3GY-1920型宽幅水田中耕除草机的设计与试验
2017-05-25赵柳霖崔宏伟郑文汉芦玉龙
齐 龙,赵柳霖,马 旭※,崔宏伟,郑文汉,芦玉龙
3GY-1920型宽幅水田中耕除草机的设计与试验
齐 龙1,2,赵柳霖1,马 旭1,2※,崔宏伟1,郑文汉1,芦玉龙1
(1. 华南农业大学工程学院,广州 510642;2. 华南农业大学南方农业机械与装备关键技术教育部重点实验室,广州 510642)
为了提高机械除草的作业效率、降低地头频繁调头引起的伤苗率,该文研制了3GY-1920型宽幅水田中耕除草机。该机由12 kW水田拖拉机提供动力,工作幅宽为5.7 m,一次作业可覆盖6行插秧机3个行程的作业宽度,并配备了4个双作用液压缸,控制整个机架的展开闭合与除草轮位置的横向调节。该文结合水田土壤特性和现有除草部件的特点,通过对除草轮的运动学与显式动力学仿真分析,设计并优化了螺旋刀齿式样除草轮,该除草轮通过与土壤及杂草的剪切、翻耕作用实现中耕除草作业。田间除草试验结果表明:在机具不同前进速度(0.3、0.6、0.9 m/s)和除草轮入土深度(3、6、9 cm)条件下,该机平均除草率为82%,伤苗率为4.8%;根据机具作业速度和幅宽可知该机作业效率为0.6~1.8 hm²/h;整机工作性能和作业效率满足水稻田机械中耕除草作业的技术要求。机械除草与化学除草产量对比试验结果表明:在试验区域内,机械除草产量高于化学除草,该研究可为中耕除草对水稻田产量的影响提供参考。
农业机械;试验;设计;水稻;机械除草;宽幅除草机;螺旋刀齿
0 引 言
稻田杂草是影响水稻产量的主要因素之一[1-2]。据报道,每年由草害引起的水稻损失率约为15%左右[3]。因此,有效地防控稻田杂草对提高水稻产量具有重要意义。
稻田除草一般以化学药剂除草为主,然而大量、高频率的施药会造成杂草抗药性、作物药害、环境污染等问题[4-5]。近年来,随着有机稻生产规模的扩大,亟需一种有效的物理除草方式控制稻田杂草[6-7]。机械除草是一种无化学污染、环境友好型的除草方式,在机械除草过程中,机械除草部件不仅能够有效除去杂草,还能对水田土壤进行疏松,从而增加土壤的氧气含量,促进作物的生长[8-9]。
欧美等国家水稻种植多采用飞机撒播技术,稻苗无序生长,植保机具难以下田,田间杂草防治多以化学防治为主,但其先进的旱地作物机械除草技术的研究值得借鉴[10-12]。亚洲国家的水稻种植方式通常以机械移栽为主,秧苗有序生长,可采用机械除草方式防控杂草。现有的水田除草机具按行走方式主要分为步进式和乘坐式2种。步进式除草机主要有日本和同产业MSJ型[13]以及美善SMW[14]等机型,国内有王金武等[15]研制的有机水稻中耕除草机、齐龙等[16]研制的步进式水田中耕除草机等。步进式除草机一般每次可作业2~3行,较为轻简,有些机型工作时在地头可提起换行避免压苗[17],但其工作效率较低、劳动强度大。乘坐式除草机通常每次作业7行左右,工作效率相对较高。主要有日本洋马SJVP系列[18],三菱农机LVW-8型[19],和实产业RW50型[20]等机型,国内则主要有南京农业机械化研究所研制的2BYS-6型水田中耕除草机[21]。在中国水稻生产中插秧机通常会在地头横插一排秧苗[22],受幅宽限制现有的乘坐式除草机工作时需在地头频繁转弯换向,不仅会影响工作效率,而且压苗较多造成产量损失。
为了提高机械除草作业效率、降低地头频繁调头引起的伤苗率,本研究结合水稻生产实际设计了3GY-1920型宽幅水田中耕除草机,该机配置19个除草轮,每工作一次幅宽可覆盖插秧机3组平行作业(每组6行),以期降低劳动强度、提高劳动生产率,减少换向次数,进而降低伤苗率。
1 整机结构设计
1.1 整机结构和工作原理
本文研制的3GY-1920型宽幅水田中耕除草机结构如图1所示,主要由水田拖拉机(插秧机底盘)、组合宽幅可调支架(包括左、右翼架、连接架、中架)、液压调节系统(包括电磁换向阀、油路块、液压缸、油管)、平衡仿形机构(包括开体花篮螺丝、平衡张紧弹簧、除草轮仿形机构)和螺旋刀齿除草轮等组成。
1)动力部分:除草机动力由水田拖拉机(井关PZ60-HGR,日本)提供,功率约为12 kW(额定功率)。2)控制部分:本机通过控制电磁阀的开闭控制液压缸伸缩,控制方式有手动与机器视觉控制2种。3)机架部分:整机机架主要由横截面长×宽×厚40 mm×40 mm×3 mm矩形管焊接而成,与插秧机底盘后悬挂系统为轴承套接,使机架整体具有绕连接轴的转动自由度,同时安装了相应的限位装置、弹簧拉紧装置等,可保证机具在运输中与田间工作时保持平衡状态,并且具有一定的仿形能力,避免工作时因左右地势起伏不同造成机架壅土。
工作前根据秧苗生长高度调节除草轮的安装高度,防止机架压苗;调节液压升降系统使机具满足不同田块除草深度的要求。工作时,机具以一定的速度前进,视觉相机实时采集作物行信息,控制系统根据作物行信息驱动电磁阀闭合,控制左右翼架的横向调节液压缸的伸缩来控制内滑梁的运动,实现左右两翼除草轮对行;螺旋刀齿除草轮受仿形弹簧拉力、泥土阻力以及机具向前的牵引力,随拖拉机地轮在行间作被动旋转。在旋转过程中,螺旋刀齿首先向下入土,对杂草形成剪切与埋压并搅动刀齿附近土壤,随后出土,带动杂草根部与泥土翻转,对杂草和泥土形成剪切、翻耕、埋压等作用,完成中耕除草作业。
1.2 液压调节系统设计
本研究以水田拖拉机系统为基础,设计了整机液压控制系统,包括油箱、过滤器、油泵、溢流阀、电磁换向阀、液压缸、节流阀等部件。其液压原理图如图2所示。

1. 溢流阀 2. 过滤器 3. 液压泵 4. 二位四通电磁阀 5. 手动换向阀 6. 节流阀 7. 三位四通电磁阀 8. 双作用液压缸
工作时发动水田拖拉机,液压油经过滤器过滤后进入油泵,经油泵加压后进入二位四通电磁换向阀(DSG- 02-2B2-DC12V-DL,saintfon,中国),机手控制其切换到水田拖拉机自身油路,调控手动换向阀控制后悬挂系统升降,使机具处于合适的作业高度;然后切换回油缸控制回路,人为或自动避苗控制系统PLC(programmable logic controller)控制端分别通过2个三位四通电磁阀(DSG-02-3C2-DC12V-DL,saintfon,中国),控制液压缸活塞杆的运动,带动两翼架上除草轮横向移动。机具在田间行走的同时,根据左右2组苗带偏移的信息,实时调控除草部件避开秧苗。同时安装溢流阀与节流阀控制整机工作油压与油缸活塞杆的行驶速度。
2 关键部件设计
2.1 宽幅机架设计
为提高工作效率,减少地头转弯对秧苗的碾压次数,设计3GY-1920型宽幅水田中耕除草机,与乘坐式高速水田插秧机进行配套作业。插秧机每次工作插6行秧苗,行距为0.3 m;本研究设计整机配置19个除草轮,除草轮之间距离为0.3 m,机架长度为5.7 m。由于插秧机3次作业行驶轨迹有所不同,为使除草机可一次对插秧机3次作业的秧苗进行中耕除草,将机架分为中架,左、右翼架3部分;中架安装7个除草轮,长2.1 m,两翼架分别安装6个除草轮,长1.8 m。工作时中架随水田拖拉机行驶在插秧机的轨迹上,两翼架分别行驶在相邻组间的轨迹上,可随轨迹线的变化实时调整除草轮的位置,宽幅机架除草轮轨迹示意图如图3所示。水田拉机后悬挂系统最低点距地面约0.45 m,水田土壤软硬有所不同,拖拉机工作时平均下陷约0.35 m,为方便除草机运输与作业,设计机架整体高度为0.5 m。
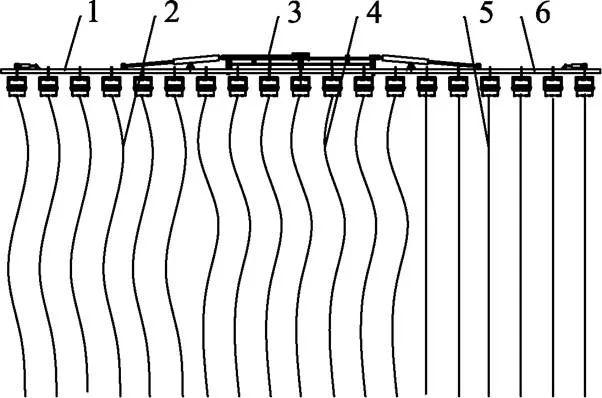
1. 左翼架 2. 左翼架苗带轨迹 3. 中架4. 中架苗带轨迹5. 右翼架苗带轨迹 6. 右翼架
为方便运输,用液压缸连接中架与翼架,通过液压缸活塞杆的伸、缩使翼架可绕中架展开、闭合切换工作、运输状态。同时机具在田间作业时,翼架由于力臂较长,除草轮在受到泥土阻力作用后会对翼架与中架的套筒连接点形成较大的力矩。为保护套筒连接点,同时减小液压缸功耗,需在液压缸规格允许范围内,增大安装点与套筒连接点的距离。水田拖拉机的工作油压为9 MPa,根据国家标准GB/T15622-1995,其适用油缸内径选择 40 mm,活塞杆直径选择20 mm。该型号油缸以行程400、300 mm应用较为广泛,本文选择行程为400 mm的MOBRD- 40´20´400LB-Y型液压缸,将安装点选在翼架上距套筒连接点0.6 m处。此时液压缸行程可满足翼架绕中架展开、闭合的需要,同时一定程度上平衡除草轮阻力带来的力矩。宽幅机架如图4所示。
宽幅喷雾机机架的稳定性对其喷雾质量影响较大,需特殊设计[23],本文研制的宽幅水田中耕除草机的悬挂部件在工作时接触土壤,同时配备了平衡仿形机构(机架与后悬挂系统采用轴承套接并配备开体花篮螺丝与平衡张紧弹簧)与除草轮单体仿形机构,整机可时刻保持平稳状态,故不再对机架的稳定性进行特殊设计。
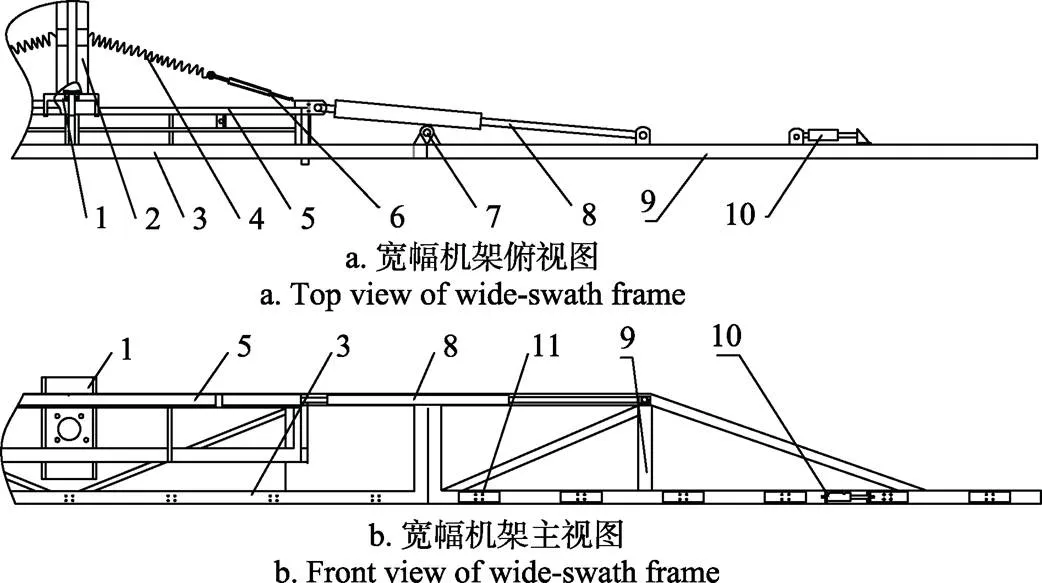
1. 轴承座 2. 悬挂机构 3. 中架 4. 平衡张紧弹簧 5. 连接架 6. 开体花篮螺丝 7. 套筒 8. 折叠调节液压缸 9. 右翼架 10. 横向调节液压缸 11. 除草轮安装孔
2.2 横向调节机架设计
由于本研究设计的中耕除草机每工作1次可处理插秧机3组作业,为防止组间秧苗位置的变化造成除草轮伤苗,在两翼架上设计横向调节装置,在工作过程中实时调整除草轮位置。调控方式可采用手动或机器视觉判断等方式。机器视觉调节是由机载图像采集系统获取机具前进方向的目标行稻株图像;对图像进行二值化处理然后对目标稻株进行边缘检测得到边缘离散点;将离散点拟合成边缘[24-25],以拟合边缘的中线作为视觉系统定位稻株行信息,以此信息来控制横向调节装置,使两翼架除草轮对行,从而实现除草轮的自动对行功能。
每个除草轮宽200 mm,秧苗行间距为300 mm,因此除草轮在行间实际可调节距离不大于100 mm。选用 横截面长×宽×厚30 mm×30 mm×3 mm、长度为1 800 mm的方管插入翼架下支撑梁内作为滑动梁,在翼架下支梁壁面上每间隔180 mm开长×宽120 mm×40 mm的矩形槽用于除草轮安装与滑动,横向调节液压缸两端分别连接下支撑梁与滑动梁,调控液压缸的伸缩控制滑动梁横向滑移从而实现除草轮的横向位置调节,如图5所示。
为使滑动梁可在支撑梁中正常滑动需选取符合要求的液压缸。查得钢-钢静摩擦因数为0.15,除草轮及滑动杆的质量为21.3 kg,水田拖拉机工作油压为9 MPa;通过推拉力计传感器(SH-10K,SUNDOO,中国)测得在水田土壤中推动单个除草轮横向移动所用的力约为100 N,该机翼架配备6个除草轮,为使滑动梁可正常滑动,液压缸提供载荷需满足
(2)
有杆腔进油时计算液压缸内径为
式中F为滑动梁与支撑梁之间的最大静摩擦力,N;1为进油压力,Pa ,2为回油压力,Pa;为活塞杆直径,m。
选取回油背压2=0时,由式(3)得出满足要求的液压缸应大于1.3 cm。结合液压缸国家标准(GB/ T15622-1995)选取液压缸内径为2.4 cm,外径为3.2 cm,活塞杆直径为1.6 cm(工作压力>7 MPa,选择为0.7)。除草轮调节范围一般不超过100 mm(行距300 mm,轮宽 200 mm),故选取行程为100 mm的小型双作用液压缸,其型号为MOBRD-32×16×100 LB-Y。
2.3 除草轮的设计与仿真分析
2.3.1 除草轮设计
除草部件是除草机的关键部分,为实现小功率拖拉机宽幅除草作业,要求除草轮工作阻力小,对土壤扰动能力强。根据水田土壤的力学特性分析可知[26],水田土壤抗剪切能力较弱,剪切加载可在较短的行程将土壤破坏。故本研究设计除草轮齿为螺旋刀齿,在充分利用刀齿阻力小、易于剪切扰动土壤的基础上,增加了与土壤的作用面积,增大土壤的受扰动范围。选用矩形锰钢片作为刀齿材料,将齿缘磨刃以增加剪切能力,并绕轴向旋转720°以增加与土壤的有效作用面积,焊接嵌入到轮盘中。
粉条的感官评定参照Wei[12]等人的方法,略作修改。评分小组由 20名感官评价员组成,其中男性 8名,女性12名,年龄为22~30岁,感官评价员在评定前经过市售粉条感官评定的培训,对感官评定方法有一定的认识。根据色泽、适口性、弹韧性、粘性和风味来评估粉条的消费者可接受性,具体评价标准见表1。
在插秧后15 d的除草期内杂草高度一般不超过 250 mm,而当除草轮直径较小时会出现除草轮整体缠草的现象,因此要求
2π≥(4)
式中为除草轮半径,mm;为杂草高度,mm;
故设计除草轮轮盘直径为200 mm。选用200 mm× 3 mm的圆形锰钢片,将边缘磨刃作为轮盘;机插秧秧苗行间距为300 mm,插秧后15 d秧苗根系成株直径一般不超过30 mm,为避免除草轮伤苗,设计其宽度为200 mm(为使除草轮在接行行间也可正常工作,同时设计了宽度为140 mm的除草轮);除草轮的作用对象为水田杂草与水、土混合物,对其磨损和腐蚀比较严重,故除草 轮的材料应为抗氧化性、耐腐蚀性和耐磨性较强的 20 CrMnTi号钢。同时为避免工作时轮盘上刀齿之间的间隙造成漏除,要求除草轮配备多个刀齿以减小间隙,但齿数过多会造成除草轮重量过大、阻力过大、入土能力下降等问题。同时由于水田土壤存在一定的流动性,为防止除草轮被机架重力压入土壤而入土过深,轮盘设计直径与刀齿相当,起一定的限深作用。参考现有的除草轮尺寸与结构[27],设计刀齿数目为6,其结构如图6所示。
1. 轮盘 2. 螺旋刀齿 3. 销轴孔
对于齿宽的设计则需对螺旋刀齿除草轮的阻力、除草能力、入土能力等进行综合分析,并结合其运动轨迹与动力学仿真分析结果进行优化。
2.3.2 除草轮运动轨迹分析
一个圆在一条定直线上滚动时,圆周上一个定点的运动轨迹为旋轮线。分析螺旋刀齿除草轮的运动轨迹可选取轮盘上相邻的2个刀齿安装孔,作为安装孔分布圆圆周上的2个定点。则除草轮在田间工作时,它们的运动轨迹可近似为2条相邻的旋轮线,如图7所示。
注:y1为过原点的刀齿安装孔的旋轮线;y2为与之相邻的刀齿安装孔的旋轮线;v为除草轮前进方向;h为除草轮入土深度,mm;L为y1和y2 2相邻旋轮线在除草轮为同一入土深度h时的水平距离,等于旋轮线对应的刀齿安装孔在除草轮圆弧上的圆弧距离,mm;S1表示单个刀齿先后与土壤表面2次作用(入土、出土)作用点之间的间距,mm;S2表示两条相邻的刀齿先后与土壤表面作用点(出土、入土)作用点之间的间距,mm。
其中经过原点的曲线1的参数方程[28]为
式中为除草轮半径,mm;为除草轮转过的弧度,rad;
当除草轮入土深度为,即1=时(为任意值),代入式(5)中,可得到1与有以下关系
(7)
分析其运动轨迹,随着入土深度变化,当1>>2或1<<2,即两间距尺寸相差较大时,需安装大宽度的刀齿覆盖土壤线间距区域以避免漏除,然而大宽度的刀齿会造成除草轮入土困难以及重复作业;当1与2接近或相等时,合理宽度的刀齿可完全覆盖刀齿、刀齿之间与土壤表面作用时固有的间隙从而避免漏除,即刀齿宽度=1=2=/2≈52 mm。由于刀齿宽度综合影响着除草轮的入土能力、除草效果、工作阻力等,因此采用有限元分析法对刀齿宽度进行进一步对比优化。
由式(6)求得此时理论不漏除入土深度≈62.6 mm。可为后续田间试验除草轮入土深度的水平选择提供参考。
2.3.3 除草轮的有限元法分析
水田杂草生长环境较为复杂,目前在仿真分析上缺少必要的理论模型[29],难以就杂草、泥土、除草轮进行综合分析。因此本节通过探究除草轮与水田土壤的作用过程,来间接反应除草轮的作业性能。
在2.3.2节分析得知理论不漏除的刀齿理论宽度约为52 mm,为了进一步优化刀齿宽度,本研究分别建立了不同齿宽(20、30、40、50、60 mm)的除草轮模型,由于宽度大于52mm的刀齿即可完全避免理论上的漏除,因此无需在仿真中继续增大刀齿宽度(60mm)来验证理论计算结果,因此根据水田土壤存在一定流动性的特点,设计宽度较小的刀齿来进行仿真计算,以期得到较优参数。采用显式动力学软件ANSYS/LSDYNA对其作业过程进行仿真分析。除草轮在工作过程中的阻力大小反映了其入土能力与整机的功耗,而对土壤破坏能力的大小则反映了其除草率的高低[17]。因此仿真结果以除草轮的阻力、土壤单元变形比例(土壤单元变形比例与土壤扰动率正相关[30])作为评价除草轮性能的指标。
水田机械除草前一般会对田块进行泡水处理,对泥浆层进行软化增强除草机作业效果。因此除草部件的仿真作用对象应为水与土壤的耦合物质,故在仿真时运用多物质耦合算法建立长方形实体作为水田土壤-水的复合模型,尺寸长´宽´高为1 000 mm´400 mm´150 mm;通过定义无反射边界BOUNDARY_NON_REFLECTING模拟处于大田环境中的小块区域;其网格单元采用任意拉格朗日-欧拉算法(ALE, arbitrary lagrangian-eulerian);水层与土壤层材料分别选用9号(MAT_NULL)与147号(MAT_FHWA_SOIL)材料。除草轮网格采用拉格朗日算法,材料为20号(MAT_RIGID)刚体材料。
仿真过程采用机械与土壤-水作用的流固耦合算法,设定流固耦合关键字CONSTRAINED_LAGRANGE_ IN_SOLID,定义拉格朗日单元体(除草部件)为SLAVE,定义ALE单元体(土壤-水模型)为MASTER,采用惩罚函数方法进行流固耦合仿真;定义除草轮运动关键字BOUNDARY_PRESCRIBED_MOTION_RIGID使除草轮以一定的转速匀速通过仿真区域;同时设定求解控制关键字CONTROL_TEMINATIONCONTROL_TIMESTEP以及数据输出关键字DATABASE_FSI实现数据定时输出。
仿真结果如图8所示,各除草轮在竖直方向对土壤-水模型的压应力随着齿宽的增加而增大。
图8 不同刀齿宽度除草轮作业过程仿真
除草轮的工作阻力在水平方向上表现为阻碍除草轮前进,在竖直方向上表现为阻碍除草轮入土,因此导出仿真模型中2个方向的力,形成合力进行对比分析。建立除草轮阻力-时间曲线图。
同时选取除草轮在土壤-水复合模型上作用的区域作为统计区域,导出该区域内单元变形所占比例。可得到5种不同齿宽除草轮与土壤-水复合模型作用时,复合模型的累计变形单元比例-时间曲线图,如图9。
由图9可知,螺旋刀齿除草轮由空转到入土,经过约400 ms后进入稳定工作状态。4种除草轮在稳定工作状态受到的阻力平均值分别为20 mm=13.8 N,30 mm= 16.8 N,40 mm=17.9 N,50 mm=20.1 N,60 mm=22.6 N,除草轮作业时阻力随着刀齿宽度增加而增大;刀齿宽度为20 mm的除草轮由于刀齿宽度过小,难以有效扰动水田土壤;在刀齿宽度为30、40、50、60 mm的除草轮作用下,土壤单元变形比例较大;除草轮对土壤的扰动能力随齿宽增加而增加,但当刀齿宽度超过30 mm时,差异不显著。
综上,虽然理论不漏除的刀齿宽度为52 mm,但经过对不同齿宽的除草轮与水田土壤的仿真分析可知:由于水田土壤的流动性,除草轮在与水田土壤作用的过程中,除了除草轮作用的水田土壤的理论区域外,刀齿可同时带动作用区域外的土壤产生变形,刀齿宽度为30、40、50、60 mm对土壤扰动能力相差不大(表现为土壤单元变形比例接近)。因此综合除草轮的阻力与对土壤的扰动能力,选择除草轮的刀齿宽度为30 mm,可在有效扰动土壤除去杂草的前提下,减小除草轮阻力,降低功耗。所优化的刀齿结构如图10所示。
2.4 除草轮单体仿形机构设计
田块各区域土壤的软硬程度有所不同。被动旋转的除草部件若被紧固在机架上,在相对较坚硬的土壤上可能会被折弯变形,而在相对较软的土壤会造成壅土。因此,螺旋刀齿除草轮需要具备一定仿形能力以适应不同的土壤环境,同时保持合适的作业深度。设计除草轮弹簧张紧仿形机构如图11所示。
上夹片上端通过螺栓与横向调节机架的内滑梁紧固,使除草轮与内滑梁保持运动同步;下端连接装配着除草轮的轮架,使除草轮具有绕销钉的转动自由度,并在销钉连接处增加限位装置,防止轮架翻转角度过大。轮架上端与上夹片通过张紧弹簧(根据不同地块的硬度选用不同弹性模量的弹簧)连接,可为除草轮提供向下的预紧力。当机具以一定的入土深度在田间工作时,在土壤较硬的区域,弹簧张紧,增加除草轮的入土能力;在土壤较软的区域,弹簧收缩,防止除草轮壅土。
3 田间试验与结果分析
3.1 试验条件与指标设定
2015年8月17日在广东省肇庆市鼎湖区坑口大旗山(肇庆市农业科学研究所试验田)进行了田间除草与产量对比试验。试验水稻品种为超级稻永丰优9 802,平均苗高20 cm,每穴苗数平均4株,杂草主要为稗草、千金子等,平均高度为8 cm。
除草试验选取试验指标为除草率C(%)、伤苗率I(%)。其中
(10)
式中为试验区域内水稻行间杂草总株数,为除草作业后试验区域内水稻行间剩余杂草总数,为除草作业后试验区域内被压折、连根拔起和倒伏的损伤秧苗数,为试验区域内的总秧苗数。
产量对比试验选择试验指标为测区产量均值、穴数、有效穗数等[31]。
3.2 试验设计
1)除草试验方法
选取9块20 m长的区域作为试验区域,每个试验区域前后各预留5 m长的区域作为加速和减速的缓冲区(不计入试验区域),以保证机器能以稳定的状态通过试验区域。在试验区域内随机选取2个两行´10 m的范围为2个测区,分别统计2测区内机具的除草率与伤苗率。
采用全因子试验法选取除草机前进速度和除草轮入土深度作为试验因素,对除草机的工作性能进行田间试验。前进速度选取了0.3、0.6和0.9 m/s 3个水平;除草轮入土深度选取了3、6和9 cm 3个水平。入土深度的选择依据如下:除草轮半径设计为100 mm,当其入土深度超过其半径时,泥土会阻塞销轴影响除草轮转动,因此试验时选择除草轮最大入土深度为90 mm;由2.3.2节理论计算的不漏除入土深度≈62.6 mm,由于水田土壤具有一定流动性,除草轮刀齿工作时会带动作用区域外的土壤,故选择中间入土深度为60 mm;在初步性能测试中发现,刀齿能稳定入土的最小试验入土深度为30 mm。
观察2因素不同水平的组合对除草机作业质量的影响。试验现场如图12所示。
2)产量对比试验
分别在机械除草(0.2 hm2)和化学除草(0.2 hm2)的田块内,沿对角线方向各随机选取5个长势良好的测产区域,共10测区,测区大小为3行×10穴的方形区域(约30穴)。每个测区分别测量面积,统计测区内稻穴数、有效穗数、产量。

图12 田间除草试验
3.3 结果及分析
1)除草试验结果分析
除草试验按因素不同水平的组合进行,2名记数员分别统计各自测区内杂草数和伤苗数,将测得的试验数据取平均值记录如表1。
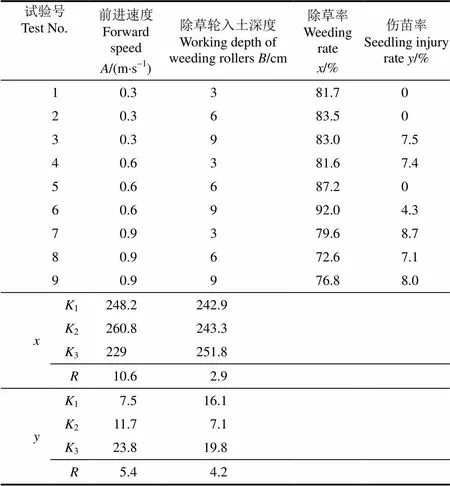
表1 整机性能田间试验数据
注:极差分析栏中各列分别对应、因素影响下各水平对应的总值和极 差值。
Note: Data in each range analysis column correspond to the total value and rang value which was affected by different level of factorand.
由表1极差分析结果可知,各因素影响除草率的主次顺序为机具前进速度>除草轮入土深度。随着机具前进速度增加除草率先上升后下降。因除草轮为从动旋转,转速与机具前进速度成正比,当前进速度较慢时螺旋刀齿翻动土壤能力较弱,除草率较低,机具前进速度增加,除草率随之持续上升,并在0.6 m/s达到最高;而速度过快会导致除草轮打滑、入土不充分,导致除草率下降。随着除草轮入土深度增加,除草轮与土壤作用面积增大,对杂草作用能力增强,故除草率持续上升,在9 cm深时达到最高。
各因素影响伤苗率的主次顺序为机具前进速度>除草轮入土深度。随着机具前进速度增加伤苗率持续上升,因为随着机具前进速度增大,使得自动对行控制响应相对滞后,进而引起除草轮对行不准确而导致伤苗。除草轮入土深度对伤苗率有一定影响,当入土深度较大时,由于耕作深度较深造成除草轮与秧苗根系的作用几率增大,伤苗率升高。
综合考虑不同因素下的除草率、伤苗率,并参照苗间除草机质量评价技术规范(DB23/T930-2005)中对除草机作业质量的技术要求(除草率≥80%,伤苗率≤5%)。可得出两组较优组合。分别为前进速度为0.6 m/s除草轮深度为6 cm,此时除草率为87.2%,伤苗率为0%;前进速度为0.6 m/s除草轮深度为9 cm,此时除草率为92.0%,伤苗率为4.3%。
在机具不同前进速度和除草轮入土深度下,该机平均除草率为82%,平均伤苗率为4.8%。同时根据机具作业速度范围和幅宽可测得该机作业效率为0.6~1.8 hm²/h,满足水稻田机械除草的作业质量与工作效率的要求。
2)机械除草与化学防控产量对比分析
机械除草、化学除草2种杂草控制方式田块测试所得产量相关数据如表2所示。
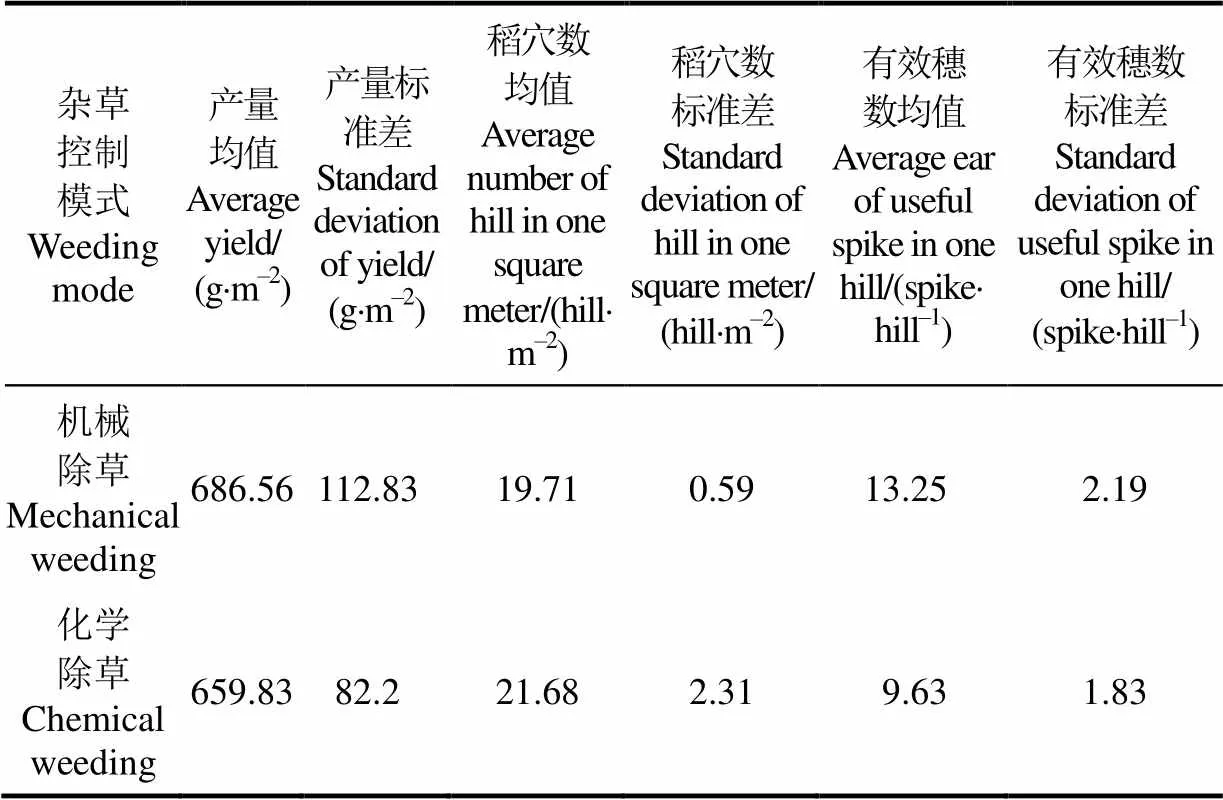
表2 产量对比试验结果
由表2可知,机械除草产量为(686.56±112.83) g/m2,化学除草产量为(659.83±82.2) g/m2;机械除草每平米的稻穴数为(19.71±0.59)穴,化学除草每平米的稻穴数为(21.68±2.31)穴;机械除草每穴有效穗数为(13.25±2.19)棵,化学除草(9.63±1.83)棵。机械除草的产量相对化学除草有所提高,化学除草的产量波动性更小。比较2种方式单位面积的稻穴数可知,该除草机在工作过程中有伤苗情况,每平方米约造成1.97株伤苗;比较2种方式每穴内的有效穗数可知,机械除草的有效穗数高于化学除草。
综上所述,在试验区域内,机械除草对稻苗有一定的损伤,减少了单位面积内秧苗的穴数,但其中耕作用可促进稻苗分蘖,增加了秧苗的有效穗数,进而提高水稻产量。该研究可为中耕除草对水稻田产量的影响提供参考。
4 结 论
1)研制了3GY-1920型宽幅水田中耕除草机,该机由水田拖拉机提供动力,采用4个双作用液压缸调节宽幅支架,实现整架展开闭合与除草轮位置的横向调节,通过螺旋刀齿除草轮与土壤及杂草作用进行除草;该机为被动式除草,无需动力传输结构,结构简单轻便;宽幅机架设计每次可除草19行,可与乘坐式插秧机进行配套作业,可减少频繁转向带来的机具压苗。作业效率为0.6~1.8 hm²/h。
2)本机设计了液压驱动的两翼架横向调节机构,解决了除草过程中因插秧轨迹不同而伤苗的问题;结合水田土壤力学特性与现有除草轮结构,设计了螺旋刀齿式除草轮,并对其进行了理论计算与仿真分析,得到了该除草部件的最佳参数;本机具配备机架平衡仿形结构与除草轮仿形结构,工作时具有较高稳定性,可有效适应不同的水田环境。
3)分别进行了整机性能试验与不同杂草控制方式田块的产量对比试验。试验结果表明:该机平均除草率为82%,伤苗率为4.8%;在试验区域内,机械除草作业的田块平均产量高于化学除草的田块,可为中耕除草对水稻田产量的影响提供参考。
[1] 刘珍环,李正国,唐鹏钦,等. 近30年中国水稻种植区域与产量时空变化分析[J]. 地理学报,2013,68(5):680-693. Liu Zhenhuan, Li Zhengguo, Tang Pengqin, et al. Spatial- temporal changes of rice area and production in China during 1980-2010[J]. Acta Geographica Sincia, 2013, 68(5): 680-693. (in Chinese with English abstract)
[2] 刘兴林,孙涛,付声姣,等. 水稻田除草剂的应用及杂草抗药性现状[J]. 西北农林科技大学学报:自然科学版,2015,43(7):115-126. Liu Xinglin, Sun Tao, Fu Shengjiao, et al. Herbicide application and weeds resistance in rice field in China[J]. Journal of Northwest A&F University: Natural Science Edition, 2015, 43(7): 115-126. (in Chinese with English abstract)
[3] 于改莲. 稻田除草剂的正确施用方法[J]. 农药,2001,12(40):43-45. Yu Gailian. Fit method of spraying herbicide in paddy field[J]. Agrochemicals, 2001, 12(40): 43-45. (in Chinese with English abstract)
[4] 张朝贤,倪汉文,魏守辉,等. 杂草抗药性研究进展[J]. 中国农业科学,2009,42(4):1274-1289. Zhang Chaoxian, Ni Hanwen, Wei Shouhui, et al. Current advances in research on herbicide resistance[J]. Scientia Agricultura Sinica, 2009, 42(4): 1274-1289. (in Chinese with English abstract)
[5] Rebich R A, Coupe R H, Turman E M. Herbicide concentrations in the Mississippi River Basin: The importance of chloroacetanilide herbicide degradates[J]. Science of the Total Environment, 2004, 321(1/3): 1-3.
[6] 董心普. 广西有机稻产业化发展研究[D]. 南宁:广西大学,2013. Dong Xinpu. Research on Development of Organic Rice Industry in Guanxi Province[D]. Nanning: Guangxi University, 2013. (in Chinese with English abstract)
[7] Bond W, Grundy A C. Non-chemical weed management in organic farming systems[J] Weed Research, 2001, 41(5): 383-405.
[8] 马旭,齐龙,梁柏,等. 水稻田间机械除草装备与技术研究现状及发展趋势[J]. 农业工程学报,2011,27(6):162-168. Ma Xu, Qi Long, Liang Bai, et al. Present status and prospects of mechanical weeding equipment and technology in paddy field[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2011, 27(6): 162-168. (in Chinese with English abstract)
[9] 陶桂香,王金武,周文琪,等. 水田株间除草机械除草机理研究与关键部件设计[J]. 农业机械报,2015,46(11):57-63. Tao Guixiang, Wang Jinwu, Zhou Wenqi, et al. Herbicidal mechanism and key components design for paddy weeding device[J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(11): 57-63. (in Chinese with English abstract)
[10] Tillett N D, Hague T, Grundy A C, et al. Mechanical within- row weed control for transplanted crops using computer vision[J]. Blosystems Engineering, 2008, 99(2): 171-178.
[11] Lee W S,Slaughter D C, Giles D K. Robotic weed control system for tomatoes[J]. Precision Agriculture, 1999, 1(1): 95-113.
[12] Griepentrog H W, Gulhom-Hansen T, Nielsen J. First field results from intra-row rotor weeding[C]//2006 CIGR World Congress Agricultural Engineering for a Better World, Bonn, Germany, 2006, 9: 325-327.
[13] 和同産業株式会社. 水田の草取り機:4057492[P]. 日本专利:2007-12-21.
[14] 株式会社美善. 水田除草兼用溝切り機:2007105006 [P]. 2007-04-26.
[15] 王金武,赵佳乐,王金峰,等. 有机水稻中耕除草机设计[J]. 东北农业大学学报,2013,44(11):107-112. Wang Jinwu, Zhao Jiale, Wang Jinfeng, et al. Design of organic rice cultivation weeding[J]. Journal of Northeast Agricultural University, 2013, 44(11): 107-112. (in Chinese with English abstract)
[16] 齐龙,马旭,谭祖庭,等. 步进式水田中耕除草机的研制与试验[J]. 农业工程学报,2012,28(14):31-35. Qi Long, Ma Xu, Tan Zuting, et al. Development and experiment of marching-type inter-cultivation weeder for paddy[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012, 28(14): 31-35. (in Chinese with English abstract)
[17] 齐龙,梁仲维,蒋郁,等. 轻型水田除草机的设计与试验[J]. 吉林大学学报:工学版,2016,46(3):1004-1012. Qi Long, Liang Zhongwei, Jang Yu, et al. Simulation and field test of the lightweight paddy weeder[J]. Journal of Jilin University: Engineering and Technology Edition,2016, 46(3): 1004–1012. (in Chinese with English abstract)
[18] 宮原佳彦. 機械除草技術開発の動向[J]. 東北雑草研究会,2007(7):1-6.
[19] 三菱農機株式会社,株式会社キュウホー. 除草機:2007105006[P]. 2007-04-26.
[20] みのる産業株式会社. 除草機:4038538[P]. 2007-11-16.
[21] 吴崇友,张敏,金诚谦,等. 2BYS-6型水田中耕除草机设计与试验[J]. 农业机械学报,2009,40(7):51-54. Wu Chongyou, Zhang Min, Jin Chengqian, et al. Design and experiment of 2BYS-6 type paddy weeding-cultivating machine[J]. Transaction of the Chinese Society for Agricultural Machinery, 2009, 40(7): 51-54. (in Chinese with English abstract)
[22] 梁仲维,齐龙,马旭,等. QSC-2型步进式水稻除草机的设计与试验[J]. 农机化研究,2015(8):115-119. Liang Zhongwei, Qi Long, Ma Xu, et al. Design and test of QSC-2 marching type paddy weeder[J]. Journal of Agricultural Mechanization Research, 2015(8): 115-119. (in Chinese with English abstract)
[23] 吴吉麟,苗玉彬. 不同激励源下宽幅喷雾机喷杆的动态特性分析[J]. 农业工程学报,2012,28(4):39-44. Wu Jilin, Miao Yubin. Dynamic characteristic analysis of boom for wide sprayer with different exciting sources[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012, 28(4): 39-44. (in Chinese with English abstract)
[24] 高国琴,李明. 基于K-means算法的温室移动机器人导航路径识别[J]. 农业工程学报,2014,30(7):25-33. Gao Guoqin, Li Ming. Navigating path recognition for greenhouse mobile robot based on K-means algorithm[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2014, 30(7): 25-33. (in Chinese with English abstract)
[25] 吴露露,马旭,齐龙,等. 改进Hough变换的农作物病斑目标检测方法[J]. 农业工程学报,2014,30(10):152-159. Wu Lulu, Ma Xu, Qi Long, et al. A method of target detection for crop disease spots by improved Hough transform[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2014, 30(10): 152-159. (in Chinese with English abstract)
[26] 梁仲维. 轻简式步进水田除草机的研制[D]. 广州:华南农业大学,2016. Liang Zhongwei. The Development of Lightweight Marching- type Inter-cultivating Weeder for Paddy[D]. Guangzhou: South China Agricultural University, 2016. (in Chinese with English abstract)
[27] 赵佳乐. 水田中耕除草机的设计与试验研究[D]. 哈尔滨:东北农业大学,2012. Zhao Jiale. Design and Experiment on Weeding-cultivating Mechine for Paddy Field[D]. Harbin: Northeast Agricultural University, 2012. (in Chinese with English abstract)
[28] 刘世伟,伍家德. 旋轮线的特征性质[J]. 华中师院学报:自然科学版,1981(2):119-122.
[29] 刘永军. 田间水稻秧苗和稗草力学特性研究[D]. 哈尔滨:东北农业大学,2014. Liu Yongjun. Study on Mechanical Properties of Rice Seedlings and Barnyard Grasses in the Field[D]. Harbin: Northeast Agricultural University, 2014. (in Chinese with English abstract)
[30] 齐龙,梁仲维,马旭,等. 耙压式除草轮与水田土壤作用的流固耦合仿真分析及验证[J]. 农业工程学报,2015,31(5):29-37. Qi Long, Liang Zhongwei, Ma Xu, et al. Validation and analysis of fluid-structure interaction between rotary harrow weeding roll and paddy soil[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(5): 29-37. (in Chinese with English abstract)
[31] 李泽华,马旭,齐龙,等. 华南双季稻区水稻不同机械化栽植方式对比试验与评价[J]. 农业工程学报,2015,31(3):40-47. Li Zehua, Ma Xu, Qi Long, et al. Comparison and evaluation of different rice mechanized transplanting methods in double cropping area of South China[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(3): 40-47. (in Chinese with English abstract)
Design and test of 3GY-1920 wide-swath type weeding-cultivating machine for paddy
Qi Long1,2, Zhao Liulin1, Ma Xu1,2※, Cui Hongwei1, Zheng Wenhan1, Lu Yulong1
(1.510642,; 2.(),510642,)
In order to improve the mechanical weeding efficiency and reduce the injury rate of seedling caused by frequent swerve at the end of the field, a wide-swath machine, named 3GY-1920type wide-swath weeder, was designed for intertillage and weeding in paddy field. This weeding machine driven by the paddy tractor mounted relevant components including the wide-swath adjustable frame, the hydraulic control system, the weeding unit and profiling mechanisms. To match triple working widths of ride stylehigh-speed rice transplanter, this weeder was equipped with 19 weeding rolls. The working width was designed to be 5.4 m according to line spacing of rice seeding, which was normally 0.3 m. As the transplanter could not follow one path line in 3 different processes, the whole frame was divided into 3 parts including the left-side frame, the right-side frame and the bearing frame. A hydraulic system, including oil pump, different types of electromagnetic valves, hand valve, 4 hydraulic cylinders, relief valve, throttle valves and so on, were equipped to control the 4 single-rod double-acting hydraulic cylinders, which could adjust the frames to fold or unfold for transportation or weeding, and the real-time motion of rolls on the side frames. The weeding roll was designed as the spiral cutter weeding roll referring to the existing rollers and the bearing capacity and shearing strength of paddy. And the different parameters for weeding rolls such as the working resistance and the capacity to damage soil were tested with the explicit finite element software ANSYS/LSDYNA. The weeding roll was composed of 6 cutters; every cutter was sharpened and rotated around the axis by 720° and welded into the reel. A spring type profiling mechanism was also designed and applied to ensure the stable working depth. The installation height and working depth of weeding machine were adjusted before weeding so as to avoid injuring the plants due to the difference of the size of the rice seedlings. When the weeding machine moved forward at a certain speed, the weeding rolls were rotated by the force of soil resistance, elastic force of spring, and forward stress of traction. And the spiral cutters on the roll moved downward into and out of the soil for shearing weeds and stirring soils to cover weeds at the same time. An all-factor experiment on the weeding rate and injury rate of seedlings was conducted to test the performance of this weeding machine. Depth of the weeding and travel speed were selected as 2 factors in this experiment. Results showed that the operating efficiency of this weeding machine was 0.6-1.8 hm²/h, the average weeding rate was 82%, and the average seedling injury rate was 4.8%. With the increment of travel velocity, the weeding rate rose and then fell, and the injury rate kept rising. With the increase of working depth, the weeding rate continued to rise, and the seedling injury rate went up at first and then declined. The weeder showed the optimal operation effect when the weeder’s speed was 0.6 m/s, and the roll’s working depth was maintained at 6 cm. Under the parameter combination, the average weeding rate was 87.2% and no seedlings were damaged. A yield test was also performed to compare the differences between 2 weeding methods (mechanical weeding and chemical weeding). Results were as follows: The average yield of rice under mechanical weeding was 686.56 g/m2while that under chemical weeding was 659.83 g/m2. The average number of useful spikes per hole in the testing zone was 13.25 under the condition of mechanical weeding and 9.36 using chemical method of weed control. The average number of holes per square meter was 19.71 and 21.68 based on mechanical and chemical weeding respectively. The result suggests that the mechanical weeding may hurt the seedlings compared to chemical weeding method, however, its weeding and inter-cultivation function can promote the tilling of plants and improve the yield of rice.
agricultural machinery; experiments; design; rice; mechanical weeding; wide-swath type weeder;spiral cutter
10.11975/j.issn.1002-6819.2017.08.006
S224.1
A
1002-6819(2017)-08-0047-09
2016-07-09
2017-04-09
国家自然科学基金(51575195);广东省自然科学基金(2015A030313402);广东省科技计划项目(2014B020207003);现代农业产业技术体系建设专项资金资助( CASRS-01-33);广州市珠江科技新星专项(2014J2200041)
齐 龙,男,汉族,黑龙江哈尔滨人,博士,研究员,主要从事现代农业智能装备与精准农业方面的研究。广州 华南农业大学工程学院,510642。Email:qilong@scau.edu.cn
马 旭,男,汉族,辽宁沈阳人,教授,博士生导师,主要从事现代农业智能装备与精准农业方面的研究。广州 华南农业大学工程学院,510642。Email:maxu1959@scau.edu.cn
齐 龙,赵柳霖,马 旭,崔宏伟,郑文汉,芦玉龙. 3GY-1920型宽幅水田中耕除草机的设计与试验[J]. 农业工程学报,2017,33(8):47-55. doi:10.11975/j.issn.1002-6819.2017.08.006 http://www.tcsae.org
Qi Long, Zhao Liulin, Ma Xu, Cui Hongwei, Zheng Wenhan, Lu Yulong.Design and test of 3GY-1920 wide-swath type weeding-cultivating machine for paddy[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(8): 47-55. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2017.08.006 http://www.tcsae.org