陀螺漂移误差建模与滤波*
2017-05-24郑伦贵王建中
李 杰,郑伦贵,2*,王建中
(1.中北大学仪器科学与动态测试教育部重点实验室,太原 030051;2.清华大学精密测试技术及仪器国家重点实验室,北京 100084)
陀螺漂移误差建模与滤波*
李 杰1,郑伦贵1,2*,王建中1
(1.中北大学仪器科学与动态测试教育部重点实验室,太原 030051;2.清华大学精密测试技术及仪器国家重点实验室,北京 100084)
MEMS陀螺漂移误差直接影响光电稳定跟踪平台伺服机构的控制精度。针对MEMS陀螺随机漂移误差慢时变、弱非线性、难以准确补偿的特点,基于随机序列时序分析法的基本原理,对预处理后的MEMS陀螺漂移残差信号进行建模,并根据模型对残差信号进行Kalman滤波。结果显示滤波前后信号的方差提高了1到2个数量级,表明有效抑制了漂移误差,提高了MEMS陀螺的精度。
MEMS陀螺;随机漂移;时间序列分析;Kalman滤波
光电稳定跟踪平台因其能隔离载体运动对载荷的干扰,在现代武器系统和民用设备中得以广泛应用。作为其关键部件,MEMS陀螺的测量误差将直接影响稳定平台的稳定精度。MEMS陀螺的系统误差可通过数学模型得以准确补偿,而随机漂移误差具有慢时变、弱非线性的特点[1],其长时间的误差积累将严重污染姿态角的量测结果,故降低MEMS陀螺的随机漂移误差能够有效改善陀螺的性能,从而提高稳定平台的精度。小波分析难以选取合适的小波基及变换尺度[2-6],神经网络法存在训练时间长、易陷入局部最小值的缺陷[7-10],而时间序列分析[11-14]应用于随机序列建模预测,具有灵活简便的特点。
1 时间序列分析法建模
一个平稳、正态分布的随机序列可以用自回归滑动平均模型,即ARMA(p,q)模型表示为
(1)
如果模型中q=0,则模型退化为自回归模型AR(p),即
xt=φ1xt-1+φ2xt-2+…+φpxt-p+εt
式中:φi(i=1…p)为自回归系数。
时间序列分析方法建模要求随机信号必须为平稳、正态、零均值序列。若原始信号不符合建模要求,则首先必须对信号进行预处理,当预处理后的残差信号通过检验具备建模基础后,根据自相关、偏自相关函数的统计特性,选取合适的模型阶数并进行辨识,其一般过程包括:数据采集、数据统计分析与预处理、模型定阶、模型参数辨识、模型检验等,如流程框图1所示。
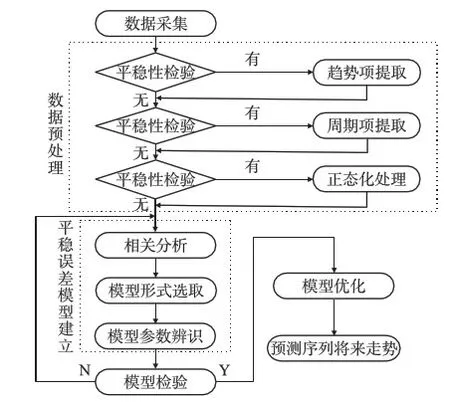
图1 式时间序列分析建模流程图
1.1 数据采集
光电稳定跟踪平台采用国产某型号低成本模拟MEMS陀螺,以256 Hz频率采集常温静置下MEMS陀螺的X轴输出作为原始漂移信号,采样时间为10 min,选取当中的3 000个采样点作为处理样本,如图2所示。

图2 MEMS陀螺X轴原始漂移信号
1.2 数据预处理
受外部环境及内部因素的影响,MEMS陀螺原始漂移信号中包含常值分量、奇异值、趋势项、周期项等误差,难以保证其为平稳、正态、零均值序列。首先,采用莱特准则(3σ准则)剔除奇异点,去除其均值则为零均值序列;然后,通过一阶或二阶差分处理提取趋势项,通过功率谱图提取其周期项;最后,对预处理后的信号进行平稳性、正态性检验,以保证该残差信号满足建模所需要求。
对残差信号的平稳性检验采取了游程检验法,假设n1是样本一种观测量的个数,n2是另一种观测量的个数。如果序列平稳,那么有游程数r的均值和方差为
(2)
在显著水平α=0.05下,游程个数检验变成U检验,r的范围如下
(3)
如果U>1.96,则拒绝原假设,MEMS陀螺漂移序列为非平稳序列,进行差分处理。经检验,U=1.903 3<1.96,接受原假设,序列平稳。
预处理后的信号及正态检验如图3和4所示。
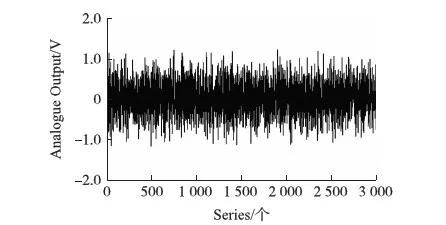
图3 预处理后漂移信号
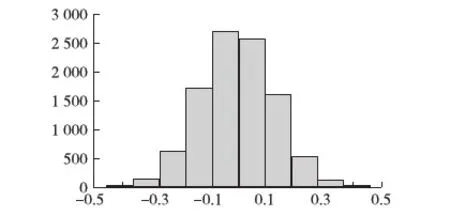
图4 预处理后信号分布直方图
1.3 模型定阶、参数辨识及检验
MEMS 陀螺仪漂移模型的阶次都比较低,一般不超过2到3阶,根据自相关、偏自相关函数的统计特性,取漂移误差模型阶数为3,利用最小二乘法估计法得到对应的AR(3)和ARMA(2,1)模型系数分别如表1所示。
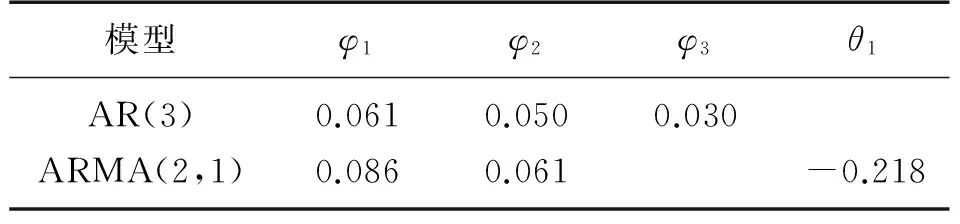
表1 误差模型系数
根据最终预测误差FPE(Final Prediction Error)准则,即
(4)
选取最终MEMS陀螺随机漂移误差模型为ARMA(2,1),预测估计结果如图5所示。
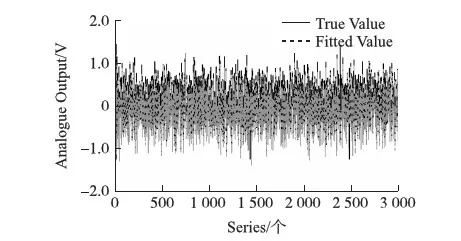
图5 ARMA(2,1)模型预测结果
2 Kalman滤波
在上述MEMS陀螺漂随机移误差模型ARMA(2,1)基础上,可采用Kalman滤波方法对MEMS陀螺漂移误差进行补偿。由漂移模型,系统的状态方程和量测方程可描述为:
(5)
式中:φk,k-1为一步转移矩阵;Wk-1为k-1时刻的系统噪声;Гk-1为系统噪声矩阵;Hk为k时刻的量测矩阵;Vk为k时刻的量测噪声。参考文献[12-13],滤波器参数设置如下:
设系统过程噪声{Wk-1}和量测噪声{Vk}的方差分别为Ok-1和Rk,取Ok-1为ARMA(2,1)模型残差信号的方差,Rk为量测信号方差的十分之一,Pk|k-1为一步预测误差的协方差矩阵,初值为单位矩阵;那么,Kalman滤波器的基本方程可写为[15]
(6)
3 自适应Kalman滤波
在实际应用中很难得到系统精确的数学模型和噪声的统计特性,致使滤波精度降低甚至产生滤波发散的现象。Sage和Husa提出的自适应Kalman滤波算法,其本质就是利用自身获取的某些信息不断估计和修正模型噪声方差矩阵Q和量测噪声R,不断改进滤波器的设计,降低滤波误差。在KF算法的基础上引入遗忘因子d,可限制滤波器的记忆长度,使得新近数据充分参与到估计中发挥其作用,工程简化算法如下
(7)
式中:dk为遗忘因子,0 利用数学工具MATLAB 7.0对MEMS陀螺X轴漂移数据进行了处理,噪声为白噪声序列,自适应Kalman算法的遗忘因子设值为0.98,处理结果如图6和表2所示。 图6 KF和自适应KF滤波结果 原始数据KF自适应KF均值0.03960.0033-0.0017方差0.17370.03870.0034 由图6可以直观看到,KF和自适应KF滤波后的漂移信号波动起伏明显变小,由表2方差对比也可以看出滤波后的漂移信号方差比原始信号小了一个数量级,表明滤波后信号的分散程度显著减小,而均值变化甚微,这主要是因为Kalman滤波属于线性无偏最优估计。同时,较文献[12-13]的KF算法,本文所采用的自适应KF算法具有更佳的效果。 本文对MEMS陀螺随机漂移误差特性进行了研究,在原始漂移信号统计分析及预处理的基础上,建立了误差ARMA(2,1)模型,并进行了Kalman滤波。滤波前后信号的方差对比表明有效降低了MEMS陀螺的漂移误差,提高了实用性能。 [1] Meng T,Wang H,Li H,et al. Error Modeling and Filtering Method for MEMS Gyroscope[J]. Systems Engineering and Electronics,2009,8:30-38. [2] Ningfang S,Jing C,Jing J. Wavelet Variance Analysis of Random Error Properties for Fiberoptic Gyroscope[J]. Infrared and Laser Engineering,2010,39(5):924-928. [3] Wu W,Wang Y,Chen H,et al. Research on FOG Signal Process Based on wavelet transform[C]//Control,Mechatronics and Automation Technology:Proceedings of the International Conference on Control,Mechatronics and Automation Technology,2015,6(75):71-78. [4] Song N,Chen J,Jin J. Wavelet Variance Analysis of Random Error Properties for Fiber Optic Gyroscope[J]. Infrared and Laser Engineering,2010,5:30-34. [5] Li Z,Fan Q,Chang L,et al. Improved Wavelet Threshold Denoising Method for MEMS Gyroscope[C]//11th IEEE International Conference on Control and Automation(ICCA). IEEE,2014:530-534. [6] 刘永. 小波分析在MEMS陀螺信号降噪中的应用研究[D]. 北京:国防科学技术大学,2011. [7] Wu D,Fei J,Xue Y. Adaptive Neural Integral Sliding Mode Control Using Neural Compensator for MEMS Gyroscope[C]//2016 IEEE International Conference on Industrial Technology(ICIT). IEEE,2016:36-41. [8] Chong S,Rui S,Jie L,et al. Temperature Drift Modeling of MEMS Gyroscope Based on Genetic-Elman Neural Network[J]. Mechanical Systems and Signal Processing,2016,72:897-905. [9] Fei J,Wu D. Adaptive Control of MEMS Gyroscope Using Fully Tuned RBF Neural Network[J]. Neural Computing and Applications,2015:1-8. [10] 王昊,王俊璞,田蔚风,等. 梯度RBF神经网络在MEMS陀螺仪随机漂移建模中的应用[J]. 中国惯性技术学报,2006,14(4):44-48. [11] 赵灵. 基于MEMS陀螺仪的稳定平台关键技术研究[D]. 南京:南京理工大学,2013. [12] 吉训生,王寿荣. MEMS 陀螺仪随机漂移误差研究[J]. 宇航学报,2009,27(4):640-642. [13] 李杰,张文栋,刘俊. 基于时间序列分析的Kalman滤波方法在MEMS陀螺仪随机漂移误差补偿中的应用研究[J]. 传感技术学报,2006,19(05B):2215-2219. [14] 代金华,张丽杰. 多准则MEMS陀螺随机误差在线建模与实时滤波[J]. 传感技术学报,2016,29(1):75-79. [15] 高钟毓. 惯性导航系统技术[M]. 北京:清华大学出版社,2012:145-190. Error Modeling and Filtering for Drift of MEMS Gyroscope* LI Jie1,ZHENG Lungui1,2*,WANG Jianzhong1 (1.Educational Key Laboratory for Instrument Science and Dynamic Measurement,North University of China,Taiyuan 030051,China; 2.National Key Laboratory of Precision Measurement Technology and Instrument,Tsinghua University,Beijing 100084,China) The control accuracy of the electro-optical stability tracking platform is directly affected by the drift error of MEMS gyroscope. The random drift error of MEMS gyroscope is slowly time-drifting,Weakly nonlinear and difficult to be accurately compensated. Aiming at the above characteristics,a model is built for the residual signal of MEMS gyro drift error based on the principle of time-series analysis. The Kalman filtering results show that the variance of the signal is improved by one to two magnitudes,which shows that the drift error is effectively suppressed and the accuracy of the MEMS gyroscope is improved. MEMS gyroscope;random drift;time series analysis;Kalman filter 李 杰(1987-),男,河北人,博士研究生,测试计量技术与仪器专业,主要研究方向为惯性系统及测试,组合导航算法研究,583598264@qq.com; 郑伦贵(1980-),男,四川人,讲师,仪器科学与技术专业,主要研究方向为卫星姿态确定及控制,捷联惯导和组合导航系统研究。 项目来源:清华大学精密测试技术及仪器国家重点实验室开放基金项目(16106000005) 2016-10-10 修改日期:2017-01-16 TN914.42 A 1004-1699(2017)05-0731-04 C:7230 10.3969/j.issn.1004-1699.2017.05.0164 验证分析
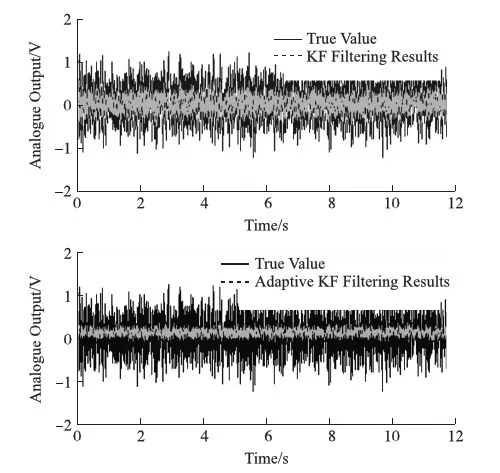

5 结束语


