2 滑模控制器设计

(13)

s(t,x)=cx1+x2
(14)
将式(14)两边同时求导得:
(15)
根据式(15)选择指数收敛率,可以计算推出控制量Tref的表达式:
(16)
2 DITC设计
2.1 不对称桥式功率变换器的相开关状态
本文采用不对称桥式功率变化电路,由相开关管VT1D,VT1U和续流二极管VD1D,VD1U组成,图3给出了一相绕组上的开关状态。
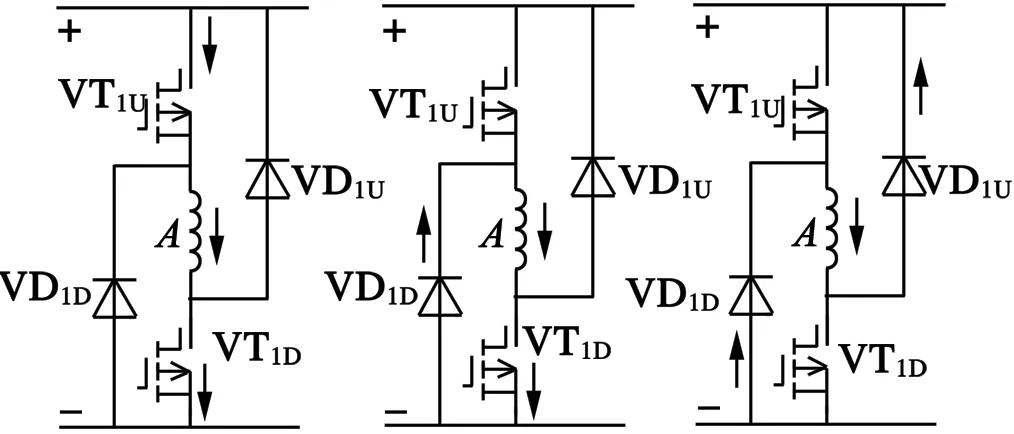
(a) S=1 (b) S=0 (c) S=-1
图3中,S表示开关状态。各相之间独立控制,简单可靠。同时,根据功率变换器工作过程,可以把开关动作分为3个状态:
(17)
2.2 转矩计算单元
在SRM的DITC中,瞬时转矩的计算非常重要,瞬时转矩估算公式:
(18)
式中:Tj为第j相瞬时转矩;θ为转子位置角;ij为第j相电流;W′(θ,ij)为磁共能。
由式(18)可知,W′(θ,ij)由θ和ij共同决定,当电磁路饱和时,磁化曲线呈严重非线性,很难实时解析磁共能,所以在忽略磁饱和的情况下,式(18)可简化:
(19)
以一相转矩特性为例,如图4所示,已知一相电流和角度则可得相瞬时转矩,其余6相依此计算,最终六相相加即为发电机瞬时转矩Ttotal。将Ttotal和Tref偏差值送入DITC单元,输出理想开关信号,系统转矩波动得以抑制。
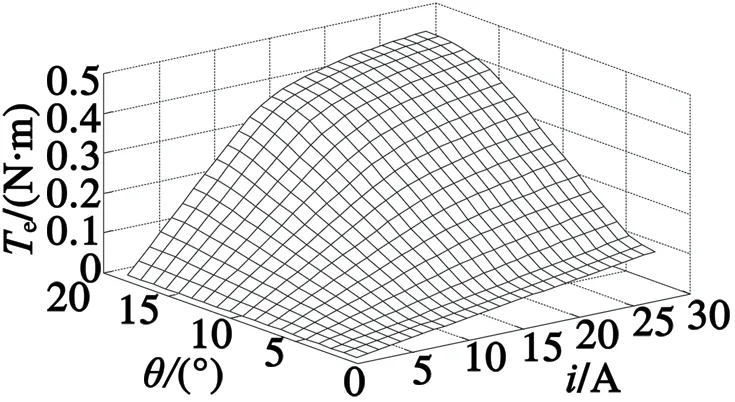
图4 转矩特性仿真模型
2.3 DITC单元
在SRM运行时,相电感根据角度位置的不同,可分为单相导通和换相导通区域,示意图如图5所示。

图5 转矩分配示意图
在不同的SRM运行模式下,需要采用不同的开关状态。电动模式下,不采用负电压,而在制动模式下,则需要采用负电压。图6为DITC电动运行转矩滞环示意图,令ΔT=|Tref|-|Tcst|,ΔT表示转矩偏差,相应的开关状态依据以下原则确定。

(a) 单相运行

(b) 两相即将关断切换

(c) 两相即将运行切换
在单相导通区域,开关状态如表1所示,转矩偏差进入DITC单元,控制单相导通区域Ttotal跟随Tref。

表1 单相区开关状态表
两相邻相同时运行的区域称为换相区,在换相区域,即将运行相具有增加转矩的优先权,所以其转矩滞环阈值小于即将关断相的阈值。表2显示了换

表2 换相区开关状态表
相区开关状态,假设初期两相(A,B)开关状态都是S=1。这样,通过DITC的开关调节,换相区的瞬时转矩也实现了控制。
3 仿真实验及分析
在MATLAB/Simulink环境下搭建了基于DITC的SRM控制系统,如图7所示。其参数设置: 开关磁阻发电机:六相(12/10),额定功率Pn=3 kW,额定电压Un=110 V,额定转速nN=500 r/min,相绕组电阻R=0.14 Ω,最大电感Lmax=30 mH,最小电感Lmin=4 mH,转动惯量J=0.008 1 kg/m2,摩擦系数μ=0.000 1;空气密度ρ=1.205 kg/m3。
在常规PI控制中,选定参数为Kp=8,Ki=5;采样时间Ts=1×10-6s。图8是ω=50 rad/s时常规PI控制器的转速和转矩,图9则是ω=50 rad/s时SMC控制器的转速和转矩。

图7 滑模控制SRM DITC系统仿真模型

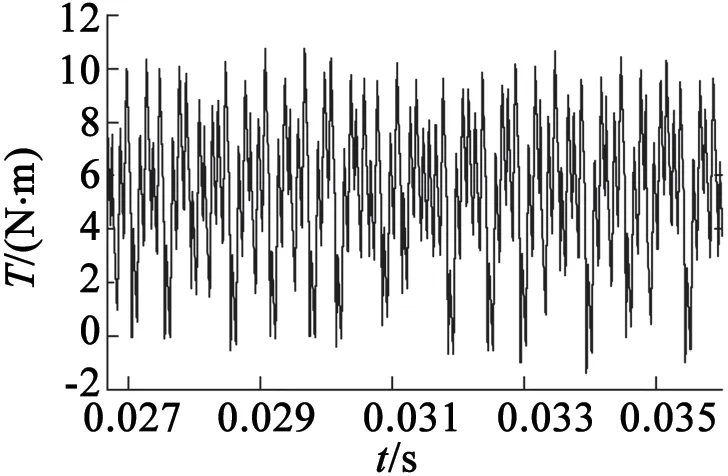
图8 DITC系统下,ω=50 rad/s常规PI输出转速和转矩


图9 DITC系统下,ω=50 rad/s SMC输出转速和转矩
由图8、图9可以看出,常规PI控制器参数固定,无法在较宽的调速范围内保持优良的控制性能。而常规PI的SRM DITC系统,给定角速度50 rad/s时转速略有波动,但转矩波动较大。SMC是一种智能控制算法,适应性强。从图10可以看出,转速调节器采用SMC的SRM DITC系统给定角速度50 rad/s时,转速波动小、超调小,同时转矩脉动仍然较小。
当ω=40 rad/s时,在电机运行稳定时加上一个负载扰动,图10为SMC控制器加了扰动后输出转速与转矩变化情况。可以看出,其转速在加入负载扰动瞬间,变化平缓,而且电机能够再次稳定运行转速恢复到40 rad/s,说明SMC的抗负载扰动能力强。


图10 ω=40 rad/s加入干扰SMC输出转速和转矩
4 结 语
本文在SRM转矩控制中采用DITC控制方法,同时在转速外环引入滑模控制器取代常规PI控制器,仿真表明,和常规PI比较,速度调节器采用滑模控制器的SRM DITC系统在较高速度时具有较好的动、静态性能及抗负载能力。
[1] 王宏华.开关磁阻电动机调速控制技术[M].北京:机械工业出版社,2014.
[2] NARLA S,SOZER Y,HUSAIN I.Switched reluctance generator controls for optimal power generation and battery charging[J].IEEE Transactions on Industry Applications,2012,48(5):1452-1459.
[3] ZHOU Suying,LIN Hui.Modeling and simuimion of switched reluctance motor double closed loop control system[C]//proeeding of the 6th World Congresson Intelligent Control and Automation,June 21.Dalian,2006:6151-6155.
[4] 吴红星.开关磁阻电机系统理论与控制技术[M].北京:中国电力出版社,2010.
[5] Robert B. Inderka,Rik W. De Doncker.Direct instantaneous torque control of switched reluctance drives[C]//IEEE 37th IAS Annual meeting,USA,2002:1605-1609.
[6] LIN Zhengyu,REAY D S,BARRY W.Ripple Reduction in switched reluctance motor drives using B-spline neural networks[J].IEEE Industry Applications Society,200,42(6):1445-1453.
[7] 茅靖峰,吴爱华,吴国庆,等.基于扩张状态观测的永磁直驱风力发电系统MPPT自适应滑模控制[J].电力系统保护与控制,2014,42(18):58-64.
[8] 李墨翰,李玉忍.基于滑模变结构的开关磁阻电机控制仿真[J].计算机仿真,2009,26(12):351-354.
[9] LI Yan,TANG Yi,CHANG Jibin et al.Continuous sliding mode control and simulation of SRM[C]//IEEE International conference on Cognitive Informatics & Cognitive Computing,2011:314-317.
[10] 邓君,詹琼华,孙剑波.开关磁阻电机滑模变结构速度控制[J].微电机,2006,39(7):1-4.
