钢环反射式光栅编码器在转台伺服系统中的应用*
2017-05-24赵金标朱庆生周小军李金鹏
赵金标,朱庆生,周小军,李金鹏
(1.中国科学院大学,北京 100049;2.中科院南京天文仪器研制中心,南京 210042;3.中科院南京天文仪器有限公司,南京 210042)
钢环反射式光栅编码器在转台伺服系统中的应用*
赵金标1,2,朱庆生2,3*,周小军2,3,李金鹏2,3
(1.中国科学院大学,北京 100049;2.中科院南京天文仪器研制中心,南京 210042;3.中科院南京天文仪器有限公司,南京 210042)
在使用望远镜转台伺服控制系统中,精确检测转台位置和速度对实现恒星,卫星稳定跟踪非常重要,常规的增量式编码器难以满足跟踪精度要求。鉴于此,选用一种高精度的钢环反射式光栅编码器(RESM20USA413),且与ARM处理器的接口电路简单,对编码器输出信号进行了光学细分,滤波处理,并对系统进行了跟踪测试。实验结果表明:采用RESM20USA413作为直驱转台伺服系统的编码器,方位,俯仰轴的跟踪精度均在5″以下,满足系统的跟踪要求。
转台;伺服系统;跟踪精度;ARM;光栅编码器;
大型望远镜转台伺服跟踪系统中,常需要用到高精度增量式光电编码器作为伺服系统检测部件。这些系统通常采用双闭环控制的方法,其中速度检测精度和速度平稳性是实现高精度跟踪的关键条件[1]。脉冲编码器具有良好的性能,以信号的原理来分,有绝对式编码器和增量式编码器两种[2]。其中增量式编码器主要应用于测速,测移动角度,测转动方向,测相对距离等,它具有响应快,成本低,结构简单等优点;绝对式光栅编码器同增量式相比,具有固定零点,无需找参考点,每个码都对应一个位置,掉电无需记忆,但是由于制造成本太高,不易于小型化[3]。所以,增量式编码器可以作为性价比相对高的器件,已经在望远镜转台伺服系统得到了很多应用。
实验室构建的望远镜转台伺服控制系统,采用钢环反射式光栅编码器,输出的脉冲信号经过调理电路可直接接入嵌入式处理器STM32F407IGT6。但是由于常规的增量式编码器难以满足高精度跟踪的要求,因此,本系统选择一种高精度钢环反射式光栅编码器RESM20USA413,其具有稳定可靠,高精度和高分辨率等特点,用于测量望远镜转台伺服系统的位置和转速,伺服控制器和编码器之间接口电路简单,能够获得较好的跟踪性能。
1 增量式编码器工作原理
增量式编码器A,B相时序图如图1所示,增量式编码器是一种将旋转位移转换为与之对应的电脉冲信号的角度传感器,主要由光栅盘和光电检测装置组成。有一个中心有轴的光电码盘,其上有环形通,暗的刻线,有光电二极管发射和接收器读取,获得两组方波脉冲信号组合成A,B两相。增量式编码器按其信号的输出可分为非差分式和差分式,它们的输出均为脉冲信号,非差分信号的输出一般为A,B两相,而差分式信号的输出一般有A相,A非相,B相,B非相。对于差分式的编码器来说,其A,B两相的波形完全相同,仅存在90°的相位差,相对于一个周波360°,将A相信号反向输出A非相,叠加在A相上,可增强信号的稳定性,B相信号也同样;另每转一圈都会输出一个Z相脉冲,此脉冲可代表零位参考位,可用于起始上电标识望远镜的初始位置[2]。一般地平式望远镜两轴都采取自动过零位设计,使望远镜可以方便寻找编码器的零点,通过设定零点偏置值,自动建立望远镜的坐标基准。
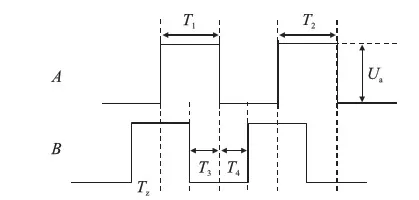
图1 增量式编码器A,B相时序图
由于A、B两相输出信号相位上相差90°,通过这两相正交脉冲信号的状态变化,就能确定出电机转子的旋转方向[4]。通常脉冲数量的增加或减少以及旋转方向的判断,需借助于编码器接口电路的处理器的寄存器判断和计数器来实现,其计数的起始位置可以任意设置[5]。
2 钢环反射式光栅编码器
选用的英国RENISHAW公司的钢环反射式光栅编码器(RESM20USA413),光学直径为413 mm,光栅栅距L为20 μm,分辨率为8.25 μrad(40″)。配套的读数头SR030,是用来读取光栅编码器的脉冲,其防护等级为IP40,供电电源(4.5±5%)V,最大电流为210 mA。在望远镜转台伺服控制系统的跟踪精度一般都在5″以下,且钢环反射式光栅编码器刻线有限,原始输出信号的分辨率达不到系统的要求,可见光栅编码器在不细分的情况下很难满足系统的跟踪精度[6]。实验室采用光学细分的方法,选用了SI0200细分卡,可将分辨率提高200倍,有利于提高伺服系统检测精度[7]。RESM20USA413/SR030/SI0200实物图如图2所示。

图2 RESM20USA413/SR030/SI0200实物图
3 脉冲输出信号处理电路
实际应用中,不管系统是使用绝对式光栅还是增量式光栅,要达到高精度的跟踪要求,通常都需要对光栅的输出原始正交信号进行细分并对其整形[8]。在强电磁干扰或设备振动的情况下,输出脉冲信号可能存在抖动,这对伺服系统的跟踪有一定的影响,严重的情况是跟踪不到目标,所以对编码器输出的脉冲信号进行处理具有很重要的现实意义[9]。
RESM20USA413/SR030/SI0200构成钢环反射式光栅编码器系统,读数头输出信号为差分脉冲信号,再通过细分卡后输出的信号为两路相位差90°的脉冲信号,输出的脉冲信号会有一些毛刺,信号比较弱的情况可能会出现丢脉冲或失真的情况[10]。为了加强输出信号的可靠性,采用将输出信号通过施密特反相器74LS14,并对电路进行低通滤波,其波形改善电路图如图3所示。74LS14各路的逻辑功能是一个反相器,其具有温度补偿功能,可被极平缓的斜坡信号触发,并且依然输出清晰无抖动的信号。
改善后信号再通过具有三态输出的四路差动线路收发器MC3486转换为处理器接收的TTL电平,利用STM32具有DSP功能的单片机内部集成的正交编码器电路的功能,通过软件配置对输入信号的上升沿和下降沿进行计数,并将16位编码器计数器扩充为32位计数器。图4为差分驱动器和处理器接口电路,图中PA8,PA9引脚是STM32处理器正交编码器引脚输入口,PD2作为外部中断引脚,可用来望远镜起始上电时寻找机械零位。

图3 74LS14波形改善电路

图4 差分驱动电路图
4 在直驱转台伺服系统的应用
图5为直驱转台伺服控制系统实验框架图,方位轴,俯仰轴两套控制系统完全相同,机械结构图采用力矩电机直接驱动旋转轴系的结构形式,没有了传统的减速机构,避免机械系统产生回转间隙误差,在两轴安装高精度的钢环反射式光栅编码器反馈旋转轴系的位置信息。
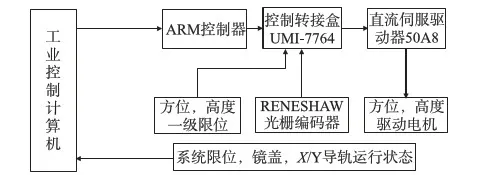
图5 直驱转台为伺服控制系统实验框架图
钢环反射式光栅编码器将转台角度的变化转换成正交方波脉冲进行增减计数[11]。其输出的信号需满足实时性要求,在一个采样周期内需要完成位置和速度数字采样,计算和传输,伺服系统对位置和速度的采样频率常采用500 Hz~1 000 Hz。为了对钢环反射式光栅编码器在望远镜转台伺服控制系统中的跟踪性能进行测试,需设计一种基于ARM处理器的伺服电机数字控制测试系统。
数字采集电路采用ST公司推出的Cortex-M4内核ARM芯片STM32F407IGT6,该芯片具有浮点运算能力和高性能的数字信号处理能力,定时器最高时钟频率达到168 MHz;每个定时器具有4个独立通道,可作为输出比较,输入捕获,单脉冲模式输出和PWM生成的应用,为编码器输出信号的采集提供了方便[12]。
系统采用位置式PID控制算法以及速度外环和电流内环控制结构。伺服驱动AMD模块与下位机PWM输出接口相连,由STM32F407IGT6通过脉冲脉宽调制方式驱动伺服力矩电机,利用调节占空比的方法来调节转台的转速,保证速度的平稳性,再通过位置式PID算法,对参数进行整定来减少系统的跟踪误差。利用星图驱动程序获取目标的理论坐标,每1 ms采集钢带码盘的值,得到当前转台的位置反馈,反馈得到的值与目标的理论值进行比较,并利用位置PID调节器,输出的值作为速度的给定值,ARM每500 μs对编码器脉冲进行采集,得到当前转台的速度反馈。在ARM芯片中,反馈得到的速度与给定的速度进行比较,并利用速度PID调节器,调节当前ARM芯片输出的PWM波的频率,其输出作为驱动器电流内环的给定值,内部50 A8驱动器根据需要自动调节转矩输出来驱动伺服力矩电机,完成对力矩电机的速度调节,保证速度的平稳性[13]。上述控制过程中,由编码器获取的位置和速度信息非常重要,如果钢带码盘信号偏差较大,会对速度的调节影响很大。
伺服控制系统要求的调速范围0.008~4.000 °/s,速度环的采样频率为1 000 Hz,即每1 ms取一次速度信息。所用编码器是RENISHAW钢环反射式光栅编码器,旋转一周的脉冲数是64 800,经细分盒200细分,再加上处理器4倍频后实际的脉冲数p=64 800×200×4=51 840 000。
参考闸门取1 000 Hz的高电平阶段,即0.5 ms即可。理论上可测得的最低转速大约为:360/51 840 000×0.000 5=0.003 47°,满足系统提出的最低转速要求。
以最高转速4 °/s旋转时,2 ms内最大编码器输出脉冲数:0.002×51 840 000×4/360=1 152,所以选用16位计数器作为转速脉冲计数器可满足要求。
ARM采用STM32F407IGT6,由编码器RESM20USA413获取直流力矩电机的转速信息,输出A,B,Z三路信号,其安装在电机的末端,通过对钢带码盘输出信号进行细分和电路的调理后进入STM32F407IGT6正交编码器接口,再通过软件配置进行4倍细分和辨向计数,计算出转台实际的转角位置[14]。通过细分和倍频后,钢环反射镜光栅编码器的角度分辨率为:
同时,对伺服电机的电枢电流进行内环反馈,以及将码盘的值反馈给ARM处理器,对伺服电机进行实时控制。上位机通过网口对ARM进行控制,如方位,俯仰轴转停,轨道的跟踪,以及轴系状态的监视等。
5 实验结果与分析
基于实验室现有的平台构成的基于高精度增量式编码器的直驱转台伺服系统。为减少钢带码盘信号偏差影响系统的跟踪精度,在每轴安装两个读数头,对称安装。为了更好地测试系统的跟踪性能,分别在电机转速为2 °/s,180°正弦波对方位,俯仰两轴的跟踪误差进行测试,如图6~图9所示。
图6、图7所示为速度是2 °/s时,方位,俯仰的跟踪误差曲线图,其RMS分别为3.45″,2.47″。图8、图9为速度是180°正弦波时,方位,俯仰的跟踪误差曲线图,其RMS分别为4.13″,2.87″。由图6~图9中数据得知,俯仰比方位的跟踪性能好,由于转台一周的每个位置的机械特性不一样,跟踪过程中偶然会出现比较大的跳点,方位,俯仰两轴跟踪精度均在5″内,满足伺服系统的跟踪要求。
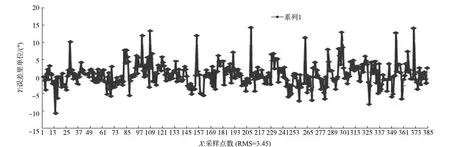
图6 方位轴2 °/s跟踪误差曲线图
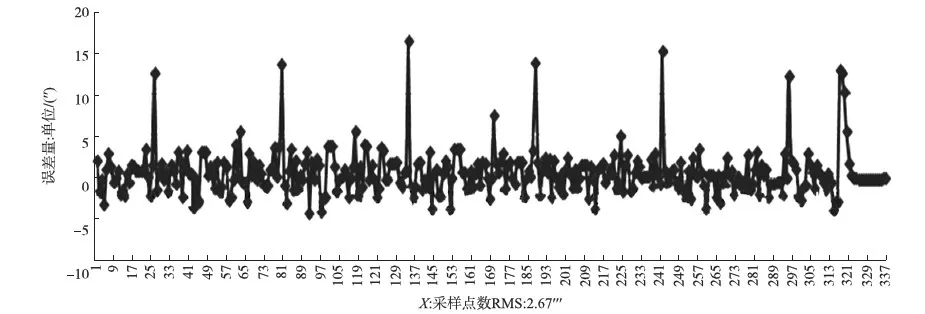
图7 俯仰轴2 °/s跟踪误差曲线图
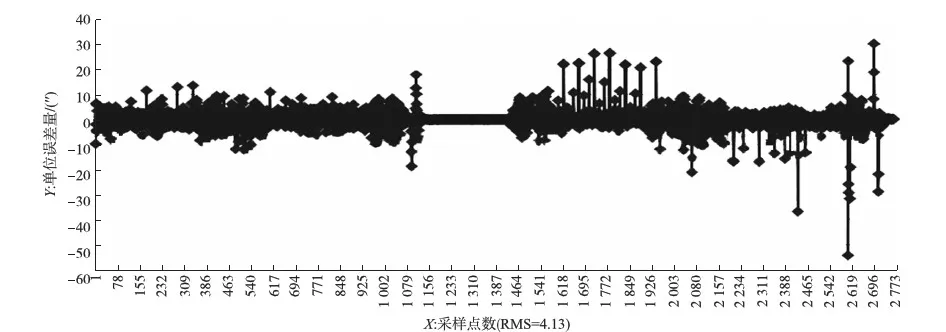
图8 方位正弦180°跟踪误差曲线图
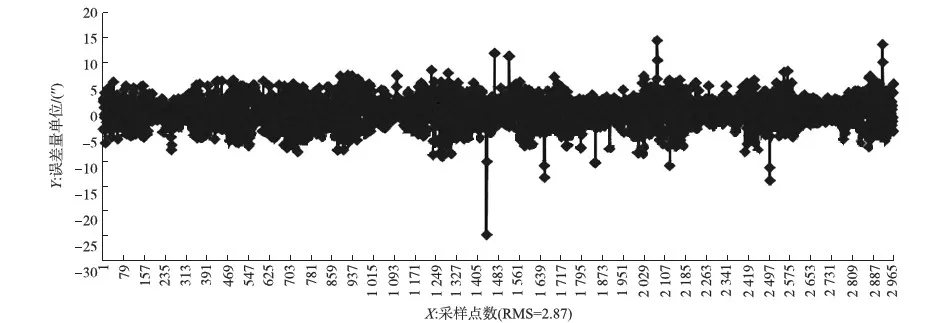
图9 俯仰正弦180°跟踪误差曲线图
6 结语
本文对钢环反射式光栅编码器RESM20USA413的工作原理进行了论述,并对编码器输出信号进行了滤波处理以及对钢环反射式编码器在转台伺服控制系统的应用进行了系统测试实验。进行了RESM20USA413/SR030/SI0200钢环反射式光栅编码器系统和嵌入式ARM处理器正交编码器接口电路的设计,通过跟踪目标对伺服系统跟踪精度进行了实验测量,并对实验结果出现的现象进行了分析。实验结果表明:钢环反射式光栅编码器具有高精度,高分辨率,抗干扰能性能强等优点,可以提高望远镜转台伺服控制系统的跟踪精度。
[1] 文晓燕,郑琼林,韦克康,等. 增量式编码器测速的典型问题分析及应对策略[J]. 电工技术学报,2012,27(2):185-189.
[2] 舒志兵,周玮,李运华. 交流伺服运动控制系统[M]. 北京:清华大学出版社,2008:33-42.
[3] 时魁,高云国,赵勇志,等. 增量式光栅编码器与绝对式编码器性能比较和分析[J]. 机械设计与制造,2011,1(1):96-97.
[4] 顾卫钢. 手把手教你学DSP—基于TMS320X281x[M]. 北京:北京航空航天大学出版社,2011:266-269.
[5] 胡书举,李建林,王剑飞,等. 一种高精度增量式编码器在直驱风力发电系统中的应用[J]. 电机与控制应用,2008,35(4):6-9.
[6] 杨孟,徐卫明,肖林,等. 增量式光栅编码器在激光扫描雷达的应用研究[J]. 传感器与微系统,2012,31(3):36-38.
[7] 宋刚,张蕾,胡德金. 基于普通编码器的高精度位置检测方法[J]. 上海交通大学学报,2003,37(5):699-702.
[8] 刘浩,冯济琴,陈自然. 基于预测理论的光栅信号精密细分方法研究[J]. 传感技术学报,2015,8(4):169-474.
[9] 吴禄慎,熊辉,高项清. 基于单片机的增量式编码器计数系统[J]. 仪表技术与传感器,2013(9):44-46.
[10] 王兴,贾晓虎,郝春丽. 基于增量式光电编码器位移传感器研究[J]. 电子设计工程,2012,20(5):155-157.
[11] 岳振,顾海峰,李范鸣. 一种编码器实时读出电路设计及处理方法[J]. 科学技术与工程,2013,3(20):5954-5958.
[12] 刘波文,孙岩. 嵌入式实时操作系统μC/OS-II经典实例—基于STM32处理器[M]. 北京:北京航空航天大学出版社,2014:8-11.
[13] 杜颖财,王希军,王树洁,等. 增量式编码器自动检测系统[J]. 电子测量与仪器学报,2012,26(11):993-995.
[14] 徐洋,余辉,黄敬贵. 基于STM32单片机的增量式编码器模拟装置设计[J]. 工业控制计算机,2015(5):59-61.
Application of Steel Ring Reflective Grating Encoder in Turntable Servo System*
ZHAO Jinbiao1,2,ZHU Qingsheng2,3*,ZHOU Xiaojun2,3,LI Jinpeng2,3
(1.University of Chinese Academy of Sciences,Beijing 100049,China;2.Nanjing Astronomical-Instrument Research Center of Chinese Academy of Sciences,Nanjing 210042,China;3.Nanjing CAS Corporation Limited of Astronomical Instruments,Nanjing 210042,China)
It is very important for the stability of the fixed star and satellite to accurately detect the turntable position and speed in the servo control system of the telescope turntable. The conventional incremental encoder is difficult to meet the requirement of tracking accuracy. In view of this,a kind of high precision steel ring reflective grating encoder(RESM20USA413)is adopted,which has a simple interface circuit with the ARM processor. Then the output signal of the encoder is optical subdivision and filtered.The tracking system is tested. The experimental results show that using RESM20USA413 as a direct drive turntable servo system encoder,the tracking accuracy of the azimuth and pitch axis is in the following 5 second of arc. It meets the requirements of the servo system.
turntable;servo system;tracking precision;ARM;grating encoder
赵金标(1989-),男,江苏盐城人,硕士研究生,现从事精密仪器自动控制的研究,18761605658@163.com;

朱庆生(1969-),男,江苏连云港人,研究员,硕士生导师,主要从事天文仪器计算机自动控制技术的研究。
项目来源:基础研究计划项目(自然科学基金)—青年基金项目(BK20160154)
2016-10-19 修改日期:2016-12-29
TP212
A
1004-1699(2017)05-0801-06
C:7230
10.3969/j.issn.1004-1699.2017.05.028
