分布式光纤振动传感系统的多级零频点定位研究*
2017-05-24吴瑞东谭晋隆靳宝全
王 宇,吴瑞东,王 东,谭晋隆,刘 昕,靳宝全*
(1.太原理工大学新型传感器与智能控制教育部与山西省重点实验室,太原 030024;2.山西煤层气(天然气)集输有限公司,太原 030032)
分布式光纤振动传感系统的多级零频点定位研究*
王 宇1,吴瑞东1,王 东1,谭晋隆2,刘 昕1,靳宝全1*
(1.太原理工大学新型传感器与智能控制教育部与山西省重点实验室,太原 030024;2.山西煤层气(天然气)集输有限公司,太原 030032)
为了减少直线结构Sagnac分布式光纤传感系统的定位误差,提出一种多级零频点的优化方法,通过分析直线结构Sagnac分布式光纤传感定位原理,确定固定的采样速率下离散化是造成定位误差大的原因。并分析得出振动信号频域曲线会周期出现多个零频点,进而对振动定位的多级零频点优化方法进行了理论推导,阐明高倍零频点下的定位误差会有效减小。通过实验验证表明,在总长为11.769 km的传感光纤上,优化后的定位方法在不改变采样速率下可保证定位误差提升到±20 m范围内,可以基本满足系统对外界振动信号进行精确定位的要求。
光纤传感;Sagnac;振动检测;零频点
分布式光纤传感技术在近几年中得到了飞速的发展,因其具有耐腐蚀、抗电磁干扰、造价成本低、检测灵敏度高等特性,被广泛应用于工业自动化和系统监测中[1-4]。其中振动检测系统主要分为相位敏感光时域反射技术(Ф-OTDR)和干涉技术。在基于Ф-OTDR的分布式光纤振动检测系统中,通常采用高成本的窄线宽激光器作为光源,在脉冲光的作用下探测光的后向散射变化实现对振动的检测与定位,由于光的后向散射比较微弱,因此需要对信号进行放大[5]。基于干涉技术的振动检测系统具有搭建成本低,检测灵敏度高等优点,得到了越来越多的关注,常用的干涉技术有萨格奈克(Sagnac)、迈克尔逊(Michelson)、马赫泽德(Mach-Zehnder)及其混合型干涉技术。近年来干涉系统中对定位技术的研究得到了越来越多的关注,其中有基于Mach-Zehnder的三芯传感结构、基于时间延迟估计的双向Sagnac分布式光纤传感定位以及基于Sagnac和Michelson的复合型传感结构[6-8]。其中采用Sagnac与Mach-Zehnder复合型的传感光路,将传统的环形Sagnac结构改进为直线型,使得系统更具实用性[9-10]。在该传感系统中常采用如下定位方法,当外界振动为宽频谱振动类型,时域信号经傅里叶变换后得到频域曲线,其中在频域存在周期性的极小值点,且周期的大小与振动位置有关,这些极小值点称为零频点。故传统的定位算法常采用寻找频域信号中第1个零频点对应的频率值的方法,并通过公式计算出振动位置[11]。文献[12-13]在此基础上提出一种新型的定位算法,通过对频域曲线进行二次傅里叶变换,根据零频点的周期特性,将这一特性转化为二次傅里叶变换结果的单个极大值点,更加便于特征提取和振动定位,该算法在针对单点与多点的振动问题上提出了一种解决方法。以上基于直线结构Sagnac的分布式光纤传感系统中对于振动的定位大多采用频域曲线中第1个零频点,对于后续零频点还有待进一步的研究。采用二次傅里叶变换的定位方法需要系统工作在高采样率条件下,通过增加采样点数的方式来保证定位精度,要求数据处理单元具有较高的处理速度,从而保障系统的实时性。
针对以上存在的问题,为了提高直线型Sagnac分布式光纤传感系统中定位精度,本文分析直线型Sagnac定位原理,根据定位原理,分析单点振动条件下优化定位结果的可行性,采取合适的后续零频点进行定位优化设计。依据该方法进行实验验证,得到合理使用后续零频点能够提高定位精确度和减少定位误差的结论。
1 振动定位优化设计原理
1.1 振动定位原理
直线结构Sagnac分布式光纤传感系统是将Sagnac和Mach-Zehnder结合在一起,传感系统结构如图1所示[8-9]。
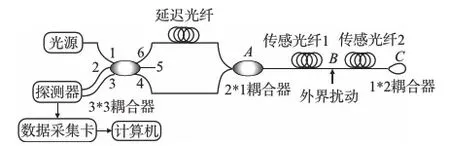
图1 直线结构Sagnac传感系统结构图
图1中直线结构Sagnac传感系统包含有宽带ASE光源、3*3耦合器、延迟光纤、2*1耦合器、传感光纤、1*2耦合器、光电探测器、数据采集卡和计算机。光电探测器将探测到的光强变化转化为模拟电信号,数据采集卡将A/D转换结果输送至计算机进行数据分析与处理。对图1中所示直线型Sagnac传感系统结构分析可知,形成光路如下[11]:①光路1:6—延迟光纤—A—C—A—延迟光纤—6;②光路2:6—延迟光纤—A—C—A—4;③光路3:4—A—C—A—延迟光纤—6;④光路4:4—A—C—A—4。
在以上4个光路中,光路1长度最长,光路2与光路3长度相等,光路4长度最短。因此只有光路2和光路3满足干涉条件,能够在耦合器处发生干涉。通过平衡探测器所探测到的光强变化,即为光路2与光路3干涉后的光强变化。
当外界没有振动作用于传感光纤,光路2与光路3中光相位差为固定相位差,则干涉后的光强为固定值。当有振动作用于传感光纤,由于应变效应、光弹效应和泊松效应,引起光纤中振动位置处的光相位发生变化。经傅里叶级数展开,所引起的相位变化可用不同幅值、频率和相位的正弦波表示[14]:
(1)
式中:y(t)表示在时间条件下所引起的相位变化;Ai为正弦波所对应的幅值大小;ωi为正弦波对应的频率;φi为正弦波的初始相位;t为振动持续时间;N为正整数,表示构成振动所需要的正弦波的数目。由式(1)可知,振动所引起光路二和光路三的相位变化分别表示为:
(2)
(3)
式(2)表示振动对光路二的相位变化,式(3)表示振动对光路三的相位变化。设图1中所用的延迟光纤长度为Ld,振动位置B距离2*1耦合器A长度为L1,距离光纤末端1*2耦合器C长度为L2,传感光纤总长度为L。若真空中光速为c,光纤折射率为n,则式(2)和式(3)中未知量满足如下关系式:
(4)
由三角函数和差化积公式,并将式(4)代入式(2)和式(3),得到振动所引起光路二和光路三的相位差表达式:
(5)
式中:若外界的振动频率f满足式(6)条件,则Δy(t)大小为零,即探测光强大小出现极小值,对应前文所述的零频点。
(6)
式中:k为正整数,c为光在真空中的传播速度,n为光纤的有效折射率,L2为振动位置距离光纤末端的长度,且f大小呈现出奇数倍(2k-1)的等差排列关系。
由以上数学分析可知,在理想条件下,外界振动能够改变形成干涉的两束光相位差,经耦合器转换为光强变化,对时域探测结果进行傅里叶变换得到频域曲线,随频率的不断增大,所对应幅值出现与振动位置有关的零频点。因此,如果能够找到零频点,以及所对应的频率值f,即可求出振动的位置,实现对振动的定位[9-11]。
1.2 振动定位优化原理
设第N零频点对应频率值用fN来表示,在传统直线结构Sagnac分布式光纤振动传感系统中,由于采集到的离散光强变化信号的频域曲线同样为离散信号,设零频点对应频率值f的离散化误差为ε,且ε远小于整个频率区间的大小,因此设每个零频点对应的离散化误差均为ε,则在式(6)中k=1时,振动定位距离为:
(7)
以及在任意正整数k=m条件下对应振动定位距离:
(8)
已知第N零频点的频率值fN与第1个零频点的频率值f1满足如下关系:
fN=(2k-1)f1
(9)
则式(8)中与实际振动位置误差大小的表达式为:
(10)
同理推导可得在k=m+1下的定位误差:
(11)
将式(10)的平方与式(11)的平方相减得出定位误差的比较结果:
(12)
式中:令
(13)
则ΔLe=A2BC,其中A2≥0、B>0、C≤0,因此ΔLe≤0,即第m+1项定位误差小于等于第m项定位误差,当且仅当ε=0时等号成立。
综上所述,当存在多个零频点时,使用第N零频点进行外界振动定位(N>1),并将满足此条件的零频点称为高倍零频点,则高倍零频点的定位结果要优于第1个零频点的定位结果,从而实现对外界振动定位的优化设计。

图2 直线结构Sagnac传感系统实物图
2 振动定位优化设计的实验验证
依照图1所示搭建分布式光纤传感系统实物图,如图2所示。经光时域反射仪测量得传感光纤总长度为11.769km,在实验过程中,选用一段传感光纤缠绕在圆筒形压电陶瓷表面,由信号发生器输出固定频率的高压压电陶瓷驱动脉冲,用于模拟外界振动对光纤的扰动作用。计算机系统控制数据采集卡采集数据,并实时对数据进行在线快速傅里叶变换,寻找频域曲线中的多个零频点。
当在距光纤末端11.769km处施加重复频率为100Hz的周期性冲击信号时,光电探测器探测到时域曲线如图3所示。对图3分析可知,光纤传感系统能够检测到周期性脉冲信号,且单个冲击信号下幅值信噪比为48.9dB。冲击信号周期约为10ms,对应100Hz的重复频率,与信号发生器产生的驱动信号频率相一致。因此,实验结果表明传感系统可对外界振动信号进行实时检测。
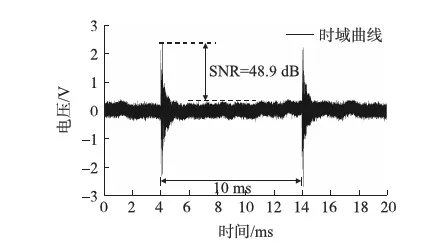
图3 周期性冲击信号下探测结果
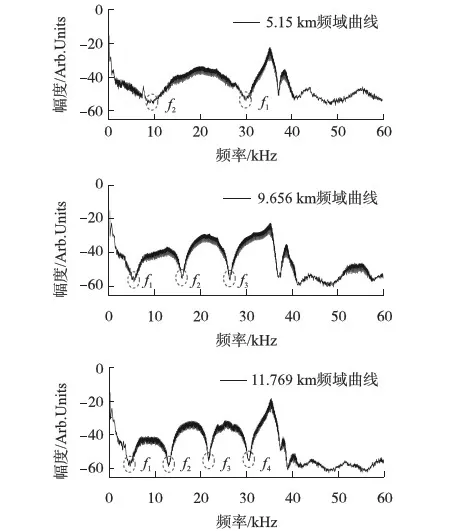
图4 周期性冲击信号下频域曲线
在不同位置施加振动,探测时域干涉结果并傅里叶变换至频域。图4为距光纤末端5.15km、9.656km和11.769km处冲击信号的频谱曲线,为便于观察到频域中的多级零频点现象,将频域中横坐标频率范围选取在0~60kHz之间。可以得到频域曲线中呈现多个周期性零频点(f1、f2、f3与f4),且零频点对应频率值近似为奇数倍等差排列关系,且随着振动位置的增加,第1个零频点频率值逐渐减小,相邻零频点频率差值逐渐减小,与式(6)结果相一致,同时可以观察到零频点的个数为有限多个。
提取图4中不同位置零频点的频率值,并与理论曲线对比得到图5结果。由图5可知,不同振动位置零频点的实际频率值与理论频率值相近,且零频点的频率值能够反映出当前振动位置,表明采用零频点频率值进行振动定位方案具备可行性。
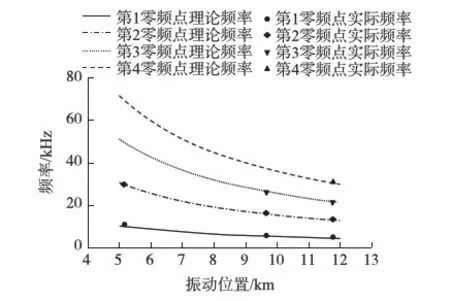
图5 零频点理论频率与实际频率对比结果
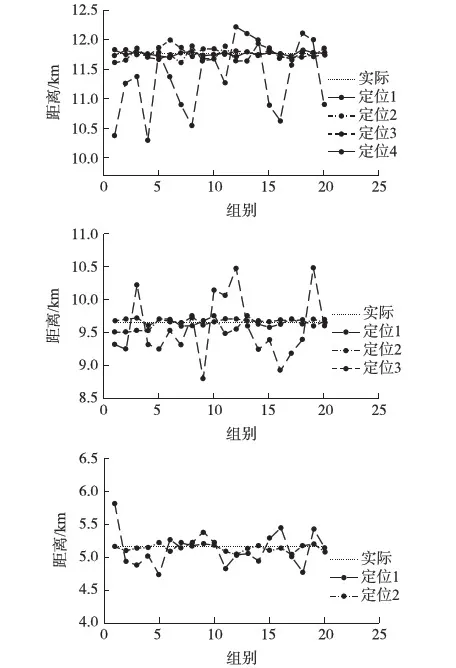
图6 定位分布折线图
分别施加相同的振动信号,均观测到类似的多个零频点现象。通过查找频率区间内幅值最低点频率值,利用式(6)定位振动位置。在不同位置处进行重复性实验,并分别记录不同零频点下的20组定位结果。如图6所示,分别为在5.15km、9.656km和11.769km处不同零频点下振动定位分布折线图。
为表明定位实验结果的优劣性,计算图6中20组定位结果的算术平均值,结果如表1所示。得出随着振动施加位置与光纤末端距离的增加,第1个零频点的定位误差也随之增大,在同一振动位置,高倍零频点的定位误差要明显小于第1个零频点的定位误差,并且选择使用高倍零频点进行定位,在5.15km处零频点2定位误差为-20.693m,在9.656km处零频点3定位误差为16.670m,在11.769km处零频点4定位误差为-1.923m,测试结果表明优化后的定位误差能够保持在±20m范围内。
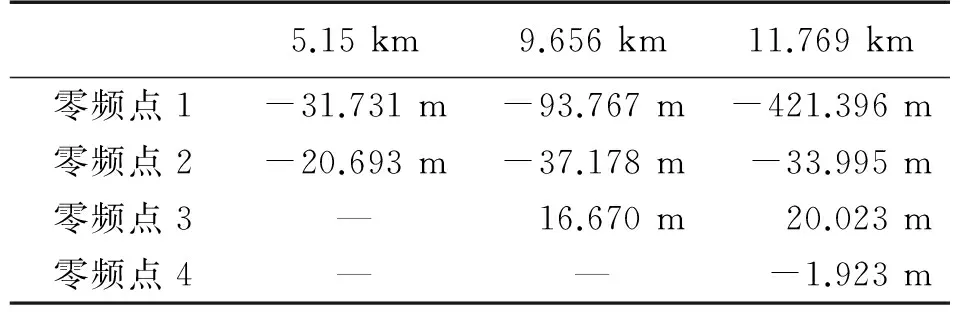
表1 不同零频点对应的定位误差
同样计算图6中20组定位实验结果的标准差,用于表明图6中曲线总体分布的收敛特性,结果如表2所示。由表2可知,在同一振动位置处,高倍零频点定位的收敛特性要优于第1个零频点,因此高倍零频点具有更好的定位稳定性。
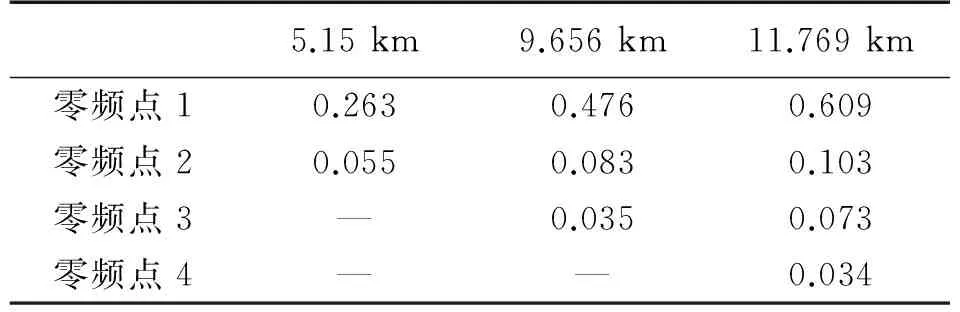
表2 不同零频点对应的标准差
3 结论
本文介绍了直线结构Sagnac分布式光纤传感系统对外界振动进行定位的原理,并对分布式光纤振动传感系统中的单点振动定位问题开展多级零频点优化研究。实验结果表明,当频域曲线中存在多个零频点时,高倍零频点的平均定位误差要比第1个零频点的平均定位误差小,同时高倍零频点的定位稳定性要优于第1个零频点,并且具有更好的收敛特性。此外,利用多级零频点优化方法,振动传感系统可在总长为11.769 km的传感光纤上实现±20 m的定位误差,从而基本满足了各类型长距离振动定位应用领域对外界振动进行精确定位的需求。
[1] 单亚锋,马艳娟,付华,等. 分布式光纤测温系统在煤矿火灾监测中的应用[J]. 传感技术学报,2014,27(5):704-708.
[2] 毛江鸿,崔磊,何勇,等. 基于分布式光纤的钢筋混凝土锈胀开裂监测试验研究[J]. 传感技术学报,2014,27(8):1147-1153.
[3] 何存富,阮力,冯欢,等. 基于3×3耦合器的环型Sagnac干涉仪管道监测系统实验研究[J]. 光电子·激光,2015(6):1125-1131.
[4] 黄新锐,王广祯,侍海峰,等. 分布式光纤振动传感系统大传感数据流时间周期压缩与传送技术[J]. 传感技术学报,2015,28(10):1442-1447.
[5] 谢孔利. 基于φ-OTDR的分布式光纤传感系统[D]. 北京:电子科技大学,2008.
[6] Liang S,Sheng X,Lou S,et al. Novel Lissajous Figure Based Location Method for Fiber-Optic Distributed Disturbance Sensor[J]. Optik,2015,126(23):4362-4366.
[7] 许海燕,徐锲,肖倩,等. 基于时延估计的分布式光纤传感定位[J]. 光学学报,2010(6):1603-1607.
[8] Mohanan B,Shaija P J,Varghese S. Studies on Merged Sagnac-Michelson Interferometer for Detecting Phase Sensitive Events on Fiber Optic Cables[C]//2013 International Multi-Conference on Automation,Computing,Communication,Control and Compressed Sensing(iMac4s),IEEE,2013:84-89.
[9] 杭利军,何存富,吴斌. 基于Sagnac光纤干涉仪的管道泄漏检测和定位技术[J]. 光学技术,2007,33(5):651-653.
[10] 杭利军,何存富,吴斌. 一种新的直线型Sagnac光纤干涉仪管道泄漏检测系统及其定位技术[J]. 中国激光,2007,34(6):820-824.
[11] 韩玲娟,王强,杨其华,等. 基于分布式光纤传感的水下输气管道泄漏检测与定位分析[J]. 传感技术学报,2015,28(7):1097-1102.
[12] Wang H,Sun Q,Li X,et al. Multi-Point Location Algorithm for Distributed Optical Fiber Disturbances Detection System[C]//Asia Pacific Optical Sensors Conference 2013. International Society for Optics and Photonics,2013:892417-892417-4.
[13] He W,Qizhen S,Xiaolei L,et al. Improved Location Algorithm for Multiple Intrusions in DISTRIBUTED SAGNAC FIBER SENSING SYStem.[J]. Optics Express,2014,22(7):7587-7597.
[14] 许海燕. 分布式光纤振动传感器及其定位技术研究[D]. 上海:复旦大学,2011.
Study on Multiple Null Frequency Location of Distributed Optical Fiber Vibration Sensing System*
WANG Yu1,WU Ruidong1,WANG Dong1,TAN Jinlong2,LIU Xin1,JIN Baoquan1*
(1.Key Laboratory of Advanced Transducers and Intelligent Control Systems,Ministry of Education and Shanxi Province,Taiyuan University of Technology,Taiyuan 030024,China;2. Shanxi CBM(NG)Gathering and Transportation Co.,Ltd.,Taiyuan 030032,China)
A novel optimization method of multiple null frequency is proposed,in order to reduce the locating error of linear Sagnac distributed optical fiber vibration sensing system. The traditional locating method is firstly introduced. By analyzing the phenomenon of multiple null frequency,the reasons for the increase of positioning error are explained. The optimization method of multiple null frequency is theoretically presented and experimentally verified. The experiment result shows that the locating error is within the range of ±20 m over a total fiber length of 11.769 km,which can meet the need of accurate vibration location.
optical fiber sensing;Sagnac;vibration detection;null frequency

王 宇(1986-),男,山西忻州人,讲师,博士,研究方向为振动检测与光纤传感技术,wangyu@tyut.edu.cn;

靳宝全(1972-),通讯作者,男,山西代县人,教授,博士,研究方向为新型传感器,jinbaoquan@tyut.edu.cn。
项目来源:国家自然科学基金项目(51375327);山西省回国留学人员科研项目(2016-035);山西省煤基重点科技攻关项目(MQ2014-09)
2016-10-06 修改日期:2017-01-09
TP212
A
1004-1699(2017)05-0655-05
C:7230E
10.3969/j.issn.1004-1699.2017.05.004
