基于隧道磁阻效应的反正切转速测量方法*
2017-05-24蒋孝勇李孟委张晓峰张加书包旭馨
蒋孝勇,李孟委*,张晓峰,张加书,包旭馨
(1.中北大学电子测试技术国家重点实验室,太原 030051;2.中北大学仪器科学与动态测试教育部重点实验室,太原 030051;3.中北大学微系统集成研究中心,太原 030051)
基于隧道磁阻效应的反正切转速测量方法*
蒋孝勇1,2,3,李孟委1,2,3*,张晓峰2,3,张加书3,包旭馨1
(1.中北大学电子测试技术国家重点实验室,太原 030051;2.中北大学仪器科学与动态测试教育部重点实验室,太原 030051;3.中北大学微系统集成研究中心,太原 030051)
针对传统转速测试系统精度低、温度稳定性差、测量范围窄等问题,提出一种基于隧道磁电阻(TMR)效应的高性能转速测试系统。在没有误差校正的情况下实现了0.19°的位置检测精度,已经达到了工程应用中常见的2 000线编码器精度。本方法在被测转轴上布置磁栅环,利用具有高分辨率高频响特性的隧道磁电阻传感器对磁栅微弱磁场变化进行检测,得出频率随转速变化的正余弦信号。实验分别采用定时测角法、定角测时法和反正切法计算转速,结果表明3种算法中反正切算法检测精度最高,可达1.25%,更适合于隧道磁阻转速测量系统。
转速测量;隧道磁阻传感器;反正切;环形磁栅
转速测量技术已被广泛运用于汽车和工业领域,并在速度、角度、角速度、旋转方向等方面的测量有着重要的贡献[1-3]。转速测量的方法主要分为:光电式、感应发电机式、霍尔式、磁阻式等[4]。目前国内外光电式编码器测量精度最高可达24位,位置检测精度为0.07″,但光电式测速方法防尘、防油污、抗震动能力差[5-6]。文献[7]中提到用巨磁阻效应进行转速测量实现的速度测量精度为0.63%,但位置测量精度仅为11.25°。江苏多维科技采用的隧道磁阻转速测量方法可达到0.35°的位置检测精度。本文采用的是灵敏度最高、响应速度最快、温度稳定性最好的第4代隧道磁阻传感器TMR[8]进行转速测量,以解决传统转速测量中精度低、响应慢、温度稳定性差等问题。
传统的编码器测速算法主要有定时测角法,定角测时法以及混合测速法等测速方法[9-10],但是测速稳定性和测速延时之间的矛盾一直是阻碍传统测速方法进一步发展的障碍。本文分析对比3种转速测量方法(定时测角法、定角测时法、反正切法)后,最终采用反正切转速测量方法[11],理论上只要ADC采样频率和转换精度足够,可以实现任意转速下的转速测量。
1 隧道磁阻效应
隧道磁阻效应是一种凝聚态量子力学效应,磁致电阻在室温下可引起阻值1 056%的剧烈变化[12],并且随场强增长成几何数增长。本文基于此提出一种隧道磁阻效应的转速测量原理,利用磁敏感电阻检测电机驱动磁体导致的磁场变化,磁场变化引起磁敏电阻中的电子自旋,从而导致隧道磁阻阻值发生剧烈变化,通过测量阻值变化实现对转速的检测。表1给出了4种不同效应下的传感器性能对比。
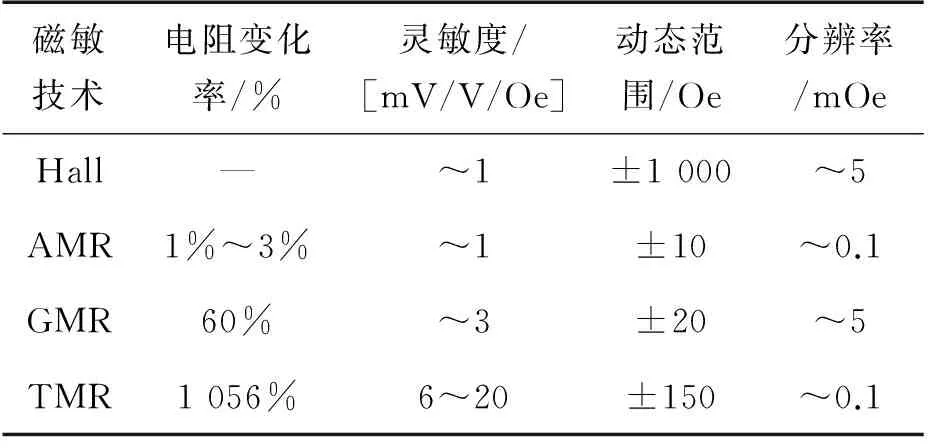
表1 Hall、AMR、GMR、TMR性能指标对比
为了对比ARM、GMR、TMR磁阻效应的性能参数,本文搭建了磁屏蔽桶标定实验。同时测试标定了TMP(P44FP);TMR(Q4V7F);GMR(MTG-L5B);AMR(MT10C)4种磁阻传感器的灵敏度和线性度指标。4种传感器均采用惠斯通放大电路。磁屏蔽桶不仅可以屏蔽外界磁场干扰,而且可以提供一个高精度的磁场环境。磁屏蔽桶可以提供(5.57×10-4~0.890 68)Oe范围的磁场。信号发生器输出电压作为磁屏蔽桶的电源,由精密万用表反馈回的电压值计算出屏蔽桶内的磁场强度。具体连接方式如图1所示。
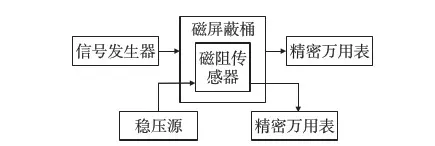
图1 实验系统
将传感器测试电路板固定在安装台上,保证传感器的敏感轴方向与桶轴向平行。由屏蔽桶提供步长为0.05 Oe的磁场环境。记录传感器的差分输出电压值。每种传感器进行4组标定实验,并用MATLAB分别拟合三种传感器的灵敏度。实验数据结果如图2所示,在同等实验条件下,TMR传感器灵敏度要比AMR高一个数量级,比GMR高出2个~3个数量级。TMR、AMR、GMR线性度水平相当,都能很好的满足实际应用需求。
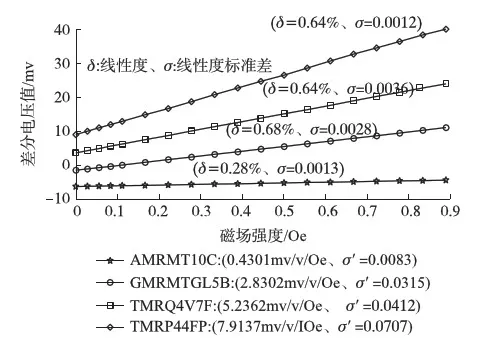
图2 实验数据及结果
2 转速测量算法对比
转速传感器测速的工作原理为:磁阻传感器输出的电压信号频率与电机的转速成正比。检测磁阻传感器的输出信号频率就可以计算出电动机转速。将磁栅安装在电机轴端上,随着电机转子一起旋转。磁栅环有44个磁极对,根据正反方向的充磁形成交替的N、S极。将磁阻传感器固定在随旋转轴旋转的磁栅环上表面。磁阻传感器具有两个相互正交的敏感轴。旋转的磁栅在磁阻传感器的上表面产生正弦变换的磁场,磁阻传感器的两端输出正弦变化的电压值。转速测量的原理示意图如图3所示。
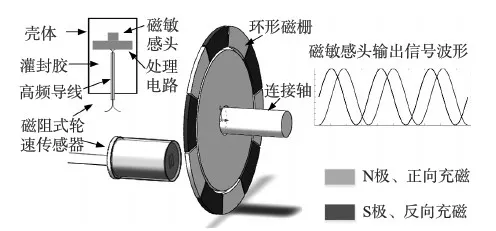
图3 磁阻式轮速传感器工作原理图
①反正切测频法
磁阻传感器输出两路正交的正余弦信号,对两路信号进行采样周期为t的采样,得到tn时刻的两路信号的电压值Vx、Vy,再利用θ=arctan(Vx、Vy)计算出tn时刻的角度值θn,θn-1为tn-1时刻的角度值。利用相邻时刻的角度差除以采样周期得出转速值w。图4为反正切原理图。计算公式如式(1):
(1)

图4 反正切测速原理
②定时测角法
首先将正余弦信号通过电压比较器转换成方波信号。然后在一定测量时间T内,测量脉冲发生器产生的脉冲数m1来测量转速(一个脉冲对应固定角度δ)。在时间T内,转轴旋转的角度为αn=m1δ。原理如图5所示。
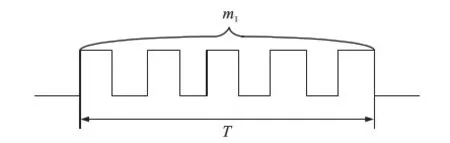
图5 定时测角法原理图
设在时间T内,转轴转过的弧度数为αn,则的转速w可由式(2)表示。
ω=αn/T
(2)
③定角测时法
让旋转轴转过已知角度,通过测量转过该固定角度所用时间计算转速。假设转轴转过m2个固定脉冲所用的时间为Tp,一个旋转脉冲对应的角度为δ,则m2个固定脉冲对应的角度为m2δ。转轴的转速可由式(3)计算得到。原理如图6所示。
ω=(m2δ)/Tp
(3)
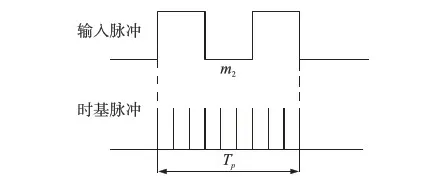
图6 定角测时法原理图
通过3种算法的原理分析可知,反正切转速测量方法理论上只要保证ADC的采样频率和采样精度,可以实现任意转速下的测量,且测量精度高。定时测角法,在高转速下检测精度高,但低转速下存在数不到脉冲的问题,导致测量精度低。定角测时法,在低转速下检测精度高,高转速下,检测精度低。本文通过实验,验证了反正切测量方法检测精度高于定时测角法和定角测时法。
3 实验测试与结果分析
实验测量仪器采用MOXA直流伺服电机系统。磁栅环由MOXA直流伺服电机带动旋转。旋转速度与旋转时间通过上位机软件控制。测速系统包括磁栅环、TMR磁阻传感器和信号调理电路。转动的磁栅环在隧道磁阻传感器上表面形成正弦变化的磁场。TMR传感器输出相位相差90°的正余弦信号,经仪表放大器放大后,进行低通滤波,最后经模数转换传输给微控制器进行转速解算,再由串口传输到上位机进行显示存储。详细框图如图7所示。

图7 系统总框图
传感器的信号调理电路部分作用为对微弱信号进行放大检测和模数转换,并通过RS232通信协议传输给上位机软件。微弱信号检测电路采用AD623仪表放大器,模数转换电路采用AD7689芯片。主控制器为STM32F103。图8为转速测量系统的电路板实物图。
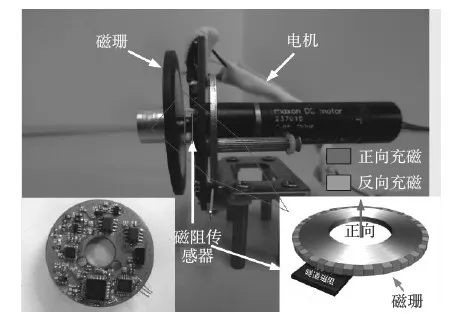
图8 隧道磁阻式轮速传感器原理样机
磁阻传感器的安装误差将直接影响最终的转速测量精度。磁敏感头的安转位置取决于磁栅环周围磁场分布。本文采用Maxwell磁场仿真软件,建模仿真得出的44磁极对汝铁硼材料磁栅环上表面2 mm处的磁场分布曲线。仿真结果显示磁栅环上表面磁场为正弦分部,旋转的磁栅环会引起磁阻传感器输出端电压呈相位相差90°的正余弦变化。能满足反正切转速测量要求。通过磁场仿真可以更准确的确定磁阻传感器与磁栅环的相对位置。磁阻传感器检测磁栅环上表面2 mm处径向和切线方向的磁场强度(及X方向和Y方向)。
磁珊环由MOXA直流祠服电机带动旋转,为转速测量系统提供一个已知的转速信号源。本文使用STM32单片机中的atan2(*,*)函数,该函数的值域范围(-π,π)。atan2(y,x)可以根据(x,y)坐标确定该点所在象限或是落在某一坐标轴上,进而避免了特殊角度计算出错现象。
在角度测量实验中通过直流电机伺服控制系统让电机由静止到固定转速下旋转,采集解算角度数据如图9所示。转速为零时,角度检测误差为0.19°。比江苏多维科技提供的TMR3101型绝对位置编码器角度精度0.35°高43.17%。理论上在反正切转速测量中,提高ADC的采样频率和采样精度可最大限度地提高角度测量精度。
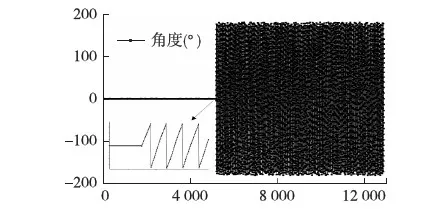
图9 角度测量实验结果图
在转速测量实验中通过直流电机伺服控制上位机软件让电机分别在0 r/s、1 r/s、2 r/s、3 r/s、2 r/s、1 r/s、0 r/s的转速下运行30 s。通过转速测量系统的上位机软件采集两路磁阻传感器的原始数据。原始信号为两路正交的正余弦信号。通过MATLAB分别编写反正切测速算法、定时测角算法和定角测时算法解算转速得出如图10的结果。实验结果表明3种方法都能正确解算出转速值。
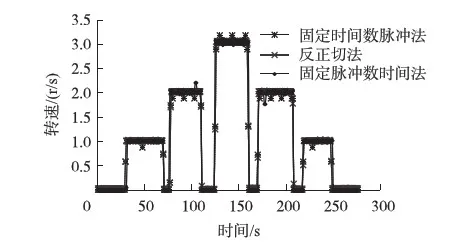
图10 3种算法所得测速数据
转速精度测量实验中通过电机伺服系统上位机软件控制电机以2 r/s的转速匀速旋转。通过转速测量系统上位机采存隧道磁电阻传感器原始数据,并通过MATLAB用3种测速方法解算电机转速,得到3种方法的误差曲线如图11所示。反正切算法误差0.025 r/s,占总转速的1.25%;定角测时法误差0.047 r/s,占总转速的2.35%;定时测角法误差0.134 r/s,占总转速的6.7%。实验结果表明反正切算法精度高于定角测时法高于定时测角法。
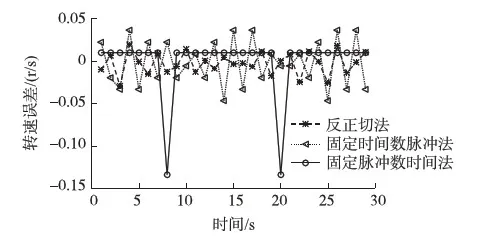
图11 3种算法误差图
4 结论
本文将最新的隧道磁阻效应应用于转速测量系统中,在没有误差校正的情况下实现了0.19°的位置检测精度,已经达到了市场上主流的2 000线旋转编码器工程应用精度。如果对本系统中的正余弦信号进行幅值误差校正、相位误差校正、正交误差校正后,本方法的测量精度仍有大幅提升的潜力。此外依靠本文搭建的实验系统,实验对比了反正切算法、定时测角算法和定角测时算法3种算法,发现反正切算法精度最高,可达1.25%,更适合于隧道磁阻转速测量系统。
[1] 杨文,裴东兴,张瑜,等. 弹丸动态参数测量的方法研究[J]. 传感技术学报,2015,28(10):1467-1470.
[2] 尚剑宇,张晓明,黄建林,等. 常规弹药转速测量时频分析方法研究[J]. 传感技术学报,2012,25(7):951-956.
[3] 冯立峰. 面向高精度伺服系统的磁电式编码器研究[D]. 哈尔滨:哈尔滨工业大学,2014.
[4] 黎琦. 基于磁性隧道结的齿轮传感器研究[D]. 兰州:兰州大学,2011.
[5] 冯英翘,万秋华. 小型光电编码器细分误差校正方法[J]. 仪器仪表学报,2013,34(6):1374-1379.
[6] 乔栋,续志军,吴宏圣,等. 绝对式光栅尺细分误差补偿方法[J]. 光学学报,2015,35(1):1-5.
[7] 孟庆丰. 基于GMR传感器的可辨向齿轮转速传感器的设计[D]. 杭州:杭州电子科技大学,2012.
[8] 王琪,李孟委,王增跃,等. 基于隧道磁阻传感器的三维电子罗盘设计[J]. 传感技术学报,2015,28(6):895-899.
[9] Xu Jian,Zhang Gengshi,Li Benyin. Engine Revolution Speed Measurement Method Based on Single-Point Virtual Vibration Power[J]. Chinese Journal of Scientific Instrument,2014,35(3):697-702.
[10] Wang Xianjun. Errors and Precision Analysis of Subdivision Signals for Photoelectric Angle Encoders[J]. Optics and Precision Engineering,2012,20(2):379-386.
[11] 叶菁. 多功能转速测量仪的研制[D]. 天津:天津大学,2012.
[12] Jiang Lixian,Hiroshi Naganuma,Mikihiko Oogane,et al. Large Tunnel Magnetoresistance of 1 056% at Room Temperature in MgO Based Double Barrier Magnetic Tunnel Junction[J]. Applied Physics Express,2009(2):083002.
Method for Measuring the Rotation Speed of the Tunnel Based on the Tunneling Magnetoresistance Effect*
JIANG Xiaoyong1,2,3,LI Mengwei1,2,3*,ZHANG Xiaofeng2,3,ZHANG Jiashu3,BAO Xuxin1
(1.Science and Technology on Electronic Test & Measurement Laboratory,North University of China,Taiyuan 030051,China;2.Key Laboratory of Instrumentation Science & Dynamic Measurement Ministry of Education,North University of China,Taiyuan 030051,China)3.Center for Microsystem Intergration North University of China,North University of China,Taiyuan 030051,China)
In view of the problems of low precision,low temperature stability and narrow measurement range of traditional rotating speed test system,a high performance test system based on the effect of tunnel magnetic resistance(TMR)is proposed. In the case of no error correction,the accuracy of 0.19 degree position detection has been achieved. This method has reached the 2 000 line encoder accuracy in engineering applications. In this method,the magnetic ring is arranged on the shaft to be measured,and the magnetic field is detected by the tunnel magnetoresistive sensor with high resolution and high frequency response. The sine and cosine signals with the frequency change with the speed are obtained. In this paper,we use the method of the timing angle measurement method,the fixed angle time measurement method and the arc tangent methodto calculate the rotation speed. The results show that the arctangent algorithm has the highest detection accuracy of 1.25%,which is more suitable for the measurement system of the tunnel reluctance speed.
rotational speed measurement;TMR sensor;anyway cut;toroidal magnetic gate.

蒋孝勇(1992-),男,河南信阳人,中北大学电子测试技术国家级重点实验室在读研究生,主要从事惯性仪器仪表方面的研究,lmwnuc@163.com;

李孟委(1975-),男,通信作者,副教授,主要开展新原理MEMS惯性传感器及导航研究,专注于MEMS陀螺研究,对新原理、新效应的微纳米器件创新设计感兴趣。
项目来源:总装预研基金项目;国家自然基金项目(61571405)
2016-11-07 修改日期:2017-03-13
TH868
A
1004-1699(2017)05-0692-05
C:7320E
10.3969/j.issn.1004-1699.2017.05.010
