碱金属气室无磁电加热技术研究与系统设计
2017-05-24郝杰鹏周斌权
郝杰鹏,周斌权
(1.惯性技术国家级重点实验室,北京 100191; 2.北京航空航天大学 仪器科学与光电工程学院,北京 100191)
碱金属气室无磁电加热技术研究与系统设计
郝杰鹏1,2,周斌权1,2
(1.惯性技术国家级重点实验室,北京 100191; 2.北京航空航天大学 仪器科学与光电工程学院,北京 100191)
基于量子精密测量的原子自旋陀螺仪具有高精度、小体积、低成本等优势,被认为是未来陀螺仪的发展方向;原子自旋陀螺仪的核心部件是承载原子自旋的碱金属气室;碱金属气室加热温度的稳定性是决定原子自旋陀螺仪精度和灵敏度的重要因素之一;同时,原子自旋陀螺仪的高灵敏度使其对磁场噪声极其敏感,因此要求加热过程不能引入额外的磁场干扰;针对以上要求,对原子自旋陀螺仪的无磁电加热技术进行了研究;设计并搭建了以Pt1000作为温度传感器,双层对称结构的加热膜作为加热元件,结合源测量单元、数据采集板卡、正弦波信号发生电路、驱动电路以及LabVIEW软件平台构成的无磁电加热系统;通过实验测试,本系统引入的等效干扰磁场优于15 fT/Hz1/2,气室温度短期稳定度优于±5 mK,长期稳定度优于±10 mK,为原子自旋陀螺仪的性能提升提供了可靠保障。
原子自旋陀螺仪;碱金属气室;无磁加热;磁场噪声;正弦波
0 引言
陀螺仪是惯性导航与制导技术的核心部件,陀螺仪的精度直接影响导航精度。近年来,随着人类对原子自旋所具有的精细能级结构和能级跃迁量子化等特点认识的不断深入,以原子自旋作为敏感介质的一些器件得到快速发展,人类获得了前所未有的精密测量能力[1-2]。原子自旋陀螺仪作为原子自旋器件的重要分支,被认为是未来高精度、小体积陀螺仪的发展方向[3-5]。
碱金属气室不仅是原子自旋陀螺仪的核心部件之一,而且也是承载原子自旋的敏感表头。依据原子自旋陀螺仪的工作原理,气室内的碱金属原子必须达到较高的密度,因此需要对气室进行高温加热,以达到要求的饱和蒸汽压[3]。不同碱金属所需的加热温度不同,通常为100~200℃之间[4-5]。碱金属气室温度的变化会导致原子弛豫以及检测信号强度随之变化,因而,为了保证原子自旋陀螺仪的性能,必须对碱金属气室的温度进行精准控制。原子自旋陀螺仪具有高灵敏度,对磁场噪声极其敏感,所以要求加热不能引入额外的干扰磁场[6]。因此,研究碱金属气室低磁场噪声,高稳定性的加热技术对提高原子自旋陀螺仪的性能意义重大。
国内外常用的加热方式气流加热、间断式电加热、高频电加热和激光加热等4种[7]。气流加热方式不会引入磁场干扰,但是温度稳定性不高,气流扰动较大,加热均匀性不好,且不易集成;间断式加热方式实现方式简单,但是需要加热和测量间断进行,不能连续测量,因此会影响测量带宽,且温度稳定性不高;激光加热方式也不会引入磁场干扰,但是出于安全考虑,加热功率一般不大,不适用于加热功率大的场合;高频电加热方式虽然实现方式较其它3种复杂,但其温控精度高,温度稳定性高,并且通过高频驱动和磁场抵消设计可基本消除由加热引入的磁场干扰[8]。
基于以上原因,设计的无磁电加热系统具有温控稳定性高,引入干扰磁场也低的特点。通过实验测试,该系统引入的等效干扰磁场优于15 fT/Hz1/2,碱金属气室加热温度短时间(2小时)内稳定在±5 mK,长时间(20小时)内稳定在±10 mK,为原子自旋陀螺仪的性能提升提供了可靠保障。
1 碱金属气室无磁电加热系统构成
根据原子自旋陀螺仪的工作要求设计的碱金属气室无磁电加热系统的结构框图如图1所示。
工作流程如下:温度传感器将碱金属气室的温度信号转换为电信号;源测量单元将包含温度信号的电信号采集并传送至LabVIEW软件平台;在LabVIEW软件平台计算出碱金属气室的温度,与设定温度比较,经PID控制算法处理得到温度控制量;传送温度控制量至多功能数据采集板卡;对应于控制量,多功能数据采集板卡输出-5~5 V的直流电压信号;该直流电压信号对正弦波信号发生电路生成的高频正弦波进行幅度调制;调制后的高频正弦波控制信号经加热膜驱动电路进行功率放大,驱动加热膜实现加热。

图1 无磁电加热系统结构框图
1.1 温度传感器选择与温度测量原理
铂热电阻具有测量精度高、长期稳定性好、测量范围大等诸多优点[9],符合碱金属气室温度测量对温度传感器的要求,因此铂热电阻适合作为碱金属气室温度测量传感器。使用铂热电阻测量温度时必定会有电流通入,根据毕奥-萨伐尔定律(Biot-Savart Law),导体有电流通过必然会引起磁场的变化。为了使温度测量引入的磁场变化尽可能小,应当尽量减小通入的测量电流。工业上常用的铂热电阻有Pt100和Pt1000等。Pt100的电阻变化率为0.3851Ω/℃,而Pt1000的电阻变化率为3.851Ω/℃。显然,在相同的电流激励情况下,变化相同的环境温度,Pt1000对应的电信号变化量远大于Pt100。因此,在相同的测量精度下,使用电阻变化率较大的Pt1000作为温度传感器可以使通入的电流更小。为了避免铂热电阻自身剩磁引入磁场干扰,使用了定制的接线端无磁性的薄膜铂热电阻Pt1000作为碱金属气室温度传感器。
将铂热电阻的电阻值转换为电压信号的方式通常有两种:电桥法和恒流源法。采用电桥法转换得到的电压信号与铂热电阻阻值的变化呈非线性关系,从而使测温算法变得复杂。此外,电桥法需要匹配多个电阻,因而会在测量中引入系统误差。恒流源法转换得到的电压信号与铂热电阻阻值的变化呈线性关系,从而可以实现更高的温度测量精度[10]。除此之外,利用恒定电流测量,温度测量过程引入的干扰磁场是一个恒定的磁场,而恒定磁场可以采用主动磁补偿技术将其消除[11]。基于以上两点原因,选用了恒流源法进行铂热电阻测量信号的转换。
由前文可知,碱金属气室加热温度的稳定度直接决定了原子自旋陀螺仪的性能。为了实现加热温度控制的高稳定性,温度测量部分必须有足够高的分辨率,如此才能敏感到尽可能小的温度变化,进而对温度变化迅速做出调整。为了保证温度测量的高分辨率,选用了具有高精度、高分辨率、高稳定性的源测量单元(SMU)与铂热电阻Pt1000构成碱金属气室温度测量模块,温度测量模块原理示意图如图2所示。

图2 温度测量模块原理示意图
使用源测量单元对铂热电阻阻值进行精确测量,引入误差最小的方案是4-线感测方式。因此,需要将源测量单元配置为电流源和电压测量(IS&VM)模式,即源测量单元的四个端子中,两个端子配置为恒流源输出,用以激励铂热电阻;两个端子配置为电压测量功能,用以精确测量在恒流源激励下的铂热电阻两端的电压值。铂热电阻的阻值为铂热电阻两端的电压值与恒流源电流值的比值。根据铂热电阻阻值与温度的转换函数即可计算出当前碱金属气室的温度。
将源测量单元输出的铂热电阻激励电流设置为100 μA(激励电流越小,引入的磁场干扰就越小),将电压测量的量程设置为1 V。此时,源测量单元电压测量的分辨率为1 μV,对应于电阻测量的分辨率为1 μV/100 μA=0.01 Ω。因铂热电阻Pt1000的电阻变化率为3.851 Ω/℃,所以可以得出,采用的测温方法的温度测量分辨率优于2.6 mK。
1.2 加热器设计与制作
电加热的主要工作部件是电加热丝,加热电流驱动电加热丝产生热量。然而,在加热电流通过电加热丝时,势必会引起磁场的改变,进而导致原子自旋陀螺仪物理表头的测量灵敏度下降。为了减小由电加热引入的干扰磁场,通常将电加热丝布置为平行邻近形式,并固定到耐高温材料基底上,形成加热薄膜,结构示意图如图3(a)所示。在平行并且邻近的加热丝中,通过的电流大小相等、方向相反,因此会产生大小相等、方向相反的磁场,从而实现磁场相互抵消,进而达到减小干扰磁场的效果。为了进一步减小干扰磁场,还可以将加热丝对称地固定到加热薄膜的上下层,形成双层结构,结构示意图如图3(b)所示。由于加热膜层间距离很小,因此干扰磁场相互抵消效果明显。双层对称结构的加热膜可以实现同层磁场相消和层间磁场相消的双重效果[12]。
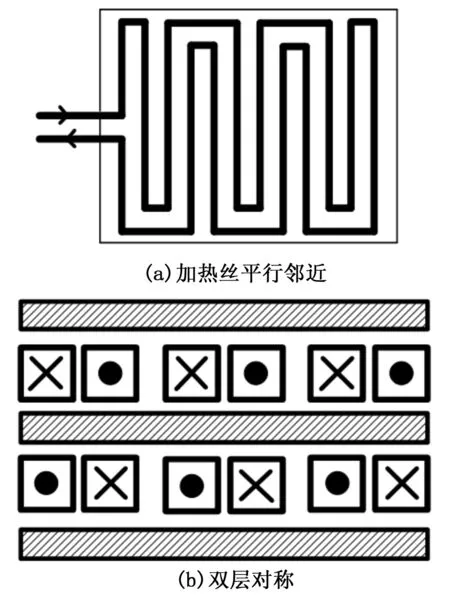
图3 双层对称结构电加热膜示意图
根据以上磁场相消原理设计并制作的双层对称结构的电加热膜如图4所示,其采用耐高温材料作为基底,无磁的镍铬合金丝作为电加热丝,加热膜的阻值约为150 Ω。
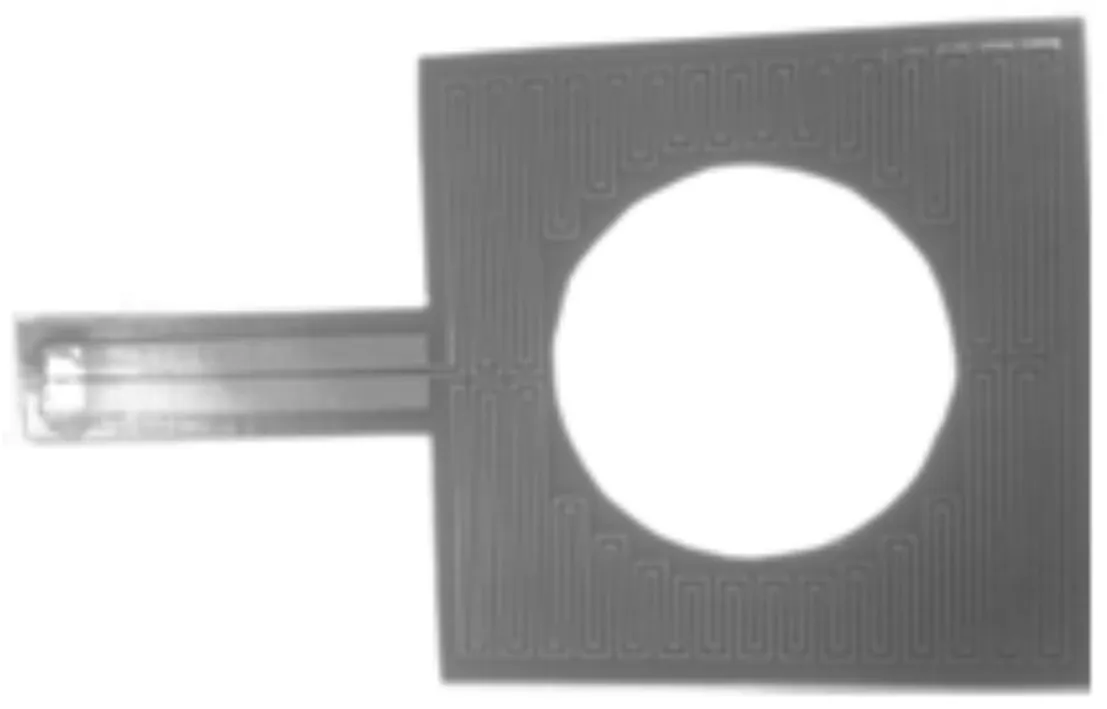
图4 双层对称结构电加热膜
1.3 温度控制方法与实现
无磁电加热系统采用简单可靠的PID控制方法,由LabVIEW软件平台中的PID控制工具包结合多功能数据采集板搭建而成。
无磁电加热系统控制模块的PID控制器由LabVIEW PID控制工具包提供的PID.vi、PID Advanced.vi、PID Autotuning.vi等虚拟仪器(VI)搭建而成。PID控制器采用Ziegler-Nichols整定方法,可以快速、精确的算出控制参数,之后只需进行微调便可得到理想的控制效果[13]。
选用的多功能数据采集板卡具有同步模拟输入、模拟输出、数字I/O、计数器/定时器等诸多功能,用到的是其模拟输出功能。数据采集板卡的模拟输出范围为-5~5 V,精度为1.526 mV,更新速率高达3.33 MS/s。
控制部分工作流程如下:源测量单元根据铂热电阻的测量电压与驱动电流的比值,计算出铂热电阻的阻值,通过铂热电阻阻值与温度的转换函数可以得到当前碱金属气室的温度,将温度值转换为设定工程范围内占的百分比,作为PID模块的系统反馈值(process variable);碱金属气室的设定加热温度由LabVIEW前面板的输入控件设定,同样将温度值转换为设定工程范围内占的百分比,作为PID模块的实际期望值(setpoint);同时,设定Kp、Ki、Kd以及微分时间等PID控制参数;将PID模块的输出值由百分比转换为实际数值,此数值即为PID控制模块的控制量,该控制量经过数据采集板卡输出-5~5 V的直流电压信号。
1.4 加热信号选择与产生电路
为了最大程度地降低由加热引入的磁场干扰对原子自旋陀螺仪性能产生影响,采用了高频交流电信号对加热膜进行驱动。高频交流加热电流的频率远离气室内碱金属原子、惰性气体核子的进动频率和原子自旋陀螺仪的动态范围,因而加热电流产生的高频磁场不会被原子自旋陀螺仪表头敏感,进而避免了加热装置对原子源造成磁场干扰[14]。
通常,大多数加热系统采用的加热信号为方波信号,然而方波频率成分复杂,含有丰富的高次谐波,因而容易对原子自旋陀螺仪的检测信号产生串扰,增大检测信号的噪声,进而对原子自旋陀螺仪的精度和灵敏度造成影响。因此,对加热信号进行了重新选择,选用高频正弦波信号作为加热信号。正弦波的频率成分单一,不会对原子自旋陀螺仪的检测信号产生串扰,因而不会影响原子自旋陀螺仪的精度和灵敏度。
高频正弦波信号由正弦波信号发生电路产生,该电路的核心器件为DDS芯片AD9834,输出正弦波的频率高达37.5 MHz,分辨率最低为4 mHz,幅度由外部信号源对其进行调制。选用的正弦波信号的频率为80~110 kHz,幅度由数据采集板卡输出的直流电压控制信号对其进行调制。
1.5 加热膜驱动电路设计
使用不同碱金属原子源的原子自旋陀螺仪对碱金属气室的温度有不同的要求,例如,使用Rb-87碱金属的核磁共振原子自旋陀螺仪工作时碱金属气室的温度约为100 ℃左右,使用K-Rb混合碱金属的SERF原子自旋陀螺仪工作时碱金属气室的温度约为200 ℃左右。经实验测试,加热膜将碱金属气室加热到100 ℃需要正弦波的峰峰值达到80 Vpp,加热到200℃需要正弦波的峰峰值达到140 Vpp。然而,信号发生电路输出的正弦波的幅值在1 V以内,不足以驱动加热膜将碱金属气室加热到所需温度。因此,信号发生器输出的高频正弦波信号必须经加热膜驱动电路进行功率放大。
由于驱动加热膜的正弦波信号电压高达140 Vpp,频率高达100 kHz左右,因此驱动电路的功率放大芯片需满足高输出电压、高增益带宽和高压摆率等要求。选用了由APEX公司生产的高电压、大带宽的MOSFET功率放大芯片PA96。PA96功率放大芯片的输出电压可以高达300 V,输出电流最大可以达到1.5 A,增益带宽可以达到175 MHz,压摆率可以达到250 V/μs,完全满足要求。
加热膜驱动电路的原理图如图 5所示。在运算放大器的正负输入端接上两对二极管,可有效钳制住差分输入电压,防止差分输入电压过大导致输入偏置电流变大,损毁运算放大器。输出端反向接两个快速恢复二极管起到过流保护和过压保护的作用。
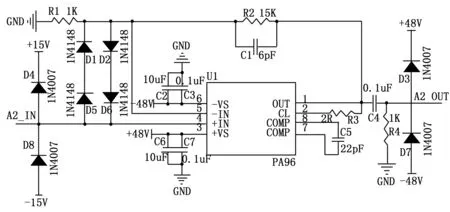
图5 加热膜驱动电路原理图
2 测试实验与结果
原子自旋陀螺仪对碱金属气室无磁电加热系统的要求是引入干扰磁场低,温控稳定性高,因此从加热系统磁场噪声和温度性能两方面进行了测试实验。
2.1 碱金属气室无磁电加热系统磁场噪声测试实验
由于采用了双层对称结构的电加热膜,并且加热信号采用高频正弦波,因此由加热引入的干扰磁场相当微弱,导致不能使用常规的磁力测量仪器进行测量。国内外通常采用对比电加热装置工作与关闭状态下原子自旋陀螺仪性能指标的方式间接评估加热引入的干扰磁场。在超高灵敏SERF原子自旋磁场测量平台上进行了碱金属气室无磁电加热系统磁场噪声测试实验。首先将测试电加热装置在正常工作状态时SERF原子自旋磁场测量平台的灵敏度,然后关闭电加热装置,在温度没有明显降低的短时间内再次对灵敏度进行测试,对比两者之间的差异。经过评估,采用的碱金属气室无磁电加热系统引入的磁场噪声优于15 fT/Hz1/2。
2.2 碱金属气室无磁电加热系统温度性能测试实验
在核磁共振原子自旋陀螺仪样机和SERF原子自旋陀螺仪样机上进行了碱金属气室无磁电加热系统温度性能测试实验。将核磁共振原子自旋陀螺仪的碱金属气室的温度设定为100℃,将SERF原子自旋陀螺仪的碱金属气室的温度设定为200℃,分别采集了两种原子自旋陀螺仪碱金属气室到达设定温度后的短时间(2小时)温度数据和长时间(20小时)温度数据。由图6中的实验数据可以看出,采用碱金属气室无磁电加热系统的两种原子自旋陀螺仪碱金属气室在各自的设定温度可以实现±5 mK的短时稳定度和±10 mK的长时稳定度。

图6 无磁电加热系统温度性能测试实验结果
3 结论
以Pt1000作为温度传感器,双层对称结构的加热膜作为加热元件,结合源测量单元、数据采集板卡、信号发生器、驱动电路以及LabVIEW软件平台搭建了温控稳定性高,引入干扰磁场低的碱金属气室无磁电加热系统。通过实验测试,本系统引入的等效干扰磁场优于15 fT/Hz1/2,气室温度短期稳定度优于±5 mK,长期稳定度优于±10 mK,为原子自旋陀螺仪的性能提升提供了可靠保障。
[1] Zou S, Zhang H, Chen X Y, et al. A Novel Calibration Method Research of the Scale Factor for the All-optical Atomic Spin Inertial Measurement Device[J]. Journal of the Optical Society of Korea, 2015,19(4):415-420.
[2] Fang J C, Chen Y, Zou S, et al. Low frequency magnetic field suppression in an atomic spin co-magnetometer with a large electron magnetic field[J]. Journal of Physics B: Atomic, Molecular and Optical Physics, 2016,49(6):65006.
[3] 万双爱. 基于SERF的原子自旋陀螺仪自旋耦合控制方法及实验研究[D]. 北京:北京航空航天大学,2014.
[4] Dang H B, Maloof A C, Romalis M V. Ultrahigh sensitivity magnetic field and magnetization measurements with an atomic magnetometer[J]. Applied Physics Letters, 2010,97(15):151110.
[5] Ledbetter M P, Savukov I M, Acosta V M,et al. Spin-exchange-relaxation-free magnetometry with Cs vapor[J]. Physical Review A,2008,77(0334083):3.
[6] Lu J X, Qian Z, Fang J C, et al. Suppression of vapor cell temperature error for spin-exchange-relaxation-free magnetometer[J].Review of Scientific Instruments,2015,86(0831038).
[7] Liu G B, Li X F, Sun X P, et al. Ultralow field NMR spectrometer with an atomic magnetometer near room temperature[J]. Journal of Magnetic Resonance,2013, 237:158-163.
[8] Hyunjoon Lee, Kiwoong Kim, Seong-Joo Lee, et al. Development of spin-exchange relaxation free magnetometer with a compact heating system[J].ACTA IMEKO, 2013, 2(1):16-20.
[9] 罗 毅,施云波,渠立亮,等. 谐波分析及交流比较的高空温度探测方法研究[J]. 仪器仪表学报, 2014, 35(4):721-729.
[10] 温江涛,焦书浩,杨文明. 基于铂电阻的宽量程高精度温度测量装置[J]. 电子测试, 2013,(12):27-28.
[11] Georgios Vasilakis. Precision measurements of spin interactions with high density atomic vapors[D]. Princeton University,2011.
[12] Michael Bulatowicz. Electrical Resistive Heaters for Magnetically Sensitive Instruments[M]. Bulletin of the American Physical Society,2014: 1172.
[13]朱坚民,沈正强,李孝茹,等. 基于神经网络反馈补偿控制的磁悬浮球位置控制[J]. 仪器仪表学报, 2014, 35(5):976-986.
[14] Justin Matthew Brown. A New Limit on Lorentz- and CPT-Violating Neutron Spin Interactions Using a K-3He Comagnetometer[M].2011.
Study on Non-magnetic Heating Technology and System for Alkali Vapor Cells
Hao Jiepeng1,2, Zhou Binquan1,2
(1.National Key Laboratory of Inertial Technology, Beijing 100191,China; 2.School of Instrument Science and Opto-electronics Engineering, Beihang University, Beijing 100191,China)
The atom spin gyroscope based on quantum precision measurement has the advantages of high accuracy, small size and low cost, which is considered to be the future development direction of the gyroscope. The core component of atomic spin gyroscope is the alkali vapor cell carrying the atom spin. The stability of the alkali vapor cells heating temperature is one of the important factors to determine the accuracy and sensitivity of atomic spin gyroscope. Meanwhile, the ultra-high sensitivity of the atomic spin gyroscope makes it extremely sensitive to magnetic field noise, so it should avoid introducing additional magnetic field interference by the electronic heater. For the above requirements, the non-magnetic heating system with high stability of temperature control and low interference magnetic is designed and optimized. A non-magnetic electric heating system consisting of temperature sensor Pt1000, film heater, SMU, DAQ card, sine wave generating circuit, driving circuit and the LabVIEW software platform, is established. The test results show that the equivalent interference magnetic field is within 15 fT/Hz1/2, the short-term stability of the alkali vapor cells temperature is ±5 mK, and the long-term stability is ±10mK, which provides reliability for the performance promotion of atomic spin gyroscope.
atomic spin gyroscope; alkali vapor cells; non-magnetic heating; magnetic field noise; sine wave
2016-11-25;
2017-01-05。
国家自然科学基金资助项目(61227902,61374210,61121003);国家高技术研究发展计划(863计划)(2014AA123401)。
郝杰鹏(1990-),男,河北石家庄人,硕士研究生,主要从事原子自旋陀螺仪方向的研究。
1671-4598(2017)05-0180-04
10.16526/j.cnki.11-4762/tp.2017.05.050
V241.62
A
