水轮发电机定子单相接地故障定位新方法
2017-05-24贾文超黄少锋
贾文超,黄少锋
(华北电力大学 新能源电力系统国家重点实验室,河北 保定 071003)
0 引言
大型水轮发电机多采用多分支结构,发电机对地分布电容较大,定子绕组单相接地故障可能造成定子铁芯灼伤或发展成更严重的故障[1-2]。目前主要的保护原理有基波零序电压保护[3-4]、3次谐波电压保护[5]和注入式定子单相接地保护[6-8]。上述保护原理成熟,在现场得到了广泛应用,但均没有故障定位功能。实现大型水轮发电机定子单相接地故障定位能扩展目前保护的功能,为故障快速检修提供参考。
基波零序电压幅值受中性点接地方式和接地点过渡电阻的影响较大,仅利用零序电压幅值不能实现准确的故障定位。文献[9-10]利用行波信号实现定子单相接地故障定位,但行波信号测量困难,且受故障时刻和故障点过渡电阻影响较大。文献[11]首先利用注入信号计算接地电阻,再根据零序电压幅值计算故障点位置。该方法需要注入式定子接地保护,应用范围受限,且接地电阻的计算误差受配电变压器参数的影响。文献[12]提出一种不依赖注入信号的定子单相接地故障定位方法,利用机端三相电压大小与过渡电阻有关的特征,通过最高相与次高相电压的平方差和最高相与故障相电压的平方差比值计算过渡电阻。文献[13-14]利用计算绕组合成电势的相位寻找故障位置,该方法仍然利用了注入式定子接地保护,应用范围受限,且水轮发电机每极每相槽数一般为分数,即绕组合成电势的相位角与故障位置不存在唯一对应关系,所以不适用于水轮发电机。
针对上述问题,本文以瀑布沟600 MW水轮发电机机组为例对水轮发电机绕组电动势特征进行了分析,给出了水轮发电机绕组基波电势和故障位置关系的近似表达式。分析了发生定子单相接地故障时基波零序电压相位与过渡电阻和故障位置的关系,提出了一种适用于大型水轮发电机的定子单相接地故障定位方法,该方法同时利用了基波零序电压幅值和相位,适用于各种中性点接地方式。对所提出的方法进行了仿真分析。
1 定子单相接地故障定位的关键技术
发电机定子A相接地故障的示意图如图1所示。图1中,CA、CB和 CC分别为定子绕组 A、B、C相对地电容;Rk为接地故障电阻;E(α)为故障点到中性点的绕组基波合成电势,α为故障点到中性点的定子绕组匝数占总绕组匝数的百分比;Ik为故障点的接地电流;EB和EC分别为故障前发电机B、C相的基波电势,该基波电势为包含电枢反应电势的总电势;U0为故障后的基波零序电压;Z为中性点的接地阻抗,其数值与发电机中性点的接地方式有关。
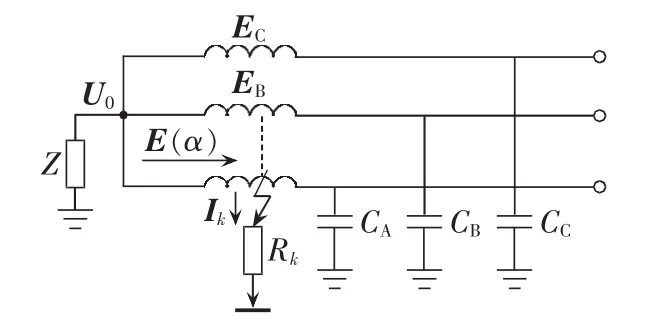
图1 发电机定子单相接地故障原理图Fig.1 Schematic diagram of generator stator single-phase grounding fault
正常运行时有:

其中,为故障前基波零序电压;EA为故障前发电机A相基波电势;C∑为发电机三相对地的总电容。
发生定子单相接地故障后,忽略分布电容产生的暂态电压分量,仅考虑基波电压分量,由图1可得:
联立式(1)—(3)可得:

其中,ΔU0为故障后基波零序电压的故障分量。
当发电机参数三相对称时,正常运行时产生的基波零序电压为。忽略对E(α)的影响,可得基波零序电压故障分量的表达式为:

发电机发生定子单相接地故障时,传统分析均假设 E(α)=αEA,考虑到绕组基波合成电势 E(α)与相电势 EA的相位差 θ,本文定义 E(α)=αEAejθ,代入式(5),可得故障位置表达式为:

由式(6)分析可得:故障定位的关键是计算接地电阻值。对于采用注入式定子接地保护的机组,可利用注入信号计算接地电阻。若不采用注入式定子接地保护,接地电阻的计算是故障定位的关键。本文综合分析了定子单相接地故障后故障分量基波零序电压的幅值和相位特征,提出了一种适用于水轮发电机的单相接地故障定位方法。
2 水轮发电机绕组电动势特征分析
大型水轮发电机多为凸极发电机,采用多分支结构。
以瀑布沟600 MW水轮发电机为例,参数如下:额定功率为600 MW,额定电压为20 kV;定子铁芯槽数NI=540,定子每相分支数为6,每分支绕组匝数为30匝,极对数p=24,每极相数m=3,每极每相槽数,第一节距y1=10,第二节距y2=9,定子绕组采用叠绕方式连接,绕组按60°相带分布。
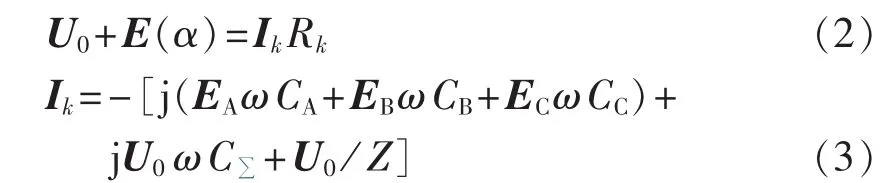
该机组A相第1分支的中性点由第479槽的下层边开始,从中性点到机端A1分支的绕线规律为,即从中性点开始负向绕3匝线圈,然后正向绕4匝线圈,接着负向绕4匝线圈,再正向绕4匝线圈。A相第1分支部分绕组展开图如图2所示。
水轮发电机的电角度 β=(p×360)/NI=16°。
A相第1分支绕组基波电势相量图如图3所示。
图2 A相第1分支绕组展开图Fig.2 Expansion drawing of winding of phase-A first branch
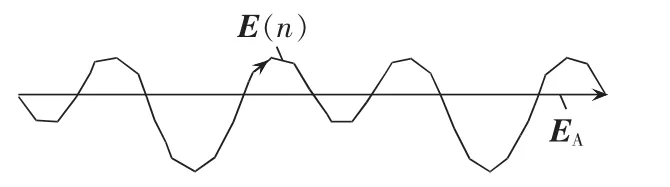
图3 A相第1分支基波电势相量图Fig.3 Phasor diagram of fundamental potential of phase-A first branch
定义第1匝绕组下层边第479槽线棒的基波电势为El1,由第一节距y1=10可得,第1匝绕组上层边第469槽线棒的基波电势E′l1=El1ejy1β,第1匝绕组的基波匝电势为Ec1=El1-E′l1。按照绕组连接关系,同理可计算出各匝的基波匝电势。利用MATLAB软件编程,将各匝电势叠加,可计算水轮发电机A相基波电势EA和前n匝绕组的合成电势E(n)。定义EA=和 E(n)的误差100%,可得 E(n)的幅值 E(n)和绕组匝数 n的关系如表1所示。

表1 绕组电势幅值和绕组匝数的关系Table 1 Relationship between winding potential amplitude and winding turns
A相第1分支绕组的合成电势E(n)与EA的相位 θ(n)和绕组匝数n的关系如表2所示。
目前的大型水轮发电机多采用多分支结构,其转速较慢,多为凸极发电机,极对数较多,每极每相槽数q一般为分数槽绕组,范围为2~4;由于定子绕组每分支匝数较多,故定子绕组合成电势与相电势的相位差很小。故对于大型水轮发电机,定子绕组的合成电势与相电势间的相位差可忽略,即可假设 E(α)=αEφ,Eφ为故障相 φ(φ=A,B,C)的基波电势。
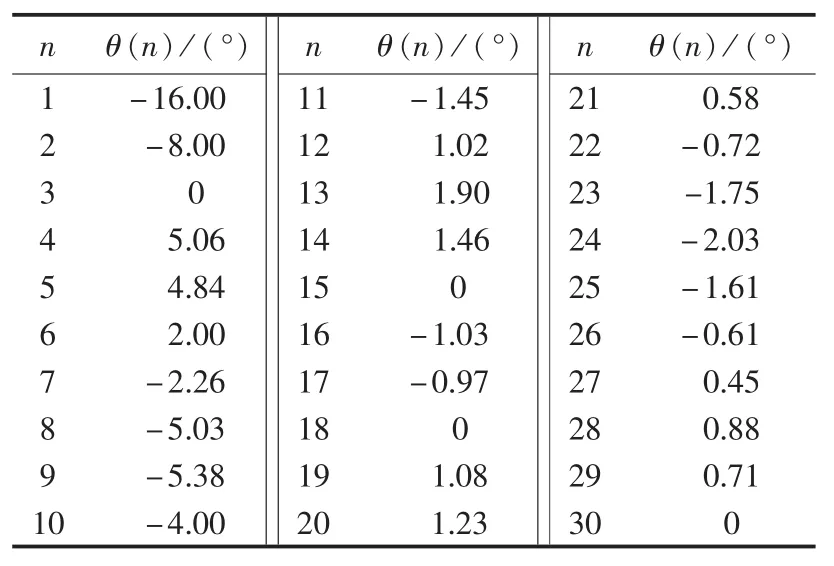
表2 绕组电势相位角和绕组匝数的关系Table 2 Relationship between winding potential phase-angle and winding turns
3 水轮发电机定子单相接地故障定位方法
3.1 定子单相接地故障定位的基本原理
定子单相接地故障选相是定子单相接地故障定位的基础,高阻接地故障时,低电压选相算法的灵敏度较低,文献[15]提出了一种基于基波零序电压故障分量相位特征的选相算法,本文利用该方法首先选出故障接地相。
故障分量基波零序电压的大小和故障位置、过渡电阻有关。仅利用基波零序电压大小不能准确定位故障位置,本文提出了一种适用于大型水轮发电机的定子单相接地故障定位方法。
定义基波零序电压故障分量ΔU0和故障相基波电势Eφ的相位差为:

其中,Eφ不能直接测量,以A相为例,可以由EA=计算得到。
由式(5)计算基波零序电压故障分量ΔU0和故障相基波电势Eφ的相位关系可得:

180°-arg(Rk/Z+1+jωC∑Rk) φ=A,B,C (8)即φm的大小仅与中性点接地阻抗、定子绕组总对地容抗和接地电阻有关。接地变压器的接地阻抗和定子绕组总对地容抗为已知量,由式(8)即可计算出接地故障电阻Rk。
中性点经高阻Z=RN(RN为接地变压器负载电阻)接地,则有:

中性点经消弧线圈Z=XL接地,则有:

将计算所得过渡电阻值代入式(5),即可确定故障点位置:

3.2 误差分析
考虑绕组的基波合成电势与基波相电势的相位特征,定义 E(α)=αEAejθ,则基波零序电压故障分量ΔU0和故障相基波电势Eφ的相位关系为:

由式(12)计算接地故障电阻 R′k。
中性点经高阻Z=RN接地,则有:

中性点经消弧线圈Z=XL接地,则有:

重新计算故障位置,可得:

定义定子单相接地故障定位相对误差为:

大型水轮发电机一般采用中性点经高阻接地或经消弧线圈接地,对2种接地方式下的定子单相接地故障定位方法的误差进行分析。
a.经高阻接地方式。
当中性点经接地变压器接地时有Z=RN,一般取RN=1/(ωC∑)。
绕组合成电势与相电势的相位角θ的范围取-2°~2°。接地故障电阻Rk和发电机定子绕组总对地容抗 1/(ωC∑)的比值 d(d=RkωC∑)取 0~1 时,定位误差的数据表如表3所示。
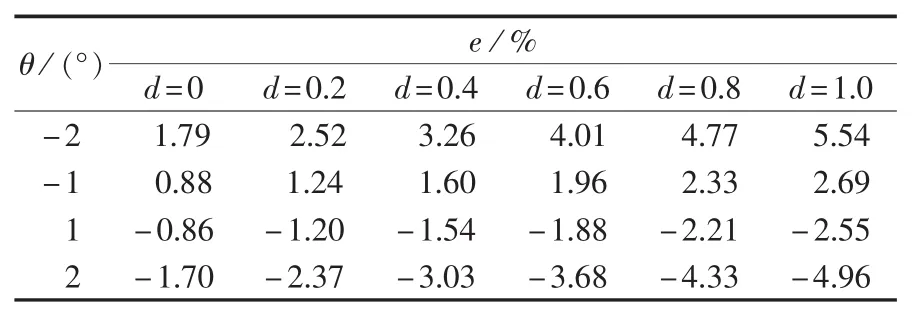
表3 中性点经高阻接地时的定位误差Table 3 Fault locating errors when neutralpoint is grounded via high resistance
b.经消弧线圈接地方式。
中性点经消弧线圈接地时有 Z=XL(XL=jωLN,LN为消弧线圈的电感)。
定义补偿度系数 v=1/(ω2LNC∑),水轮发电机一般采用欠补偿方式,取补偿度系数v=0.85。
绕组合成电势与相电势的相位差θ的范围取-2°~2°。接地故障电阻Rk和定子绕组总对地容抗1/(ωC∑)的比值 d(d=RkωC∑)取 0~1 时,定子单相接地故障的定位误差的数据如表4所示。

表4 中性点经消弧线圈接地时的定位误差Table 4 Fault location errors when neutral-point is grounded via arc suppression coil
3.3 发电机参数不平衡对算法的影响
当水轮发电机三相参数不对称时,基波零序电压故障分量的表达式为:

为减小正常运行时的零序电压对定子单相接地故障定位算法的影响,可对其进行一次修正。
利用式(9)—(11)得到的接地电阻 Rk计算 ΔU′0。

计算ΔU′0和故障相基波电势Eφ的相位差,代入式(9)—(11)重新计算接地电阻,可修正故障位置。
4 仿真分析
按照瀑布沟机组绕组结构,利用电磁暂态仿真软件EMTDC建立了水轮发电机定子单相接地故障仿真模型,定子绕组采用分布参数电路模型,划分为30个单元电路,定子绕组的电阻、漏电感和对地分布电容均分到各单元中。水轮发电机额定容量PN=600 MW,额定电压UN=20 kV,定子每相分支数为6,定子绕组每相电阻Rs=1.03mΩ,每相定子漏电感Ls=445.63 μH,每相对地电容 CG=1.42 μF。与水轮发电机出口母线相连的其他设备每相对地电容CB=0.2 μF,接地高阻RN=655 Ω,消弧线圈电感LN=2.45 H。
故障点设置为A相距中性点15匝(α=50%)和21 匝(α=70%)处,Rk分别取 20 Ω、500 Ω、1000 Ω、3 000 Ω,考虑水轮发电机三相参数不平衡对算法的影响,取CA=CB、CC=0.95CA,对水轮发电机中性点经高阻接地和经消弧线圈接地2种方式进行仿真分析,利用原始算法和修正后的算法计算测量电阻和故障位置,仿真结果如表5所示(其中U0、EA分别为 U0、EA的幅值)。
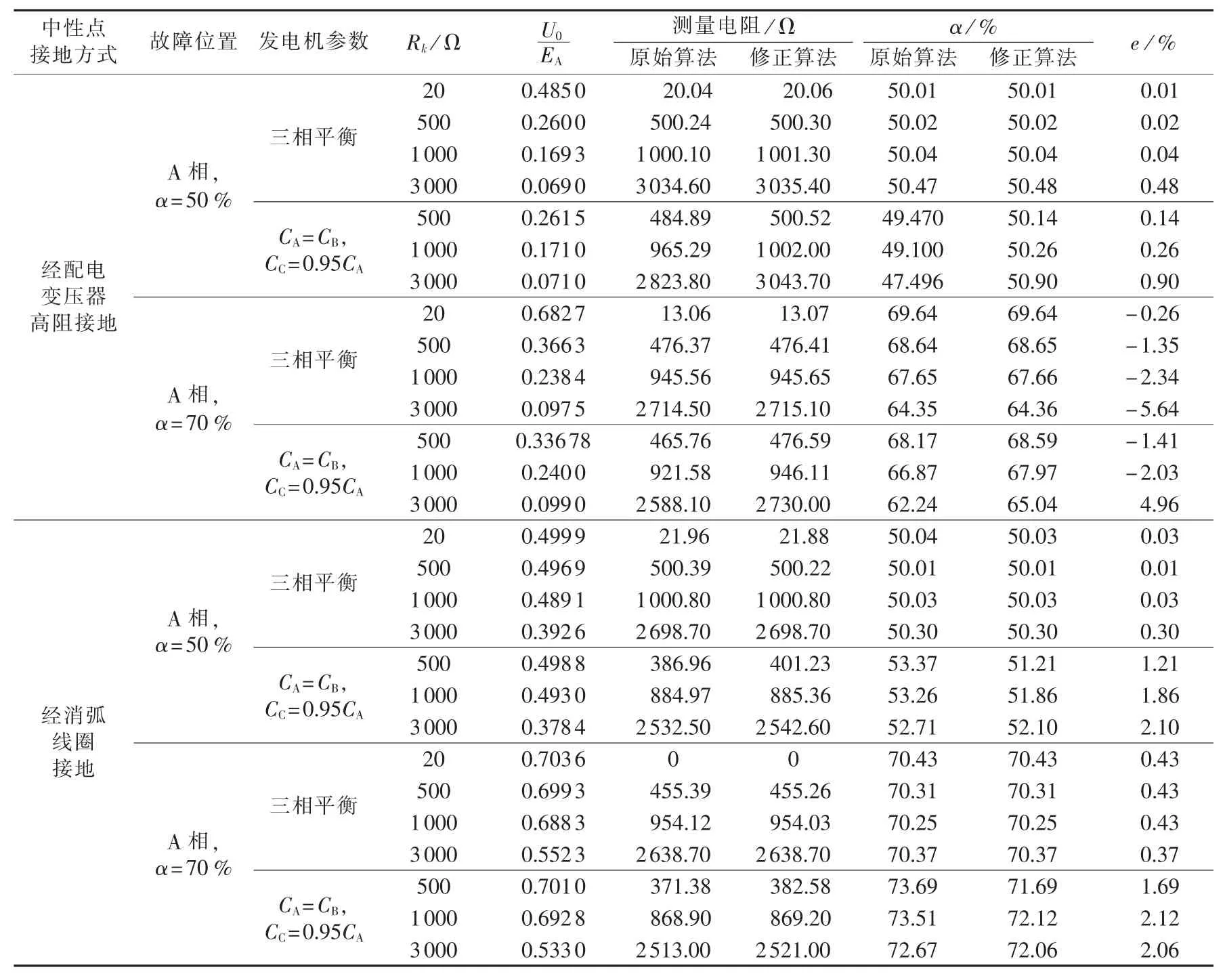
表5 仿真计算结果Table 5 Results of simulative calculation
由表5分析可得:
a.利用基波零序电压幅值的定子单相故障定位方法,在高阻接地时已不适用;
b.所提出的定子单相故障定位方法适用于各种中性点接地方式,定位结果较准确,而高阻接地时,受绕组合成电势相位的影响,定位误差会增大,但处于允许范围内;
c.水轮发电机自身参数的不平衡对算法影响较小,且利用修正算法能减小自身参数不平衡对算法的影响。
5 结论
发电机单相接地故障时,基波零序电压的大小受过渡电阻的影响较大。本文分析了大型水轮发电机的绕组基波电势特征,定子单相接地故障时基波零序电压相位特征与故障位置和过渡电阻的关系,提出了一种适用于大型水轮发电机的定子绕组单相接地故障定位新原理。
所提定子单相故障定位方法综合利用了基波零序电压故障分量的幅值和相位信息,适用于各种中性点接地方式,简单易行,无需增加额外设备,在高阻接地故障时同样适用,仿真数据验证了该方法的可行性。
[1]王维俭.电气主设备继电保护原理与应用[M].2版.北京:中国电力出版社,2002:223-245.
[2]党晓强,邰能灵,王海田,等.大型水轮发电机定子接地方式及其继电保护的相关问题分析[J].电力自动化设备,2012,32(7):25-29.DANG Xiaoqiang,TAI Nengling,WANG Haitian,et al.Analysis of stator grounding modes of large-scale hydro-generator and its protection[J].Electric Power Automation Equipment,2012,32(7):25-29.
[3]TAI Nengling,STENZEL J.Differential protection based on zerosequence voltages for generator stator ground fault[J].IEEE Transactions on Power Delivery,2007,22(1):116-121.
[4]姚晴林,郭宝甫,解波,等.大型发电机基波零序过流过压保护新方案研究[J].电力系统保护与控制,2008,36(14):1-3.YAO Qinglin,GUO Baofu,XIE Bo,etal.Research on zerosequence fundamental over-current and over-voltage protection of large generator[J].Power System Protection and Control,2008,36(14):1-3.
[5]卢琪.提高三次谐波电压式定子接地保护动作可靠性的措施[J].电力自动化设备,2008,28(1):119-121.LU Qi.Reliability of stator grounding protection based on 3rd harmonic voltage[J].Electric Power Automation Equipment,2008,28(1):119-121.
[6]贾文超,黄少锋.双频注入式定子接地保护方案[J].电力自动化设备,2014,34(6):158-161.JIA Wenchao,HUANG Shaofeng.Stator single-phase grounding protection with double-frequency injecting source[J].Electric Power Automation Equipment,2014,34(6):158-161.
[7]刘亚东,王增平,苏毅,等.注入式定子接地保护的现场试验、整定和分析[J].电力自动化设备,2012,32(10):150-154.LIU Yadong,WANG Zengping,SU Yi,et al.Field test,setting and analysis of injecting source-based stator grounding protection[J].Electric Power Automation Equipment,2012,32 (10):150-154.
[8]兀鹏越,陈飞文,黄旭鹏,等.1036 MW机组注入式定子接地保护调试及动作分析[J].电力自动化设备,2011,31(3):147-150.WU Pengyue,CHEN Feiwen,HUANG Xupeng,etal.Commissioning and operational analysis of voltage-injection stator grounding protection for 1036 MW unit[J].Electric Power Automation Equipment,2011,31(3):147-150.
[9]党晓强,刘俊勇,刘继春,等.水轮发电机定子接地的行波电流差动保护与故障选相[J].中国电机工程学报,2008,28(7):79-83.DANG Xiaoqiang,LIU Junyong,LIU Jichun,et al.Current differential protection and faulty phase identification based on traveling wavesforstatorsingle phase to ground ofhydro generator[J].Proceedings of the CSEE,2008,28(7):79-83.
[10]党晓强,刘俊勇,杨可,等.水轮发电机定子单相接地故障行波定位[J].电力系统自动化,2006,30(23):74-78.DANG Xiaoqiang,LIU Junyong,YANG Ke,et al.Location for stator single phase to ground of hydro-generators based on fault traveling waves[J].Automation of Electric Power Systems,2006,30(23):74-78.
[11]毕大强,王祥珩,李德佳,等.发电机定子绕组单相接地故障的定位方法[J].电力系统自动化,2004,28(22):55-57.BI Daqiang,WANG Xiangheng,LI Dejia,et al.Location detection forthestatorsingle-phaseground faultofagenerator[J].Automation of Electric Power Systems,2004,28(22):55-57.
[12]陈俊,刘梓洪,王明溪,等.不依赖注入式原理的定子单相接地故障定位方法[J].电力系统自动化,2013,37(4):104-107.CHEN Jun,LIU Zihong,WANG Mingxi,et al.Location method for stator single-phase ground fault independent of injection type principle[J].Automation of Electric Power Systems,2013,37(4):104-107.
[13]王育学,尹项根,张哲,等.基于接地电流的大型发电机定子接地保护及其精确定位方法[J].中国电机工程学报,2013,33(31):147-154.WANG Yuxue,YIN Xianggen,ZHANG Zhe,etal.A novel protection and precise location method based on grounding currents for stator ground faults of large generators[J].Proceedings of the CSEE,2013,33(31):147-154.
[14]WANG Yuxue,YIN Xianggen,ZHANG Zhe.The fault-currentbased protection scheme and location algorithm forstator ground fault of a large generator[J].IEEE Transactions on Energy Conversion,2013,28(4):871-879.
[15]贾文超,黄少锋.基于零序电压故障分量相位特征的发电机定子单相接地故障选相[J].电力自动化设备,2016,36(5):116-121.JIA Wenchao,HUANG Shaofeng.Phase selection based on zero sequence voltage faultcomponentphase characteristics for generator stator single-phase ground fault[J].Electric Power Automation Equipment,2016,36(5):116-121.