基于MIMU的输电线路运动监测技术*
2017-05-24杨金显王鹏飞罗宇锋李双磊
杨金显,王鹏飞,罗宇锋,杨 闯,李双磊
(1.河南理工大学电气与自动化学院,河南 焦作 454003;2.国网山东临朐县供电公司,山东 临朐 262600)
基于MIMU的输电线路运动监测技术*
杨金显1*,王鹏飞1,罗宇锋1,杨 闯1,李双磊2
(1.河南理工大学电气与自动化学院,河南 焦作 454003;2.国网山东临朐县供电公司,山东 临朐 262600)
在分析当前输电线运动监测技术优缺点的基础上,提出一种基于MIMU的输电线路运动监测技术。采集MIMU时间序列信号建立ARMA模型,对比力和角速度信号进行Kalman滤波处理;由于平动和转动的幅值是由比力和角速度积分所得,以各轴比力平方和与角速度平方作为衡量输电线平动和转动幅度的标准,并对数据进行分段,通过计算数据段间的欧式相似度衡量数据的变异程度来评估输电线平动和转动的幅度及变化趋势,对测得加速度和角速度做FFT变换得出运动频率。为验证运动监测技术,设计转台摇摆模拟输电线3种不同幅值运动,将数据进行上述算法处理,结果表明,估计出的平动和转动幅度趋势和幅值变化相同,且精确识别施加的频率为2Hz。实验室条件下,搭建的模拟系统正常工作。
MIMU;输电线;运动监测;时间序列模型;相似度
输电线路运动监测是智能电网建设的关键技术之一,由于自然环境的影响,输电线在一定的气象条件下出现运动现象。输电线运动主要包括微风振动、次档距振荡和覆冰舞动。微风振动高频(约3 Hz~150 Hz)微幅(一般不超过导线直径),次档距振荡中频(约1 Hz~3 Hz)中幅(0.1 m~0.5 m),覆冰舞动低频(约0.1 Hz~3 Hz)大振幅(约为导线直径的5倍~300倍)[1]。这3种形式的运动给输电线路带来了很多危害,而3种运动本质上属于自激振动。在低频范围内,振动强度与位移(振幅)成正比;在高频范围内,振动次数多,过程短,加速度计的数值及变化量大,振动强度大,故对频率的监测较为重要。综上,在输电线运动中,对幅值和频率两个参数的监测必不可少。同时,所监测的运动数据对后续防舞防振策略的制定提供数据支撑。
近年来,输电线路运动在线监测技术发展迅速,主要有基于加速度计的在线监测[2]和基于惯性测量单元IMU(Inertial Measurement Unit)的在线监测[3-4]。基于加速度计的在线监测法是指将安装在线路上的多个加速度计作为监测装置节点,通过对其进行二次积分还原被测点空间位移变化情况的一种方法。加速度计在实际应用中存在节点布置和随导线扭转等问题。节点布置主要涉及节点数量的选择,安装的节点越多,曲线拟合的精度越高,相应的成本和软件计算量也增大;反之拟合精度降低,运动轨迹估算不准确。加速度计随导线发生扭转时,导致计算出的相对位移与实际运动偏差较大,无法还原出导线的真实运动轨迹。为了解决导线扭转对监测的影响,出现了基于IMU的在线监测法,该监测法与基于加速度计的在线监测法类似,只是将输电线路上安装的加速度计换成了IMU。由于IMU可以同时输出输电线路运动的比力和角速度,因此,它不仅可解算出被测点运动时的位移变化情况,还能获取被测点运动时的扭转情况,较完整的还原输电线路的运动姿态。基于IMU的在线监测虽然避免了监测点随导线扭转对监测精度的影响,但依赖于多个高精度IMU的安装,且通常每档距要安装3个以上的IMU,过多的高精度IMU安装不仅成本较高,还可能对输电线路数学模型造成影响。除此之外,由于陀螺漂移的存在,实际操作中往往存在较大的姿态解算误差。
基于MIMU(Micro Inertial Measurement Unit)的输电线运动监测技术,将低成本的MEMS(Micro Electro Mechanical Systems)惯性器件用作运动监测,以处理后的各轴比力平方和与角速度平方作为衡量输电线平动和转动幅度的标准,将相似度理论[5-7]用于平动和转动幅度的评估,不仅避免了解算误差,而且在实际工程应用中有较大优势。实验验证此技术可准确监测输电线运动状态,适用于输电线运动在线监测。
1 MIMU输电线运动监测系统设计
在现有输电线路监测系统基础上,设计了MIMU输电线运动在线监测系统,实现导线平动和转动幅度估计及运动频率识别。该系统结构如图1所示,系统包括导线运动监测装置CMD(Condition Monitoring Device)、气象传感器、状态监测代理CMA(Condition Monitoring Agent)、状态信息接入网关机CAG(Condition Information Acquisition Gateway)、通信网络等[1]。其中CMA及各类气象传感器安装在杆塔上,气象传感器通过RS485与CMA通讯。CMD安装在导线上,每个待测导线档距间只需在距档端1/8处安装一个,以避开常见舞动半波的节点(节点处运动位移为0)。对CMD进行防磁干扰处理。CMD完成对数据的预处理后将处理后的数据通过光纤通信传输至CMA,CMA通过对监测数据进行既定算法处理得出导线运动状态,结合气象信息做出预警信息,将预警信息和处理后的数据打包通过专用光纤传输通道发给CAG,在CAG的专家软件进行状态显示。
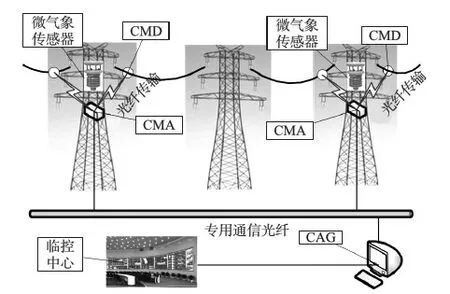
图1 系统总体示意图
CMD和CMA等都采用跳塔安装方式,即每隔一个杆塔安装一套监测装置,可大大降低监测成本,其监测的信息也能根据所设计的算法准确得出输电线运动状态。
系统选用地理坐标系作为导航坐标系,CMD安装坐标系如图2所示,即载体坐标系。载体坐标系与地理坐标系间可由姿态矩阵进行转换。CMD由主控制器、电源模块、惯性传感器和通信模块组成。其中主控制器采用STM32F103C8T6处理器;电源模块采取导线就地取电配合锂电池的方式进行供电;惯性传感器选用集三轴加速度计和陀螺仪为一体的全MEMS惯性器件MPU6050来测量比力和角速度信息。
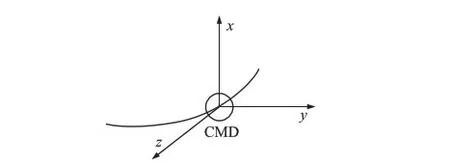
图2 CMD安装坐标系
状态监测代理CMA安装在杆塔中部,由控制器、气象传感器、电源模块和通信模块组成。选用太阳能电池板和蓄电池组合供电;通过光纤接收CMD预处理后的数据,气象传感器通过RS485和CMA通讯;选用ARM内核芯片STM32F103VET6作为控制器。
2 算法设计
对输电线运动的监测,主要关注输电线平动(水平、垂直运动)和扭转运动的幅值与频率。由于输电线运动的复杂性,要实现对输电线运动轨迹的精确还原不仅成本较大,且不免存在解算误差,因此提出的输电线平动及扭转幅度是对输电线整体运动及扭转运动幅值的一个估计量,经过实验标定可以准确反映输电线运动状态:首先对MIMU数据建立时间序列的ARMA模型,并采用Kalman滤波进行信号处理[8-10],以各轴比力平方和作为衡量输电线平动幅度的标准;然后将所得平方和数据进行分段,通过监测数据段间的相似度衡量数据的变异程度,进而进行输电线平动幅度的评估。同理,对角速度平方进行相似度计算评估扭转幅度,对IMU输出的加速度和角速度数据做快速傅里叶变换FFT(Fast Fourier Transformation)得出运动频率[11-12],其算法流程如图3所示。
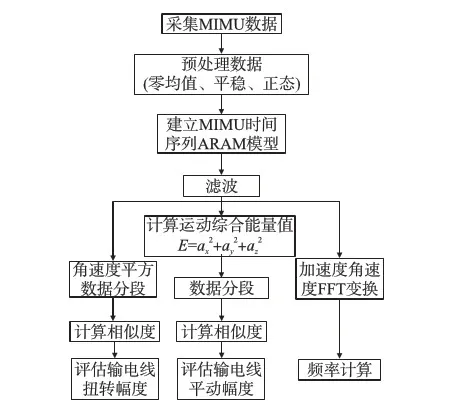
图3 输电线运动监测算法流程
2.1 MIMU数据预处理、建模及滤波
首先采集MIMU数据,由于MIMU系统采集的数据具有高噪声等特点,微惯性器件存在常值偏置、器件温度漂移误差、陀螺仪的漂移等。同时,在对MIMU信号建立时间序列模型时,首先应保证该组信号为零均值、平稳、正态时间序列。常值分量可以通过求均值来提取,去掉常值分量后,该信号应为零均值信号,同时,对信号进行多项式拟合去除趋势项,得到平稳的零均值信号。预处理后的数据具有平稳、正态的零均值等时间序列特性,可建立滑动自回归模型ARMA。依据随机序列自相关系数函数(ACF)和偏相关系数函数(PACF)的“拖尾”和“截尾”性质进行模型辨识。其中ARMA模型特点如表1所示。
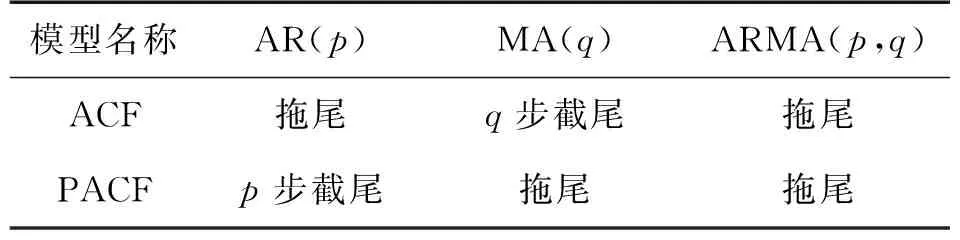
表1 ARMA(p,q)模型特点
对于含N个观测数据的一个时间序列样本x(1),x(2),x(3),…,x(N),其样本均值为:
(1)
样本自协方差函数:
(2)
样本自相关系数函数:
(3)
样本偏自相关系数函数可以通过如下简洁的偏自相关系数函数的递推公式求得:
(4)
xt=a1xt-1+a2xt-2+…+apxt-p+wt
(5)
式中:ai(i=1,2,…,p)为自回归参数;wt为高斯白噪声序列。
(6)
(7)
(8)
针对时间序列建模的缺陷,采用Kalman滤波的最优估计思想,对建立的时间序列数据进行优化。
卡尔曼滤波方程的状态空间模型为:
(9)

设系统的输出为Zk=Xk,则输出方程中的系数为H=[1 0]T,易知:
(10)
2.2 输电线平动幅度评估
输电线运动时水平、垂直、扭转运动同时发生,轨迹截面图是一种不规则或部分不规则椭圆,如图4所示,本文将水平、垂直运动统称平动。
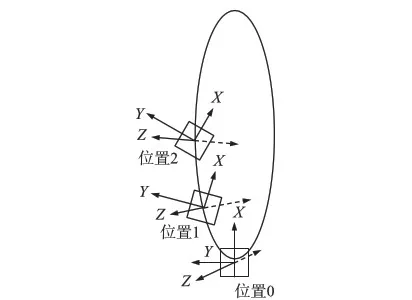
图4 输电线运动截面图
加装在输电线上的CMD可以测得三轴加速度ax,ay,az,由此加速度可得输电线x,y,z三轴速度近似为:
vx=axΔt、vy=ayΔt、vz=azΔt
(11)
设导线质量为M,则导线运动能量可表示为:
(12)
根据以上加速度和速度的线性关系,输电线总的运动能量可用下式来衡量:
(13)
由于各轴比力的大小不仅反映各轴的动能能量,也反映输电线各轴的受力大小,且平动幅值是由加速度积分所得,所以,E反映了某时刻输电线的综合运动幅度。由于输电线水平、垂直运动时还存在扭转运动,比力信息中存有的重力加速度较难分离,可以用E作为估计平动幅度的标准。
用滤波后的加速度数据计算E值,Ei为其中一个长度为n数据序列,将Ei平均分割成长度皆为m的n-m+1段,得到数据矩阵为:
(14)

Dnor=di/dmax+ε
(15)
dmax为出现的最大欧式距离;Dnor∈(0,0.2)说明输电线运动幅度小;Dnor∈(0.3,0.8)说明输电线运动较剧烈;Dnor∈(0.8,1)说明此时输电线运动剧烈,需及时采取相关措施并保存监测数据。
2.3 输电线扭转幅度评估
2.4 输电线运动频率识别
输电线运动本质上是一种周期性的自激振动,监测系统通过连续采样形成连续信号,傅立叶原理表明,任何连续测量的信号或时序,都可以表示为不同频率的正弦波信号的无限叠加。输电线运动的频率范围0.1Hz~150Hz,系统采样频率最高为512Hz,可精确采集舞动特征量。对经去噪得到512个样本进行512点的快速傅里叶变换(FFT),得到512个点的复数序列,每一个复数可以表示信号在某一个频率下的特征,如下式:
fn=(n-1)(fs/N)
(16)式中:fn为信号频率,单位:Hz,n为第n个点,fs为采样频率,单位:Hz,N为FFT变换点数。FFT利用测量到的加速度或角速度信息,分段进行FFT变换,幅值最大处所对应的频率即此段数据所对应的频率。
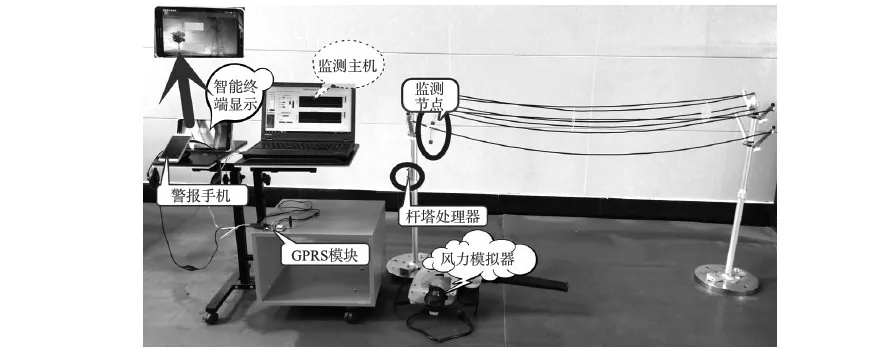
图7 实验平台和监测主机
3 实验验证
3.1 算法验证
将CMD固定在转台边缘,使之做摇摆运动近似模拟输电线运动。令转台进行固定频率为2Hz,转动幅度分别为0.2°、0.5°、1.0°的摇摆运动。采样频率调至50Hz,每种运动取1 024个特征点,将3种运动数据拼接共3 072个特征点,经上述算法处理得出运动能量波形变换和估计出的平动幅度变化如图5所示。
由图5可见,算法所估计的平动幅度变化准确反映输电线运动总能量变化;FFT变换后的频谱图如图6所示,易知幅度最高点0.178 2所对应的频率为2Hz,即准确识别了运动频率。以上表明,此算法可估计输电线平动幅度并直观反映运动趋势,且能精准识别出某时刻的运动频率。

图5 输电线运动能量和平动幅度评估
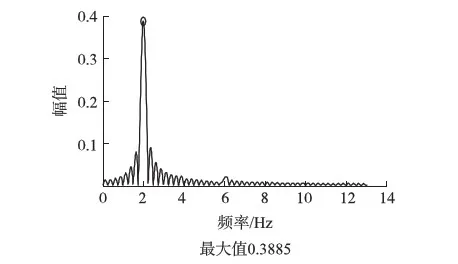
图6 识别频率幅频图
3.2 系统测试
搭建了输电网络运动测试平台如图7所示,CMD安装档距的1/8处。用鼓风机模拟自然风进行系统在线监测可靠性测试。测试表明,此系统可以监测运动情况并在自主开发的专家软件(图中监测主机)实时显示运动(平动、扭转)幅度、频率、微气象信息等,设置有超限报警功能,报警阈值可调,异常情况数据存储库,开发了智能终端监测软件,局域网条件下,可在智能终端查询相关信息。实验室条件下,该套系统能正常运行。
抽取一些运动幅度超限的数据进行离线分析,计算输电线运动能量,评估平动幅度,并对此时数据进行FFT变换。结果如下:
由图8可以看到,数据点2 500处能量E变化较大,幅度曲线越过0.9,此时输电线运动剧烈,系统发出警报信息。图9为此时刻幅频图,其中幅值最大点所对应的频率即为此时刻输电线运动频率。
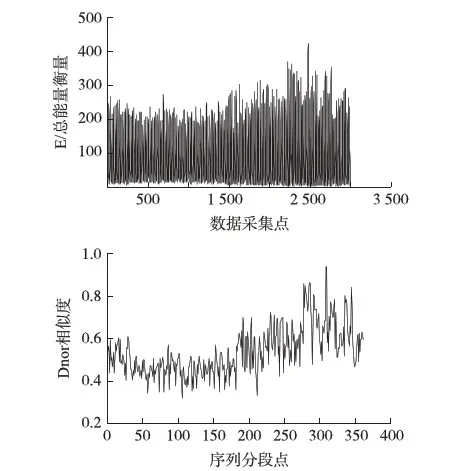
图8 实测平动幅度估计
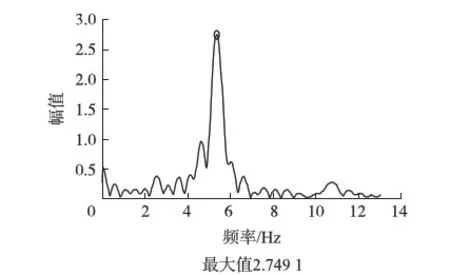
图9 超限时刻幅频图
4 结论
本研究通过对MIMU系统采集的MIMU信号数据进行时间序列的ARMA建模,并利用卡尔曼滤波对信号进行处理,对处理后的数据,提出了一种输电线运动幅度衡量标准,根据数据段相似理论,评估输电导线的平动幅度和扭转幅度,利用FFT变换准确求得输电线运动频率。实验表明,此方法能够有效地评估输电线平动幅度和扭转幅度、得出运动频率。除此以外,本设计还具有成本低、安装方便、数据计算量小等工程方面的优点。以上表明,此方案算法可以有效用于输电线路运动的监测。
[1] 战杰. 输电线路状态监测诊断技术[M]. 北京:中国电力出版社,2014.
[2] 张帆,熊兰,刘钰. 基于加速度传感器的输电线舞动监测系统[J]. 电测与仪表,2009(1):30-33.
[3] 黄新波,赵隆,周柯宏,等. 采用惯性传感器的输电导线舞动监测系统[J]. 高电压技术,2014(5):1312-1319.
[4] 邵颖彪. Monitoring Galloping of Transmission Lines Based on Nine-Axis Sensors[J]. Smart Grid,2015,05(01):1-8.
[5] Qian G,Sural S,Gu Y,et al. Similarity between Euclidean and Cosine Angle Distance for Nearest Neighbor Queries:ACM Symposium on Applied Computing[Z]. 20101232-1237.
[6] Sun H,Peng Y,Chen J,et al. A New Similarity Measure Based on Adjusted Euclidean Distance for Memory-Based Collaborative Filtering[J]. Journal of Software,2011,6(6):993-1000.
[7] 杨金显,李志鹏. MIMU信号下的变形预测[J]. 测绘通报,2015(10):57-59.
[8] Liu J,Deng Z. Self-Tuning Weighted Measurement Fusion Kalman Filter for ARMA Signals with Colored Noise[J]. Applied Mathematics and Information Sciences. 2012,6(1):1-7.
[9] 代金华,张丽杰. 多准则MEMS陀螺随机误差在线建模与实时滤波[J]. 传感技术学报. 2016,29(1):75-79.
[10] Yang P P,Li Q. Kalman Filtering of MEMS Gyro Based on Time-Series Model:International Conference on Electronic Measurement and Instruments[Z]. 20092-367.
[11] Zhao L,Wang C,Min L,et al. Research on FFT and FBG Mechanical Vibration Monitoring System[J]. Applied Mechanics and Materials. 2012,229-231:1332-1337.
[12] Miao Y,Zhong M,Liu Z,et al. Analysis of Wood Vibration Energy Attenuation Based on FFT Vibration Signal[J]. Bioresources,2014,10(1):272-281.
Monitoring Technology of Transmission Line Movement Based on MIMU*
YANG Jinxian1*,WANG Pengfei1,LUO Yufeng1,YANG Chuang1,LI Shuanglei2
(1.School of Electrical Engineering and Automation,Henan Polytechnic University,Jiaozuo He’nan 454003,China;2.State Grid Linqu Shandong power supply company,Shandong,Linqu Shandong 262600,China)
On the base of the transmission line movement monitoring techniques presently,a monitoring technology of transmission line movement base on MIMU is presented. The signals of MIMU are collected and establish ARMA model of MIMU time series and the data signals are processed by Kalman filter;and then treat the sum of squares of each axis specific force and the squares of angular velocity as a standard to measure the amplitude of the transmission line vertical motion and rotation,then the processed data is putted into different segments,through monitoring the euclidean similarity between data segments to measure the the magnitude of the transmission line vertical motion and rotation,motion frequency is obtained by FFT of acceleration and angular velocity data. Three different magnitudes movement of transmission line were simulated by the swings of turntable and the data was collected and processed by the algorithm above. The results show that the estimated vertical motion and rotational amplitude trends are the same as true amplitude. The simulation system can work properly under the laboratory conditions.
MIMU;transmission line;movement monitoring;time-sequence model;Similarity

杨金显(1980-),男,副教授/博士,硕士生导师,1999年9月至2008年6月毕业于哈尔滨工程大学,分别获得探测制导与控制技术学士学位、导航制导与控制硕士和博士学位,研究方向为惯性导航及应用,yangjinxian@hpu.edu.cn;

王鹏飞(1993-),男,硕士研究生。主要研究方向为MEMS惯性器件应用,数据处理。
项目来源:国家自然科学基金项目(41672363,U1404510,61440007);河南省科技攻关项目(172102210289);河南省高校基本科研业务费专项资金项目(NSFRF1619);河南省创新型科技人才队伍建设工程项目(CXTD2016054);河南理工大学杰出青年基金项目(J2017-5)
2016-10-28 修改日期:2017-01-19
O232;TM755;TP212.9
A
1004-1699(2017)05-0795-06
C:7210;7220;7230E
10.3969/j.issn.1004-1699.2017.05.027
