高精度石英加速度计采集电路设计
2017-05-24郝鹏,张伟,陈锐
郝 鹏,张 伟,陈 锐
(1.西安飞行自动控制研究所,西安 710065;2.中国人民解放军驻航天210所军事代表室,西安 710065)
高精度石英加速度计采集电路设计
郝 鹏1*,张 伟2,陈 锐1
(1.西安飞行自动控制研究所,西安 710065;2.中国人民解放军驻航天210所军事代表室,西安 710065)
从高精度捷联惯导系统加速度计信号采集需求出发,设计了一种高精度、低功耗、小型化的加速度计信号采集方案,采用数字补偿方案对转换电路的零位和标度因数温度系数进行了补偿校准,补偿后其全温指标提高了一个数量级。经实际电路测试验证,其在-55 ℃~+85 ℃温度范围内的标度因数全温变化小于0.5 ppm/℃,全温零位小于10 μg,标度因数年重复性达到10 ppm,电路常温功耗仅为1.8 W,测试结果表明该电路方案满足高精度捷联惯导系统应用需求。
捷联惯导系统;加速度计信号采集;数字补偿;标度因数
高精度、长航时、小型化、低功耗一直是捷联惯导系统的发展趋势[1],其对传感器及其电子组件的综合性能提出了更高的要求,而加速度计及其采集电路作为其关键组件直接影响惯导系统的精度性能[2]。石英挠性加速度计以其高精度、低功耗、良好的稳定性和温度特性,一直作为高精度捷联惯导系统的加速度计敏感组件[3]。其输出模拟电流敏感加速度计变化,后端采集电路主要完成加速度计输出电流的数字转换,并提供给计算机进行惯性解算处理。
国外高精度石英挠性加速度计采集电路主要以Honeywell公司的电流/频率转换(I/F)方案和早期Litton公司的数字量化方案最具有代表性[4-6]。I/F转换方案相比电压/频率转换(V/F)方案、电压/时间转换(V/T)方案等少了前级电流/电压转换(I/V)误差环节,并具有零位小、电路简单、频率输出易于后端数字电路处理等优点,被广泛应用于高精度加速度计采集电路中[7-8]。但由于I/F转换电路采用恒流源反馈,其电路功耗大,启动时间长,在高精度应用场合需配温控电路,因此无法满足小体积、低功耗的捷联惯导系统应用需求。数字量化方案主要将加速度计输入电流转换为电压量,通过对电压量进行积分、采样以及数字滤波和解算处理实现转换功能,该方案具有启动速度快、刻度系数大、电路集成度高等优点,虽增加了I/V转换环节,但可通过数字滤波处理和数字补偿方案提高电路零位和标度因数的全温性能指标,适合于对于精度、体积、功耗综合要求高的应用场合。
本文为实现高精度加速度计信号采集,同时解决低功耗、小型化等工程化应用问题,基于现场可编程门阵列(FPGA)+模数转换器(ADC)构建了积分测斜式的数字量化方案。
1 原理方案分析
本文针对某型捷联惯导系统设计需求,其前端石英挠性加速度计标度因数为(1.25±0.2)mA/g,量程±20gn,年重复性指标为2×10-5gn,根据系统指标分解要求采集电路的稳定性和重复性达到10 ppm,分辨率优于1 nA,零位全温小于20 μg,标度因数非线性和温度系数全温均小于50 ppm,电路功耗小于2 W。
综合考虑设计需求,建立积分测斜式量化方案的数学模型,分析关键电路设计指标,电路方案数学模型见图1所示。
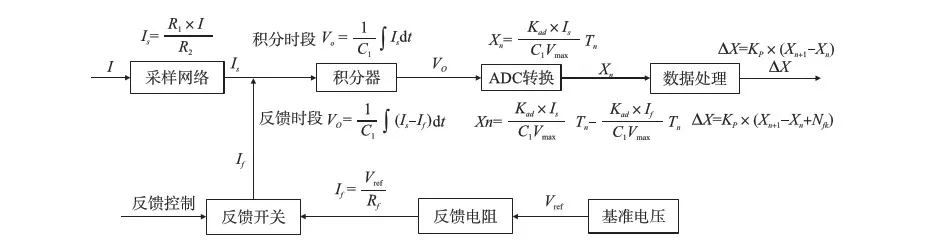
图1 电路方案数学模型
加速度计输出电流经过采样网络后进入积分器,积分后输出电压V0,V0通过ADC的定时采样得到Xn,由Xn+1-Xn可以计算出积分器电压斜率,斜率正比于输入的加速度计电流,从而可以计算出加速度计的输出电流。当积分器达到反馈门限电压±Vmk时接入反向基准电压,保证积分器工作在最优线性区,避免积分器饱和,积分器输出和采样波形见图2所示。
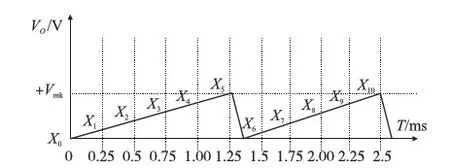
图2 积分器输出和采样波形
采集电路采用积分测斜的数字量化方式,计算单位时间内的积分增量,则:
积分过程的量化斜率输出为(小于积分门限,反馈未接入):
(1)
反馈过程的量化输出为(大于积分门限,反馈接入):
(2)式中:R1为采样电阻,R2为积分器输入电阻,Rf为基准反馈电阻,C1为积分电容,ΔT为A/D采样时间间隔,ΔTf为基准反馈时间,Vmax为A/D转换器的满量程电压,Kad为A/D转换器的满量程电压对应码值,Kp为标度因数归一化系数,Nfk为积分标定反馈量。
由图1原理简图及式(1)、式(2)可知,数字量化器误差源主要包括采样电路误差[9]、A/D转换误差、积分器误差[10-11]、基准反馈误差。因此为满足整体量化指标需求,各子电路设计指标应满足整体指标1个数量级的设计余量。其中模拟电路和模拟器件的设计和选型决定整个方案的性能基础,电阻应选取低温漂、高稳定性的合金箔电阻器,积分电容应选取长期稳定性好、温度系数小的有机电容器,积分器和基准电路设计需兼顾电路直流特性指标和交流特性指标的综合要求。数字电路部分主要为低功耗、小型化的设计核心,应最大程度简化模拟电路设计复杂度,提高电路集成度。
2 电路方案设计
本文构建了基于FPGA+ADC的积分测斜式的量化方案,其功能框图如图3所示。
输入电流通过采样网络转换为输入电压,输入电压经积分器输入同步采样ADC进行模数转换,FPGA通过并行总线获取ADC量化值并检测积分门限,控制反向电压基准接入,避免积分器饱和,同时FPGA完成积分电压信号的增量采样,计算积分斜率从而获得与加速度电流对应的数字量,解算数字量通过RS422总线发送给导航计算机。外部电可擦除存储器(E2PROM)存储采集电路标度因数温度系数补偿值,用于采集电路标度因数温度系数自补偿,温度传感器用于采集电路的实时温度获取,加速度计温度采集用于提供系统传感器补偿的实时温度数据。

图3 原理方案功能框图
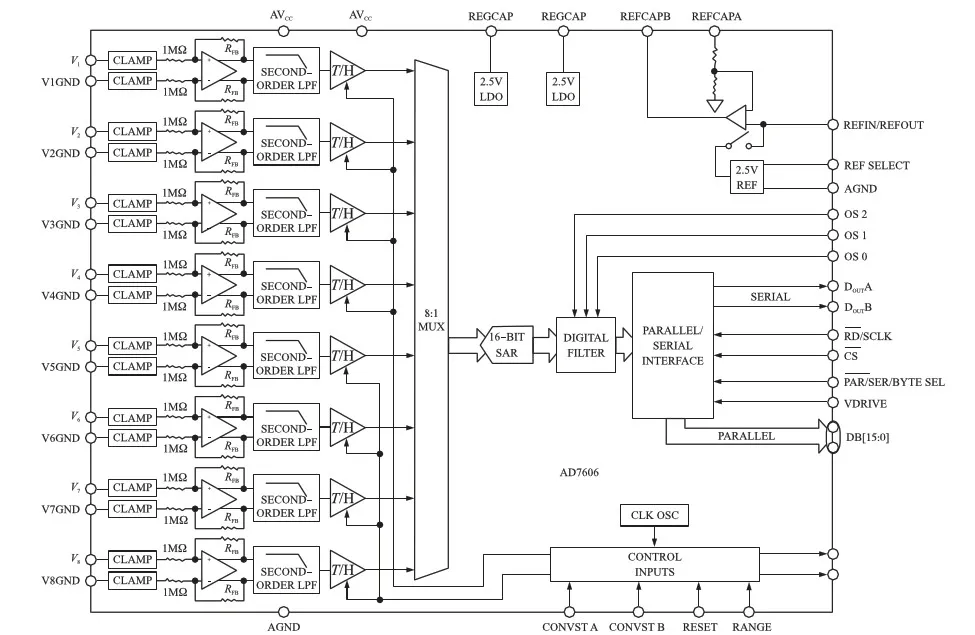
图4 AD7606功能框图
其中ADC芯片和FPGA为电路主要核心数字器件,其集成度和功耗直接决定整个采集电路能否满足小型化低功耗设计需求。因此本设计中选用ActelProASIC3系列的A3P1000低功耗FPGA,其尺寸仅有13mm×13mm,100万门逻辑资源,片上自带Flash非易式存储器,单片可完成所有采集电路的控制、解算、补偿,实际采集电路使用逻辑资源90%,而实测动态功耗仅为0.2W。
ADC芯片选用ADI公司的8通道16位同步采样ADC芯片AD7606[12],AD7606的功能框图见图4所示。该ADC芯片集成8路16位同步ADC,可满足4路传感器信号和4路温度信号的采集量化,同步采样可减低三路加速度计信号采集的通道延时,同时AD7606内部集成输入缓冲器、嵌位保护电路、二阶抗混叠模拟滤波器以及可与FPGA直接交联的输出驱动接口,大大减少外围电路器件数量,同时其动态功耗小于0.15W,是理想的单片解决方案,采用该数字方案可在70mm×70mm电路板尺寸下实现完整采集电路功能。
3 补偿方案设计
采集电路主要完成传感器模拟电流信号的转换,其电路静态误差模型与加速度计静态模型相似[13],设输入电流为变量x,输出数字量为变量y,可得理想转换式(3),考虑到电路误差等影响因素,实际转换结果见式(4)。
y=kx
(3)
y=k0+k1x+k2x2+…+kN-1xN-1+kNxN
(4)
而对于电路特性指标,一次项以上高阶项可忽略,因此误差源主要包括标度因数k1以及实际转换电路的偏值误差k0。电路常温指标设计易于实现,但由于器件本身温度系数影响,全温指标难以满足指标需求,因此必须对其全温误差进行补偿,即全温零位补偿和标度因数温度系数补偿。
本文采用四通道校零方案消除全温零位偏差,其电路原理见图3所示。三轴加速度计电流信号流入采集电路校零开关,通过控制校零开关时序,在单位工作周期内将三路加速度计输入电流分别切换到AIN通道,同时本通道输入断开用于测量通道零位,通过FPGA在每单位周期用测量值减去上一个周期的通道零位测量值以消除零位影响。
标度因数随温度变化,传统温度补偿采用分点定温建模和二阶或多阶线性拟合的温度补偿方式[14]。虽电路实现简单,但需多个定温保温过程,其建模测试时间长,且与系统实际变温的使用情况相差较大,补偿模型的鲁棒性差,特别是对于高低温下非线性趋势加剧的补偿对象,难以保证补偿效果的一致性。因此本文采用标度因数的查表补偿法,首先对电路标度因数进行全温下的慢变温测试建模[15],为兼顾测试效率和补偿效果选取1min1 ℃的升温速率,分别施加正负激励电流,实时采集-55 ℃~+85 ℃温度变化范围内标度因数输出值,从-55 ℃开始取每(5.0±0.5)℃间隔的测试数据平均值计算该温度点的刻度系数补偿值,全温共29个补偿点。并通过上位机串口加载参数存储于电路的E2PROM中,FPGA通过温度传感器实时获取温度测量值,查表获得E2PROM对应温度的标度因数补偿值进行温度补偿,每5 ℃范围内采用两点间线性拟合,其补偿参数标定和补偿工作流程见图5所示。温度补偿参数建模需结合系统使用环境考虑温升速率的影响,补偿电路的设计需折中考虑补偿性能和动态特性要求。
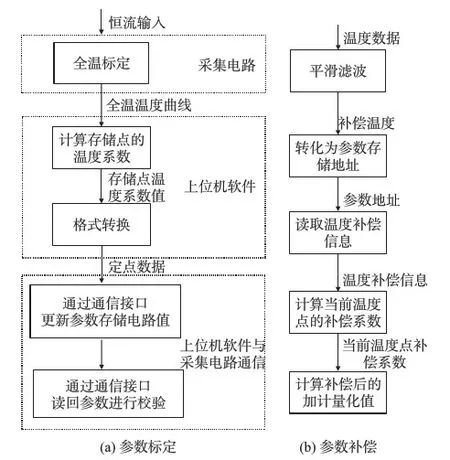
图5 参数标定和补偿流程图
4 试验结果
对采用该方案原理设计的采集电路进行实际性能测试,按照使用要求取10s累加值作为单位测试数据,全温测量范围为-55 ℃~+85 ℃,测试时采用高精度恒流源模拟加速度计输入电流,同时将测试电路置于温箱中,以准确测量采集输出随温度变化特性。
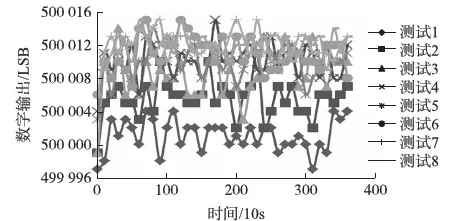
图6 年重复性测试数据
4.1 稳定性和重复性指标
测量采集电路的年逐次启动重复性和启动时间,测量重复性时确保每次测量环境温度在(30±5)℃,采集电路均采用冷启动,即必须保证关电时间大于30min,以准确检测启动时间的重复性,每月测量一次,共测量8次,每次测量时间1h,输入电流1.25mA,对应输出刻度系数为40 000LSBmA/s,X通路测试结果的数据拟合见图6所示,其横坐标10s为1点,纵坐标为输出数字量码值大小。
由图6测试结果,指标计算从第2点即20s开始计算,稳定性指标计算采用1h测量输出1б标准偏差除以其平均值计算,重复性指标计算采用多次测量输出平均值的1б标准偏差除以多次测量平均值计算,Y、Z通道计算方法相同,可得其采集电路稳定性指标小于5ppm,年重复性指标小于10ppm,已达到0.4nm/h高精度导航系统指标要求,且启动时间小于20s,满足系统快速对准使用要求。
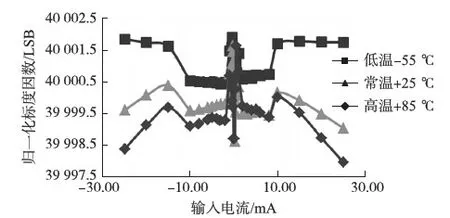
图9 全温标度因数非线性
4.2 零位和标度因数全温指标
将采集电路放于高低温箱中,分别测量其零位全温变化、标度因数全温变化以及全温下的标度因数非线性指标。零位测量时断开输入恒流源,标度因数温度系数测量时分别输入±1.25mA电流,非线性测量时输入电流序列,每单位测量点加激励1min,输入电流序列为:±0.1mA、±0.2mA、±0.3mA、±0.4mA、±0.5mA、±1.0mA、±2.0mA、±3.0mA、±4.0mA、±5.0mA、±6.0mA、±8.0mA、±10.0mA、±15.0mA、±20.0mA、±25.0mA。以X通道为例的数据测量结果分别如图7~图9所示。
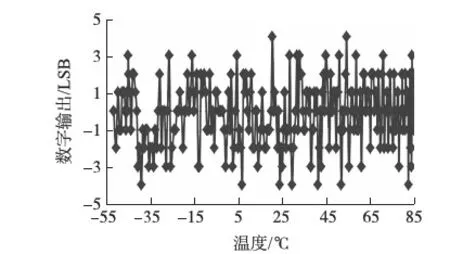
图7 全温零位变化
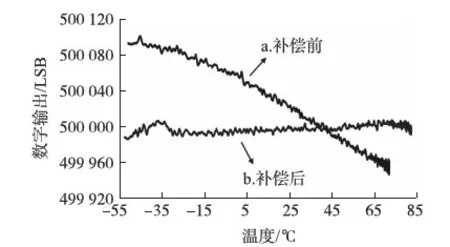
图8 标度因数全温变化(+1.25 mA)
由图7~图9测试结果,计算其相应指标值。零位全温变化均小于5LSB/10s,由标度因数设计值40 000LSBmA/s(1g输入为1.25mA)可得对应零位全温变化均小于10μg,标度因数温度系数小于0.5ppm/℃,补偿后的全温变化对于系统级使用可忽略,电路可作为独立可更换组件,无需系统级补偿,简化系统应用。标度因数非线性按照标准偏差法计算对应全量程输入下的归一化误差,可得在高温、低温、常温下其标度因数非线性指标均小于30ppm,满足系统使用要求。
4.3 变温速率对补偿效果的影响
由图7、图8计算可得采用本文的补偿方法可获得理想的全温特性指标,但由于实际系统的工作环境温度变化速率不同,需评估补偿方法对实际变温速率变化的适应性,以确定补偿算法的鲁棒性。这里根据实际系统使用环境要求,采集电路温度补偿建模采用1min1 ℃变温模型。验证测试分别采用1min1 ℃、2 ℃、3 ℃和实际系统变温曲线(1h15 ℃)4种温度模型进行验证,输入电流1.25mA,测试数据的拟合曲线见图10所示。由图10可得在不同变温速率下,采用该补偿模型的补偿结果均可达到0.5ppm/℃的标度因数温度系数指标。
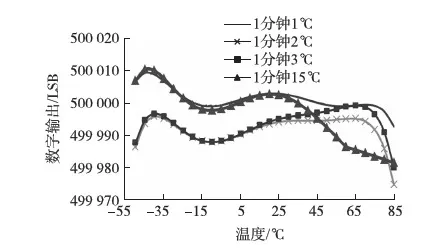
图10 不同变温速率的补偿效果
5 结束语
本文设计的高精度石英加速度计信号采集电路,采用了数字解决方案实现了采集电路的集成化、低功耗、数字化设计。另外采用数字自补偿方案将采集电路的零位和标度因数全温指标提高了一个数量级。实测数据表明该采集电路的启动时间小于20s,标度因数重复性达到10ppm、标度因数温度系数小于0.5ppm/℃、零位全温变化小于10μg,标度因数非线性小于30ppm,带宽大于1kHz,功耗仅为1.8W。该电路方案解决了传统I/F方案功耗大、启动时间长的问题,同时弥补了V/F方案I/V转换环节带来的零位偏置和温度系数大等问题,其综合性能满足轻小型化高精度捷联惯导系统和旋转调制系统的工程化应用要求。
[1] 刘智平,韩宗虎. 国外光学捷联惯导系统的技术现状和捷联惯导发展趋势[J]. 航天控制,2012,30(5):94-99.
[2] 鲍海阁,赵涛,王国臣,等. 捷联惯导高精度加速度计信号采集单元的设计与实现[J]. 传感技术学报,2011,24(1):53-58.
[3] Beitia J,Clifford A,Fell C,et al. Quartz Pendulous Accelerometers for Navigation and Tactical Grade Systems[C]//Inertial Sensors and Systems Symposium(ISS),2015 DGON. Karlsruhe:ISS,2015:1-20.
[4] AN/ASN-139(LN-92)Carrier-Based Aircraft Inertial Navigation System(INS)[DB/OL]. AVIC Digital Libary,2009:1-2.
[5] Chamberlin,Douglas A.Honeywell Inertial Systems for Interceptor Applications[C]//AIAA Guidance,Navigation,and Control Conference and Exhibit 2001.Montreal:AIAA,2000:5-6.
[6] Longstaff I,Ellms S,Goussak K,et al. The Litton LN-100 Advanced Technology Medium Accuracy Lightweight Inertial Navigation System[C]//AIAA Conference 1993.Hilton Head Island:AIAA,1993:1-5.
[7] 黄丽娟,邵志浩,郑永强,等. 加速度计I/F变换电路数字补偿方法[J]. 中国惯性技术学报,2014,22(4):547-551.
[8] 周璐,刘晴晴,谭新洪. 捷联惯导系统中加速度计的信号采集[J]. 航天控制,2014,32(2):18-22.
[9] 马佳智,段风阳,郭全. 惯性加速度计电流电压转换误差研究[J]. 计测技术,2012,32(5):41-46.
[10] 姜荣镇,张志鑫,朱红升,等. 电流积分器对I/F转换性能的影响分析[J]. 导航与控制,2011,10(1):62-67.
[11] 刘冬梅,万宝年,何怡刚,等. EAST中高精度长时间积分器系统的研究[J]. 计算机仿真,2013,30(11):246-250.
[12] Analog Devices,Inc. AD7606 16 bit,8 channel Simultaneous Data Acquisition ADC[S]. 2010:1-33.
[13] 郑长勇,陈军宁. 一种新型MEMS加速度计温度补偿方法研究[J]. 传感技术学报,2015,28(1):39-42.
[14] 俞舟平,叶凌云,李嘉鸿. 传感器信号采集电路启动时标度因数补偿研究[J]. 传感器与微系统,2013,32(9):28-34.
[15] 李汉舟,潘泉,王小旭,等. 温控和温补相结合的高精度激光惯性导航系统[J]. 中国惯性技术学报,2013,21(5):585-590.
Design of High-Precision Quartz Accelerometer Signal Acquisition Circuit
HAO Peng1*,ZHANG Wei2,CHENRui1
(1.Flight Automatic Control Research Institute,Xi’an 710065,China;2.Military Representative Office in the 206 Research Institute of China Aerospace Science and Industry Corporation,Xi’an 710065,China)
Based on the accelerometer signal acquisition requirement of the high precision strapdown inertial navigation system,this thesis proposes a new design scheme,which has the advantages of high precision,low power consumption and miniaturization. Meanwhile,digital compensation method is used to improve the precision of zero bias and scale factor in full temperature range by one order. Test data shows that the temperature coefficient of the circuit scale factor is below 0.5 ppm/℃,zero bias is below 10 μg in -55 ℃~+85 ℃ temperature range,and the scale factor repeatability of a year is below 10 ppm,power consumption is 1.8 W. The test results indicate that the circuit scheme meets the requirement of SINS.
strapdown inertial navigation system;accelerometer signal acquisition;digital compensation;scale factor

郝 鹏(1986-),男,陕西西安人,中航工业西安飞行自动控制研究所工程师,硕士,主要从事惯性传感器信号采集电路的设计研究,haopengbestman@126.com;

张 伟(1980-),男,陕西西安人,中国人民解放军驻航天210所军事代表室工程师,硕士。专业方向为计算机应用与技术;主要从事导航制导与控制;

陈 锐(1988-),男,陕西西安人,中航工业西安飞行自动控制研究所工程师,硕士,主要从事惯性传感器信号采集电路的设计研究。
2016-10-19 修改日期:2017-01-16
TH824.4
A
1004-1699(2017)05-0678-06
C:7230
10.3969/j.issn.1004-1699.2017.05.008
