引入功率微分项的并网下垂控制逆变器小信号建模与分析
2017-05-24张昌华
陈 昕,张昌华,黄 琦
(电子科技大学 能源科学与工程学院,四川 成都 611731)
0 引言
目前,分布式发电和分布式储能技术受到了越来越多的关注[1-4]。三相并网逆变器作为分布式电源并网的主要接口,其控制策略及稳定性也成为研究焦点[5-7]。
基于模拟同步发电机下垂特性的下垂控制策略可实现多逆变器无互连线并联控制,可根据母线电压与频率控制并网逆变器输出有功、无功功率。在此基础上,学者们提出了经典的下垂控制[8-9]方法以及多种改进的下垂控制方法,如自适应调节下垂系数控制[10]、相角下垂控制[11]、鲁棒下垂控制[12]、类功率下垂控制[13]等。这些控制策略具有各自的优点,但其控制效果与稳定性受制于下垂系数的选取,因此,确定科学的下垂系数选取方法是研究的关键。小信号稳定性分析作为成熟的分析工具[14-15]在传统电力系统稳定性分析中已有成熟的运用。由逆变器组成的系统与传统电力系统有所不同,由于其系统惯量小,更易发生振荡失稳,更有必要进行小信号稳定性分析以及采取相应的改善措施。
本文建立了基于经典的下垂控制以及本文所提出的加入功率微分项的下垂控制的并网逆变器的完整小信号模型。通过小信号稳定性分析,分析了下垂系数以及功率微分系数对系统受扰后动态性能和稳定性的影响,为并网逆变器的动静态性能分析与参数选取提供了理论依据。
1 逆变器并网模型
逆变器并网电路及控制器如图1所示。图中,控制器由含下垂控制的功率环、电压外环和电流内环组成;输出采用LCL滤波器,Lf、Lc和Cf分别为滤波器电感和电容,通过传输线Zline并入无穷大电网ub;IGBT桥为三相全控整流桥;il为滤波器前级电感电流;io为逆变器输出电流;uo为逆变器输出电压;uo*为功率环输出电压参考,并作为电压环输入;il*为电压环输出电流参考,并作为电流环输入;为电流环输出控制信号,即PWM波信号。

图1 逆变器并网电路Fig.1 Circuitry of grid-connected inverter
2 逆变器并网小信号模型
2.1 功率环小信号子模型
本文采用的功率环结构如图2所示。
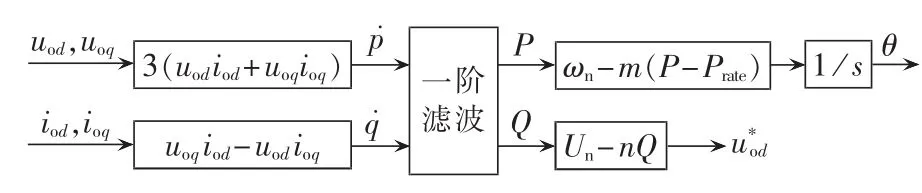
图2 功率控制器Fig.2 Power controller
逆变器输出电压uo、电流io通过dq变换得到功率控制器输入 uod、uoq、iod、ioq。dq 变换为等幅值变换,计算得到的有功功率为三相功率,无功功率为单相功率(使用三相功率亦可)。一阶滤波环节微分方程表示为:

其中,ωc为滤波器转折角频率。
由有功-频率下垂方程可得逆变器参考角频率及相角,表示如下:
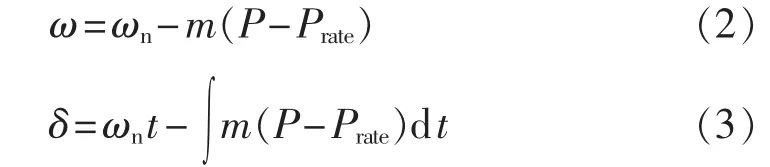
其中,Prate为给定的有功功率;ωn为系统额定角频率;ω为逆变器角频率;δ为逆变器相角;m为下垂系数。
由无功-电压下垂方程可得功率控制器提供的dq轴参考电压,表示如下:

其中,Un为额定电压;n为下垂系数。
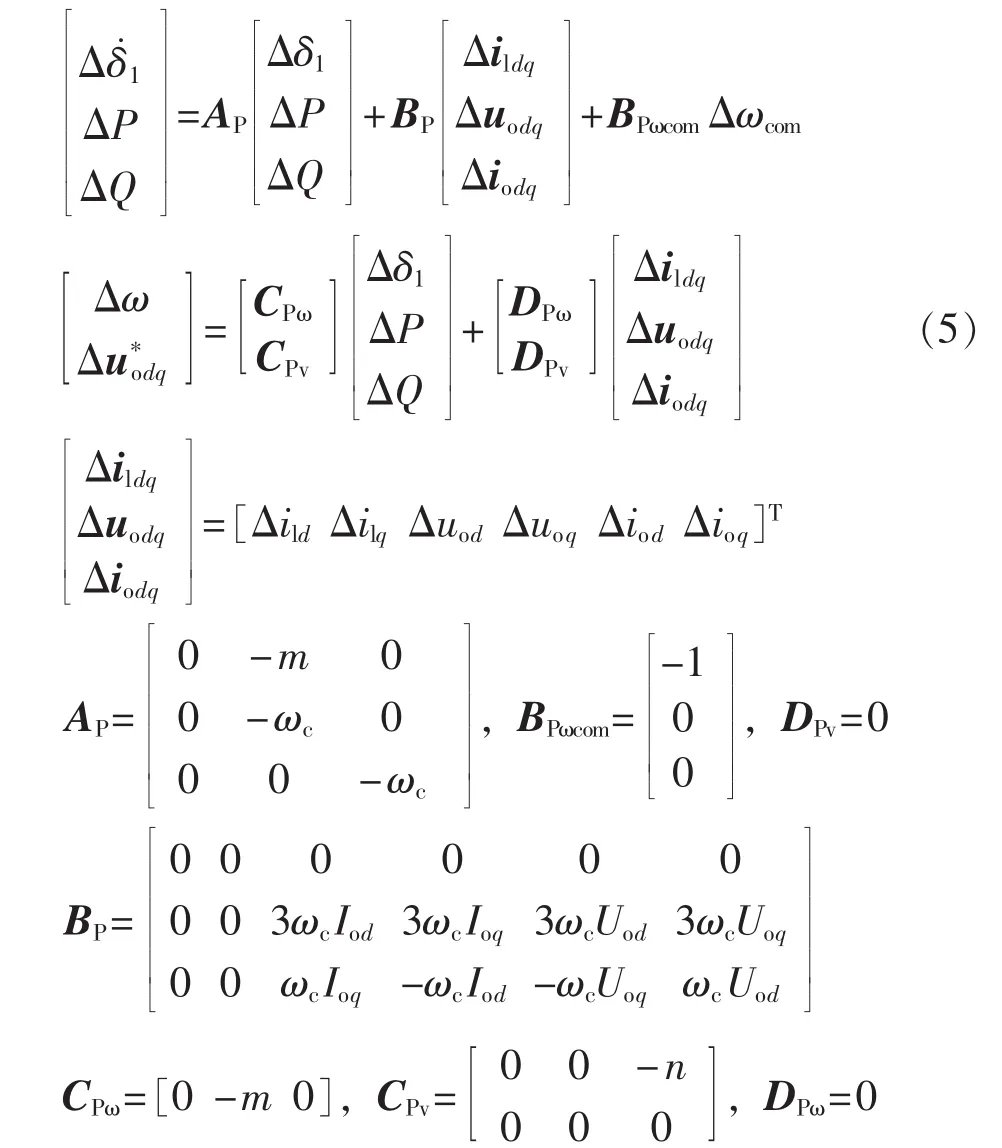
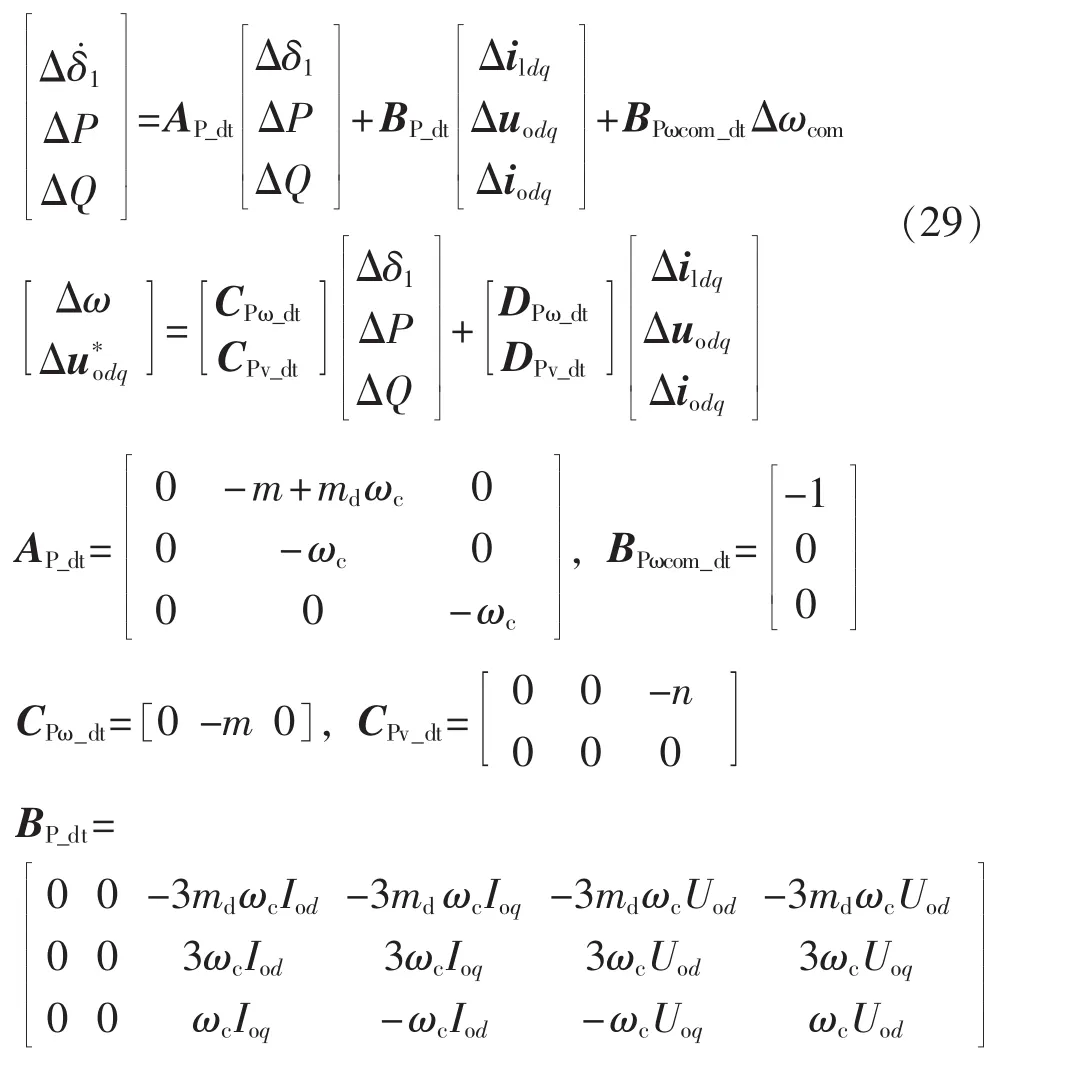
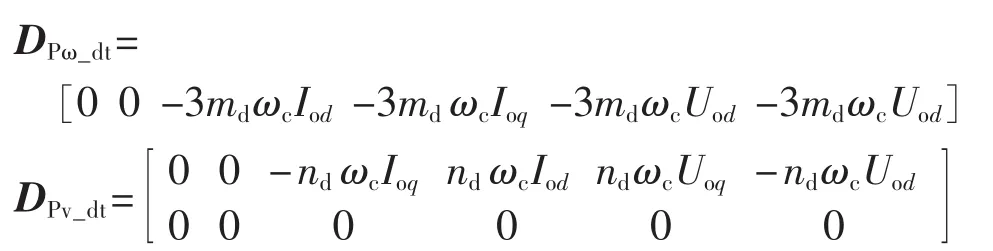
整个系统为多电源系统,需要设定一个公共dq坐标系的参考角频率ωcom,使各电源的模型最终都建立在公共坐标系下。设稳态时逆变器坐标系与公共坐标系的相位差为 δ1。联立式(1)—(4),线性化后功率环小信号模型如下。
2.2 电压环与电流环小信号子模型
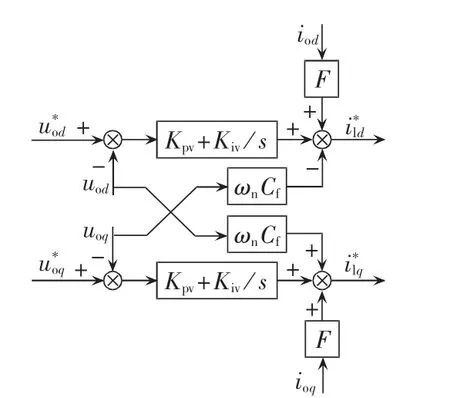
图3 电压环Fig.3 Voltage controller
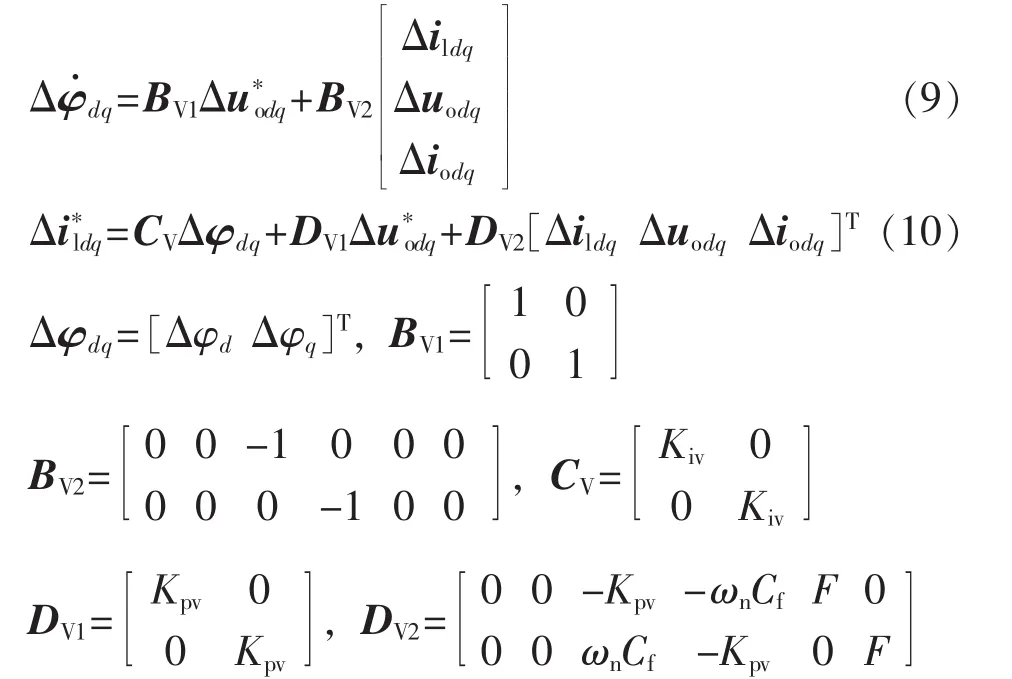
电压外环结构如图3所示,其由输出电压、电流反馈与PI控制器组成,其中F为电流反馈系数。设φd、φq分别为2个PI控制器积分环节的输出,则可将其用微分方程表示为:

则电压环输出可表示为:

线性化后电压环小信号模型为:
电流内环结构如图4所示,由逆变侧电感电流反馈与PI控制器组成。
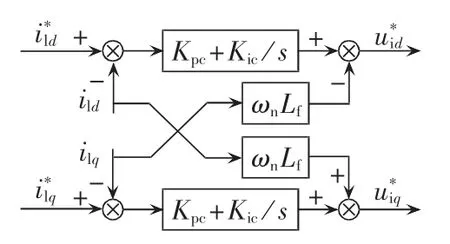
图4 电流环Fig.4 Current controller
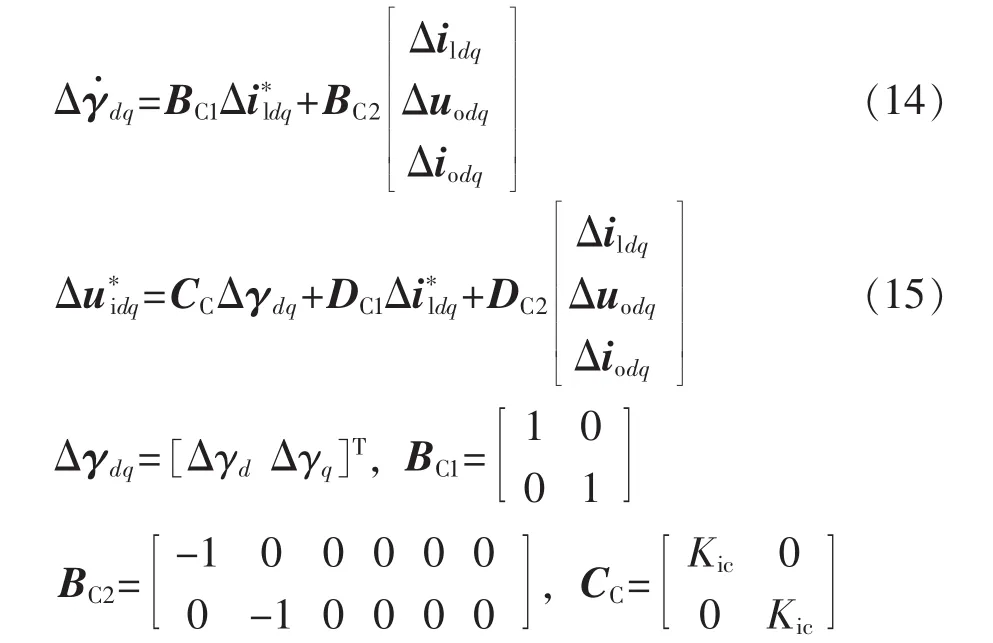
设 γd、γq分别为2个 PI控制器积分环节的输出,则可将其用微分方程表示为:

则电流环输出的参考电压可表示为:

线性化后电流环小信号模型为:

2.3 输出电路小信号子模型
逆变器输出电路由LCL滤波器和并网输电线路组成。忽略逆变桥路损耗,可假设电流环输出参考电压等于逆变桥路输出电压,即。则逆变器输出电路微分方程表示如下:
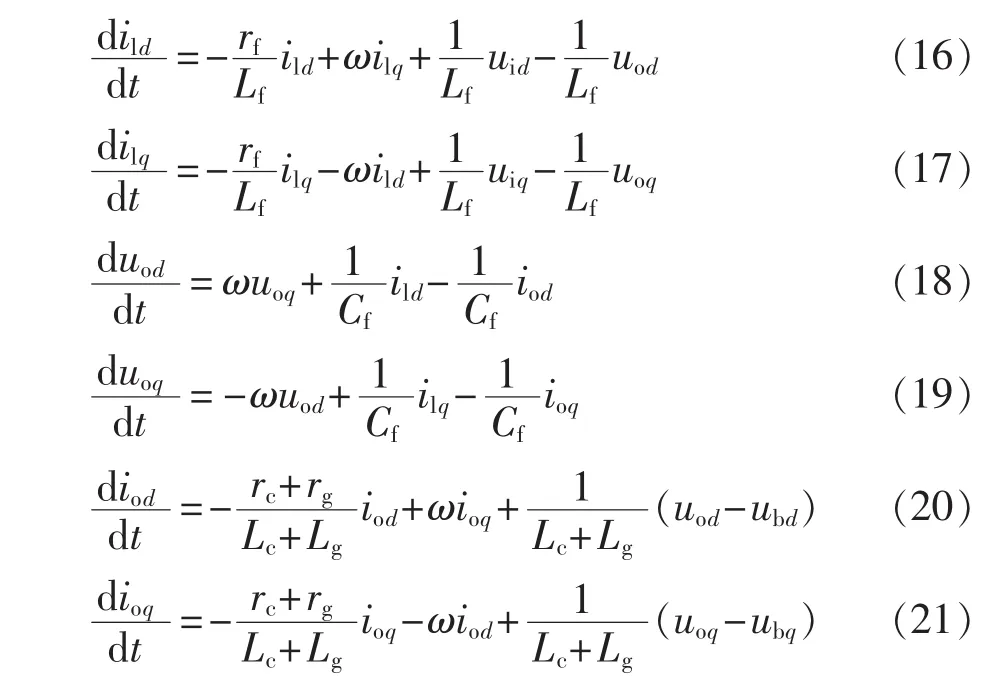
其中,rf、rc分別为电感 Lf、Lc上等效电阻;rg、Lg分别为输电线路等效电阻、等效电感。母线电压幅值为Ubus,为了简化模型,设逆变器坐标系为公共参考系,母线电压与公共参考系的相位差为δ2。则有:

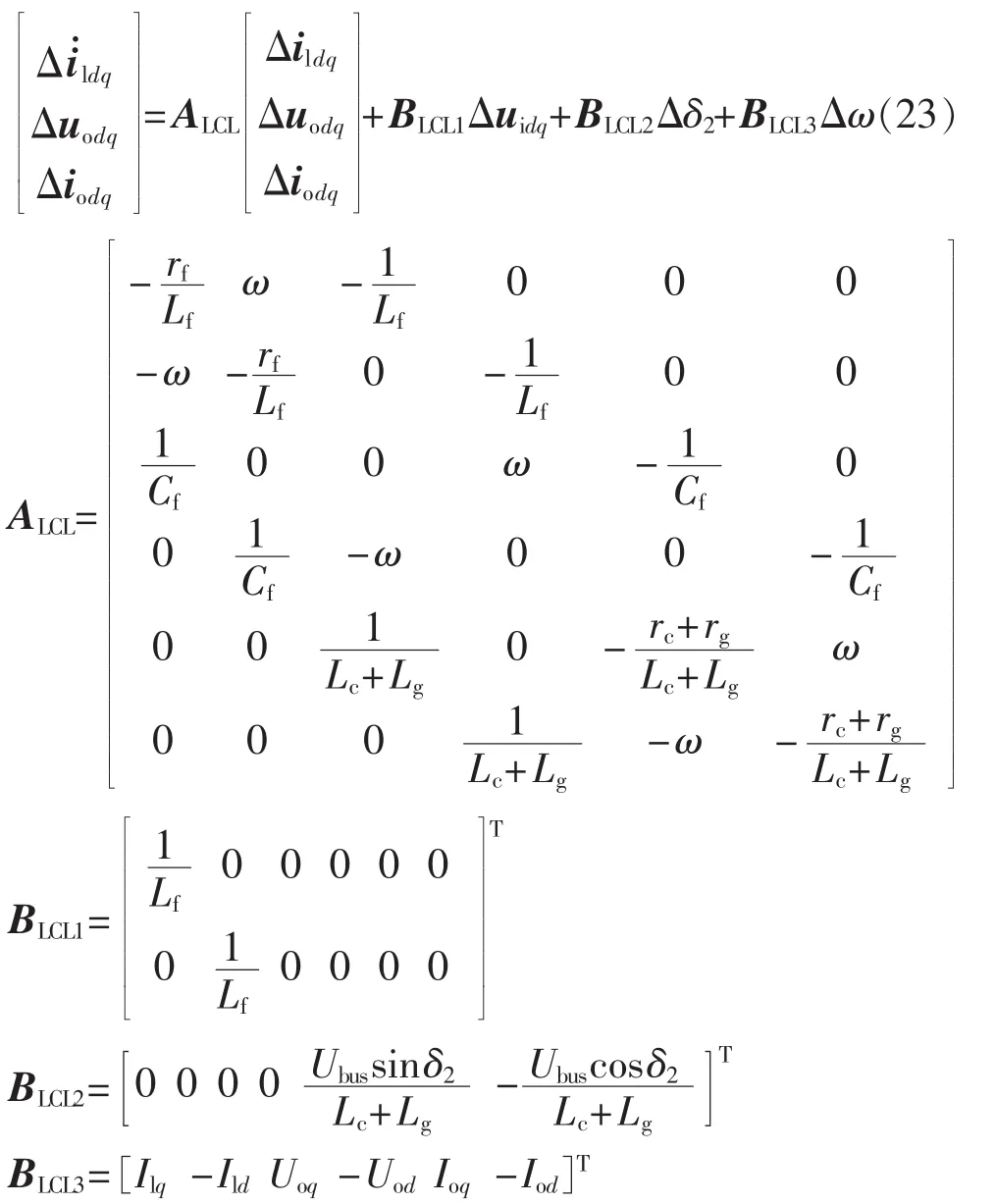
线性化后输出电路小信号模型为:
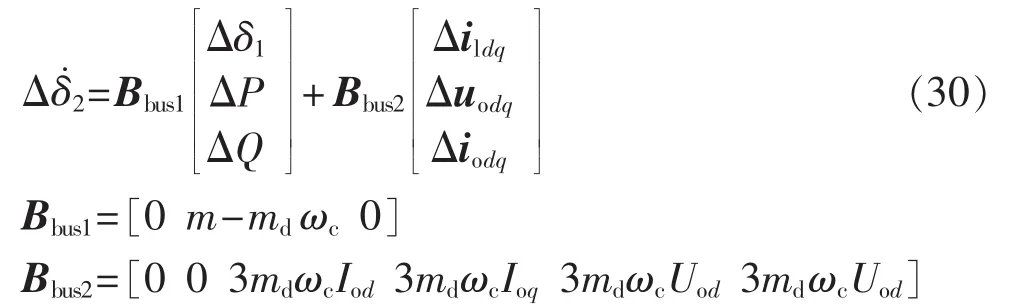
2.4 母线小信号子模型
母线电压幅值频率恒定,则母线与公共坐标系相位差δ2可由如下微分方程表示:

线性化后可得母线小信号模型为:

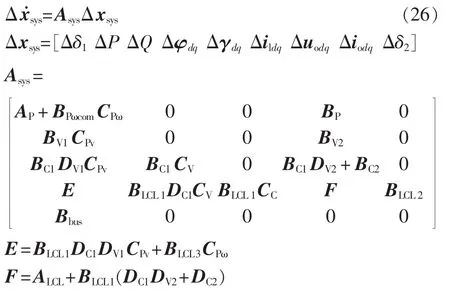
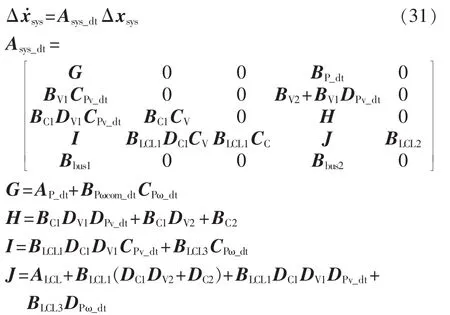
2.5 整个系统小信号模型
综合以上各个子模型,联立式(5)、(9)、(10)、(14)、(15)、(23)、(25)可得整个系统小信号模型为:
3 改进的下垂控制小信号模型
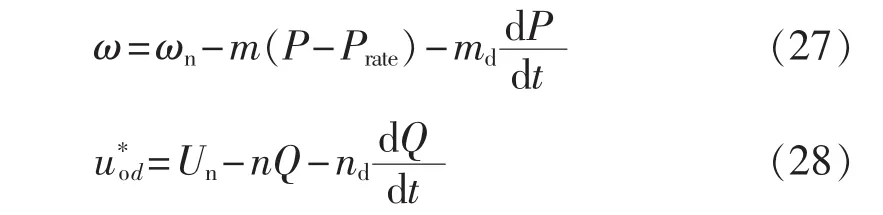
2.1节介绍了经典下垂控制的策略,其下垂方程为纯代数方程,其缺点是在系统受到扰动或者改变状态时,容易产生低频率的振荡,对系统稳定运行造成隐患。为消除此隐患,在下垂方程中增加功率微分项,改进后的加功率微分的下垂方程如下:
则功率环小信号子模型为:
母线小信号模型为:
其他子模块小信号模型不变。加入功率微分后整个系统小信号模型为:
4 小信号稳定性分析与验证
在MATLAB/Simulink中建立如图1所示的逆变器并网模型。其初始运行状态如下:P=10 kW,Q=-18.5 kvar,Ild=15.13 A,Ilq=31.48 A,Uod=220.3 V,Uoq=0V,Iod=15.13 A,Ioq=28.02 A,δ1=0°,δ2=2.3°,ω=314.1 rad /s。系统参数如下:Lf=1.4 mH,rf=0.1 Ω,Lc=0.35mH,rc=0.03 Ω,Cf=50 μF,ωc=31.41 rad /s,Lg=26.9 μH,rg=0.22 Ω,Kpv=0.05,Kiv=390,Kpc=10.5,Kic=1.6×104,F=0.75,ωn=314.1rad /s,Un=220V,Prate=10kW。
4.1 下垂系数对小信号稳定性影响分析
根据所建立的经典下垂控制与改进的加功率微分的下垂控制的小信号模型,计算初始状态下的全部特征值。高频域与中频域特征根对系统低频域动态性能和稳定性影响很小,可忽略[16]。当 n=5×10-5、md=nd=8×10-6,m 从 1×10-5增加到 1×10-3时,2 种控制策略的低频域主特征根轨迹如图5所示。
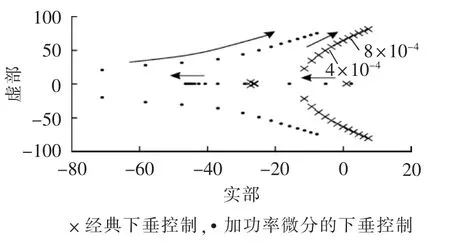
图5 随着m增大系统低频域特征根轨迹Fig.5 Trajectory of low-frequency characteristic root when m increases
可见,随着m增大,2种控制策略靠近虚轴的一对共轭根向正实部平面移动。当m=8×10-4时,经典下垂控制的共轭根进入正实部平面,系统不稳定;而加功率微分项控制的特征根均位于负实部平面,说明加入功率微分项后使系统稳定的m的取值范围增大。并且,这对共轭根在加入功率微分后相对于经典下垂控制其实部绝对值更大,说明加入功率微分后系统阻尼增加,有利于消除振荡、提高系统的稳定性。
图6为m=8×10-4,初始运行状态下逆变器输出功率增加20%时的时域仿真图。
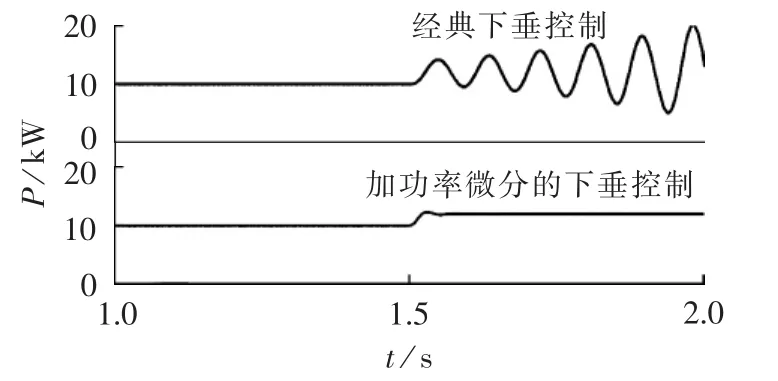
图6 有功功率波形(m=8×10-4)Fig.6 Waveforms of active power when m=8×10-4
由图5可知,m=8×10-4时,经典下垂控制的根轨迹进入正实部平面,系统不稳定,而加功率微分下垂控制的根轨迹仍在负实部平面内,系统是稳定的。通过图6可知,经典下垂控制受扰后系统失稳,加功率微分的下垂控制受扰后系统稳定。说明了上述分析的正确性,间接验证了小信号模型的正确性。
图7为m=4×10-4,初始运行状态下逆变器输出功率增加20%时的时域仿真图。

图7 有功功率波形(m=4×10-4)Fig.7 Waveforms of active power when m=4×10-4
由图5可知,m=4×10-4时,2种控制策略的特征根均位于负实部平面,系统都是稳定的。靠近虚轴的一对共轭根分别为-6.9±j52.2(经典下垂)和-27.7±j47.4(加功率微分)。阻尼比分别为0.13(经典下垂)和0.5(加功率微分),加功率微分的下垂控制具有更大的阻尼比。经典下垂控制特征根对应的振荡周期为0.12 s。由图7可见,受扰后经典下垂控制的有功输出经过几个周期的振荡后稳定,振荡周期为0.12 s,与小信号模型计算出的特征根对应的振荡周期吻合,再次验证了小信号模型的正确性;加功率微分的下垂控制在受扰后功率输出没有出现振荡,也与其具有更大的阻尼比的分析吻合。
当 m=8×10-5、md=nd=8×10-6,n 从 1×10-5增加到7.5×10-4时,2种控制策略低频域主特征根轨迹如图8所示。可见,随着n的增大,靠近虚轴的一对共轭根远离虚轴,而单个实根向虚轴靠近,最终在n=5.6×10-4时进入正实部平面,系统不稳定;且加功率微分的下垂控制的共轭特征根始终具有比经典下垂控制更大的实部绝对值,因此也具有更大的阻尼比。
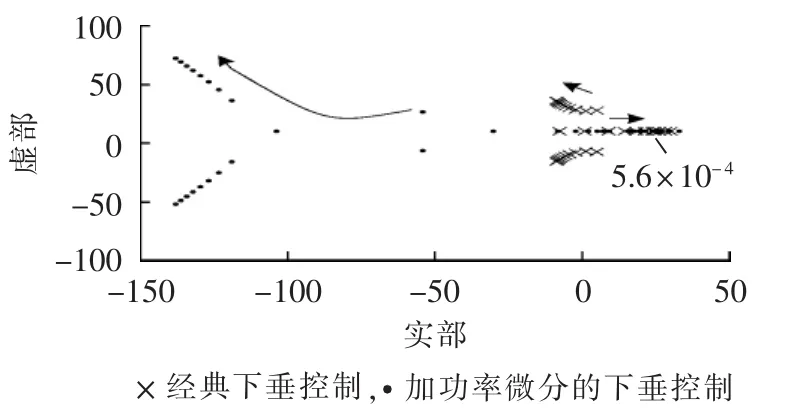
图8 随着n增大系统低频域特征根轨迹Fig.8 Trajectory of low-frequency characteristic root when n increases
图9为n=5×10-4,初始运行状态下逆变器输出功率增加20%时的时域仿真图。
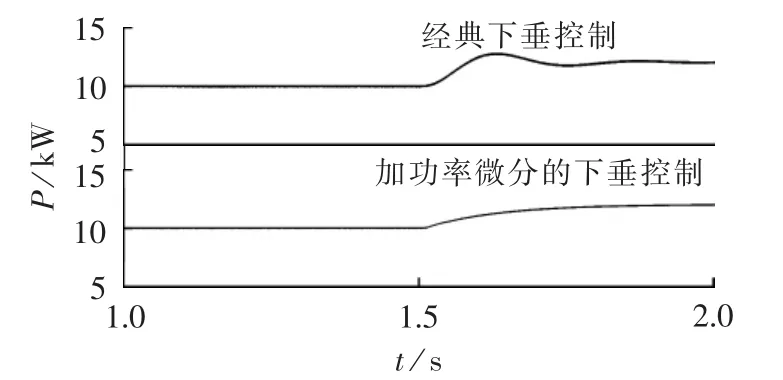
图9 有功功率波形(n=5×10-4)Fig.9 Waveforms of active power when n=5×10-4
由图8可知,当n=5×10-4时,2种控制策略的特征根均位于负实部平面,系统是稳定的。经典下垂控制靠近虚轴的一对共轭根为-25.4±j24.7,则振荡周期为0.25 s,阻尼比为0.72,振荡衰减较快,与图9结果吻合。加功率微分项下垂控制的共轭根为-124±j54,离虚轴过远,由靠近虚轴的负实根-16.7主导,系统无低频振荡模态,与图9结果吻合。
4.2 功率微分系数对小信号稳定性及系统动态响应的影响分析
讨论功率微分系数md、nd对系统稳定性的影响。下垂系数取 m=8×10-5、n=5×10-5时,md、nd从1×10-7变化到3×10-5,低频域特征根轨迹如图10所示。可见,随着参数的增大,系统共轭特征根经历先远离虚轴,再靠近虚轴,最终进入正实部平面的过程。这表明,参数md、nd取太小,系统阻尼不够,易发生振荡;取太大也会导致系统阻尼不够,甚至失稳。下文通过仿真验证这一结论。
图11为功率微分系数md、nd取不同的值,初始运行状态下逆变器输出功率增加20%时的时域仿真图。可见,当md、nd取1×10-7时,系统阻尼比较小,输出功率存在超调;当md、nd取4×10-6时,系统阻尼比增大,输出功率无振荡,但动态响应时间增大;当md、nd取2.75×10-5时,系统失稳。以上结果与图10中系统特征根轨迹分析吻合。
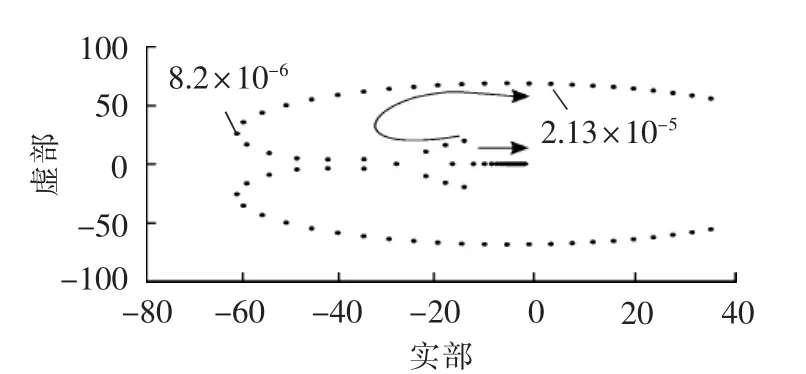
图10 随着md、nd增大系统低频域特征根轨迹Fig.10 Trajectory of low-frequency characteristic root when mdand ndincrease
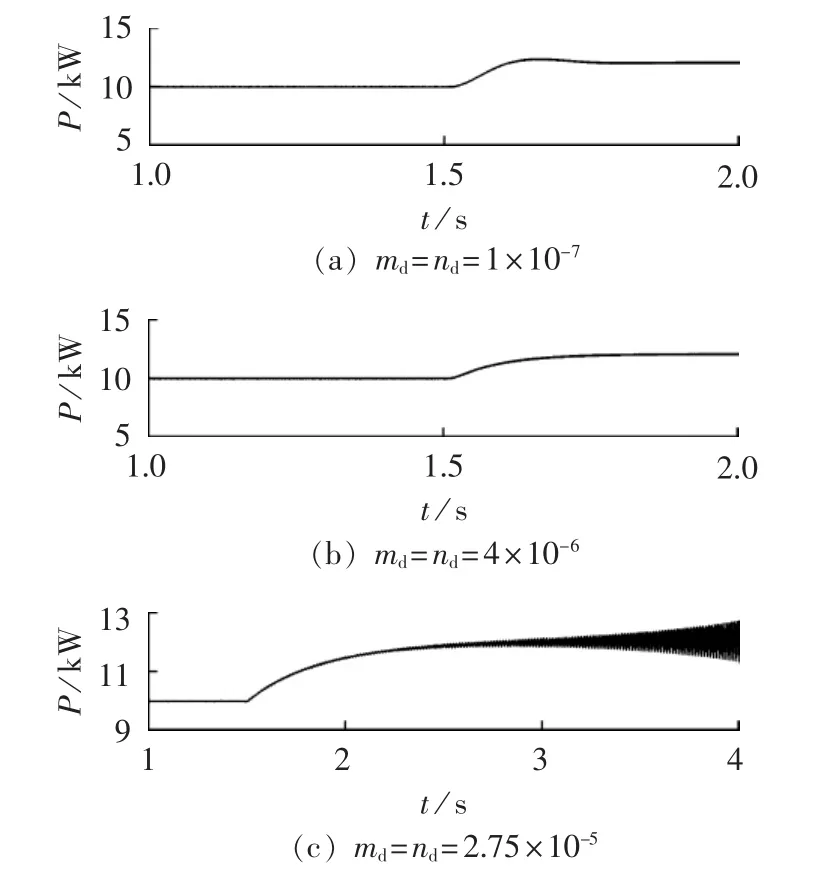
图11 有功功率波形Fig.11 Waveforms of active power
综上分析可知,功率微分项的引入增大了系统阻尼,有利于系统的稳定,但过大的阻尼也可能影响系统的响应速度。一般而言,电力系统中负荷的动态响应时间是数百毫秒级甚至秒级,电源的响应时间应短于负荷的响应时间。因此在实际应用中,下垂系数与功率微分系数的选取应该综合考虑逆变器的小信号稳定性与负荷端的动态特性。
5 结论
经典的下垂控制存在受扰后系统易发生振荡的缺陷,对此,本文提出了引入功率微分项的下垂控制策略,建立了经典下垂控制和所提加功率微分项下垂控制的逆变器并网小信号模型。通过分析2种控制策略下系统特征根的分布,得到加入功率微分后系统阻尼增加、振荡受到抑制的结论;通过分析下垂系数以及功率微分系数对系统特征根分布的影响,得到各系数与系统动态特性和稳定性的关系,为系统参数的选取提供了理论依据;最后通过仿真验证了建模与分析的正确性。
[1]王成山,李鹏.分布式发电、微网与智能配电网的发展与挑战[J].电力系统自动化,2010,34(2):10-14.WANG Chengshan,LIPeng.Developmentand challengesof distributed generation,the micro-grid and smart distribution system[J].Automation of Electric Power Systems,2010,34(2):10-14.
[2]于慎航,孙莹,牛晓娜,等.基于分布式可再生能源发电的能源互联网系统[J].电力自动化设备,2010,30(5):104-108.YU Shenhang,SUN Ying,NIU Xiaona,etal.Energy internet system based on distributed renewable energy generation [J].Electric Power Automation Equipment,2010,30(5):104-108.
[3]李鹏,窦鹏冲,李雨薇,等.微电网技术在主动配电网中的应用[J].电力自动化设备,2015,35(4):8-16.LI Peng,DOU Pengchong,LI Yuwei,et al.Application of microgrid technology in active distribution network[J].Electric Power Automation Equipment,2015,35(4):8-16.
[4]夏榆杭,刘俊勇.基于分布式发电的虚拟发电厂研究综述[J].电力自动化设备,2016,36(4):100-106,115.XIA Yuhang,LIU Junyong.Review of virtual power plant based on distributed generation[J].Electric Power Automation Equipment,2016,36(4):100-106,115.
[5]郑连清,庄琛,马世强,等.微电网改进负荷功率分配策略与并网稳定性分析[J].电力自动化设备,2015,35(4):17-23.ZHENG Lianqing,ZHUANG Chen,MA Shiqiang,et al.Improved load power allocation strategy for microgrid and grid-connection stability analysis[J].Electric Power Automation Equipment,2015,35(4):17-23.
[6]郭小强,邬伟扬,顾和荣,等.并网逆变器LCL接口直接输出电流控制建模及稳定性分析[J].电工技术学报,2010,25(3):102-109.GUO Xiaoqiang,WU Weiyang,GU Herong,et al.Modelling and stability analysis of direct output current control for LCL interfaced grid-connected inverters[J].Transactions of China Electrotechnical Society,2010,25(3):102-109.
[7]张建华,苏玲,刘若溪,等.逆变型分布式电源微网并网小信号稳定性分析[J].电力系统自动化,2011,35(6):76-80.ZHANG Jianhua,SU Ling,LIU Ruoxi,et al.Small-signal stability analysis of grid-connected microgrid with inverter-interfaced distributed resources[J].Automation of Electric Power Systems,2011,35(6):76-80.
[8]王成山,高菲,李鹏,等.低压微网控制策略研究[J].中国电机工程学报,2012,32(25):2-8.WANG Chengshan,GAO Fei,LIPeng,etal.Controlstrategy research on low voltage microgrid [J].Proceedings of the CSEE,2012,32(25):2-8.
[9]BRABANDERE K D,BOLSENS B,KEYBUS J V D,et al.A voltage and frequency droop control method for parallel inverters[J].IEEE Transactions on Power Electronics,2007,22 (4):1107-1115.
[10]郑永伟,陈民铀,李闯,等.自适应调节下垂系数的微电网控制策略[J].电力系统自动化,2013,37(7):6-11.ZHENG Yongwei,CHEN Minyou,LI Chuang,et al.A microgrid control strategy base on adaptive drooping coefficient adjustment[J].Automation of Electric Power Systems,2013,37(7):6-11.
[11]郜登科,姜建国,张宇华.使用电压-相角下垂控制的微电网控制策略设计[J].电力系统自动化,2012,36(5):29-34.GAO Dengke,JIANG Jianguo,ZHANG Yuhua.Design of microgrid control strategy using voltage amplitude and phase angle droop control[J].Automation of Electric Power Systems,2012,36(5):29-34.
[12]ZHONG Q C.Robust droop controller for accurate proportional load sharing among inverters operated in parallel[J].IEEE Transactions on Industrial Electronics,2011,60(4):1281-1290.
[13]张纯江,王晓寰,薛海芬,等.微网中三相逆变器类功率下垂控制和并联系统小信号建模与分析[J].电工技术学报,2012,27(1):32-39.ZHANG Chunjiang,WANG Xiaohuan,XUE Haifen,et al.A quasipower droop control of three-phase inverters and small signal modeling and analysis of parallel system in micro-grid[J].Transactions of China Electrotechnical Society,2012,27(1):32-39.
[14]王康,金宇清,甘德强,等.电力系统小信号稳定分析与控制综述[J].电力自动化设备,2009,29(5):10-19.WANG Kang,JIN Yuqing,GAN Deqiang,et al.Survey of power system small signal stability and control[J].Electric Power Automation Equipment,2009,29(5):10-19.
[15]KUNDUR P,PASERBA J,AJJARAPU V,et al.Definition and classification of power system stability[J].IEEE Transactions on Power Systems,2004,19(2):1387-1400.
[16]POGAKU N,PRODANOVIC M,GREEN T C.Modeling analysis and testing of autonomous operation of an inverter-based microgrid[J].IEEE Transactions on Power Electronics,2007,22(2):613-615.