基于iGPS的飞机部件对接技术研究*
2017-05-16陈良杰孙占磊景喜双宋彰桓
陈良杰, 孙占磊, 景喜双, 宋彰桓, 赵 罡
(1.北京航空航天大学大型飞机高级人才培训班,北京 100191;2.北京航空航天大学机械工程及自动化学院,北京 100191)
装配在飞机的制造过程中约占整个工作总量的40%~50%,装配质量直接影响飞机的最终性能[1]。飞机部件对接是装配的重要环节,对接的效率会影响整机装配效率,对接质量则会直接影响整机性能,数字化测量技术是提高飞机部件对接效率和质量的有效途径[2-3]。
iGPS(indoor GPS)能多点同时测量,扩展性好,能提供飞机部件实时性和全局性的测量信息,是解决飞机自动化装配领域数字化测量和定位问题的新型方案。目前,国外航空制造企业已经把iGPS作为飞机自动化装配平台上的测量手段之一,显著提高了飞机装配效率。美国波音公司在787装配平台上,使用iGPS作为总装线的测量手段[4];欧洲空客公司将iGPS应用在柔性装配工装定位和部件对接等方面。国内飞机制造企业如哈飞、成飞和陕飞等陆续引进了iGPS测量系统,但目前研究集中在iGPS的性能测试及辅助测量,还未形成较为系统的应用方案,尤其在飞机部件对接中,iGPS的应用研究才刚刚开始。
针对iGPS的应用现状,结合其测量特点和飞机自动化装配需求,本文提出基于iGPS的飞机部件对接系统,分析系统的主要组成部分和工作原理,提出系统所面临的关键技术难点,并根据现有算法给出相应的解决方法。通过装配现场ARJ21翼身对接实例,证明基于iGPS的飞机部件对接系统能为飞机自动化装配领域提供便捷的、自动化程度较高的对接方案。
基于iGPS的飞机部件对接系统
iGPS由激光发射器、iProbe、固定式探测传感器(Vector-bar)、标准杆(Scale-bar) 、移动工作站和数据处理软件(Surveyor)等部分组成,通过前方角度交会原理确定物体空间位置[5]。iGPS测量精度高、动态跟踪性能好、能多点同时测量,特别适用于飞机自动化装配领域(图1)。
基于iGPS的飞机部件对接系统,是解决飞机部件自动化装配的新型方案。系统由iGPS测量系统,飞机部件对接调姿软件系统和部件调姿控制系统3部分组成。iGPS测量系统实时采集部件位置姿态信息,然后把测量信息传递给飞机部件对接调姿软件系统。软件系统通过坐标系统一算法,把测量坐标系统一到设计坐标系,接着根据部件位姿标定算法,解算部件的实时位置姿态,然后进行部件调姿轨迹规划,并将调姿轨迹规划结果发送至部件调姿控制系统,最后通过部件调姿控制系统控制调姿定位器进行部件调姿,如图2所示。
由此可见,基于iGPS的飞机部件对接有以下5个关键步骤(图3):
(1)飞机部件对接调姿软件与iGPS数据处理软件进行实时通讯,对接调姿软件获取部件的位置姿态信息;
(2)采用高效的坐标系统一算法,把iGPS测量坐标系统一到设计坐标系下;
(3)采用部件位姿标定算法,根据部件理论坐标值和当前坐标值,解算出部件的位置姿态,获取调姿驱动器接头球心当前坐标;
(4)比对调姿驱动器接头球心当前坐标与理论坐标关系,进行部件调姿轨迹规划,解算出调姿驱动器各驱动轴运动增量;
(5)飞机部件对接调姿软件把调姿轨迹规划结果发送到部件调姿控制系统。
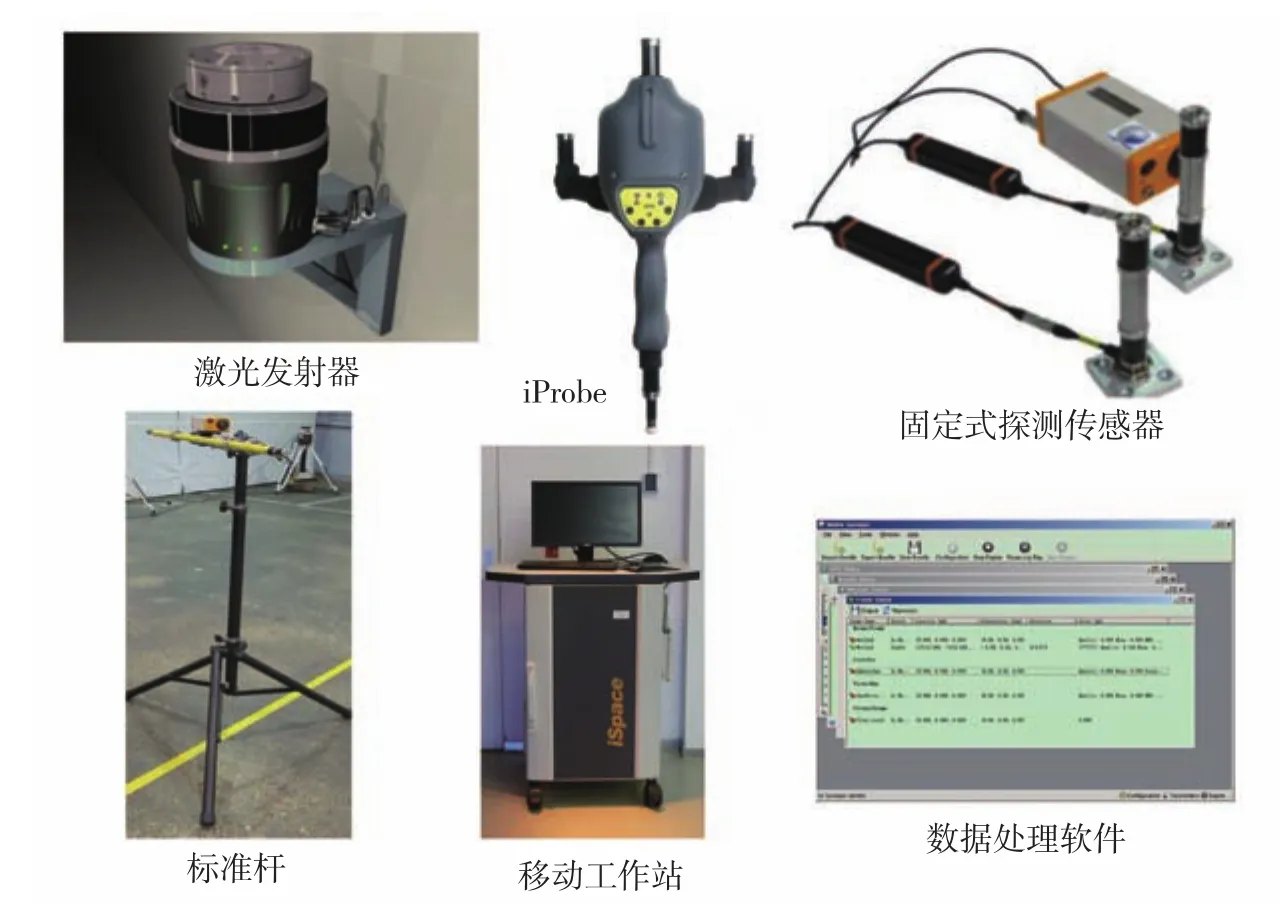
图1 iGPS系统组成Fig.1 Composition of iGPS system

图2 基于iGPS的飞机部件对接系统Fig.2 iGPS-based aircraft components docking system
关键技术及解决方法
1 iGPS测量数据实时获取技术
iGPS的数据处理软件Surveyor能采集部件的测量信息,但是不方便对数据进行直接处理。基于iGPS的飞机部件对接系统要求飞机部件对接调姿软件能实时获取部件的位置姿态信息用于部件位姿比对和调姿轨迹规划,因此需要研究iGPS测量数据实时获取技术,对Surveyor进行二次开发,保证对接调姿软件能同步获取Surveyor采集到的测量信息。
Surveyor提供了编程接口PI(Programming Interface),包括 Metris.Common.Communication.dll 、Metris.Common.Mathematic.dll、Metris.Core.dll、Metris. Surveyor.Client.dll和Metris.Surveyor.Common.dll 5个动态链接库[6]。对接调姿软件通过调用这些动态链接库,可以获得部件各测量点的空间位置信息。
2 基于罗德里格斯矩阵的坐标系统一技术
飞机部件对接现场涉及iGPS测量坐标系和设计坐标系,为了保证部件对接有效地进行,需要把测量坐标系统一到设计坐标系下,如图4所示。
目前,国内飞机制造厂在进行坐标系转换时通常采用欧拉角来描述旋转矩阵。通过高斯-牛顿法求解旋转矩阵未知参数,求解过程需要选取迭代初始参数,涉及泰勒级数展开,计算复杂,计算量大。基于罗德里格斯矩阵的坐标系转换算法可避免三角函数带来的非线性方程求解问题,计算速度快、精度高,可以满足飞机对接坐标系统一需求[7-8]。

图3 基于iGPS的飞机部件对接流程Fig.3 iGPS-based aircraft components docking procedure
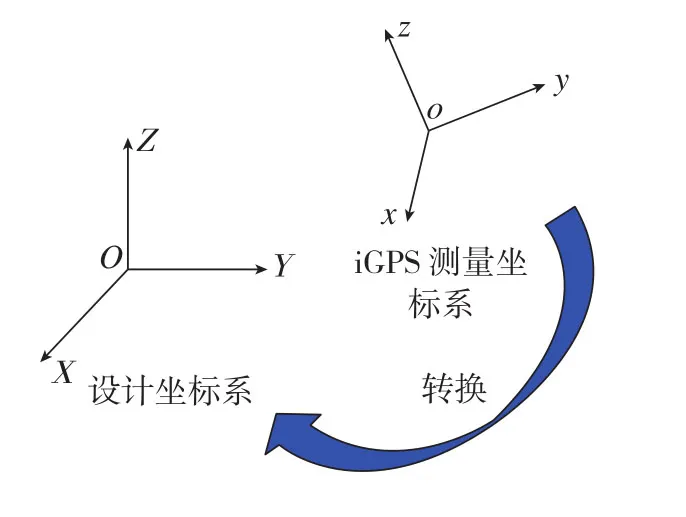
图4 坐标系转换Fig.4 Coordinate system conversion
飞机部件对接现场通常需要选取公共基准点进行坐标系转换。由于飞机在对接过程变形很小,其变形量与其尺寸相比可以忽略不计,因此不存在等比缩放情况,此时可取比例缩放因子λ=1。假设某一公共基准点在测量坐标系下的坐标是(xa,ya,za)T,在设计坐标系下的坐标是(xb,yb,zb)T,那么它们的转换关系为:

式中,

式中,S是反对称矩阵[9]:

由式(2)、(3)可得:

因此,可以通过求解参数a,b,c解算罗德里格斯矩阵R。
对坐标参数进行重心化处理后,结合式(2)、(3)可得到:
式中,和是公共点经重心化处理后的坐标值。
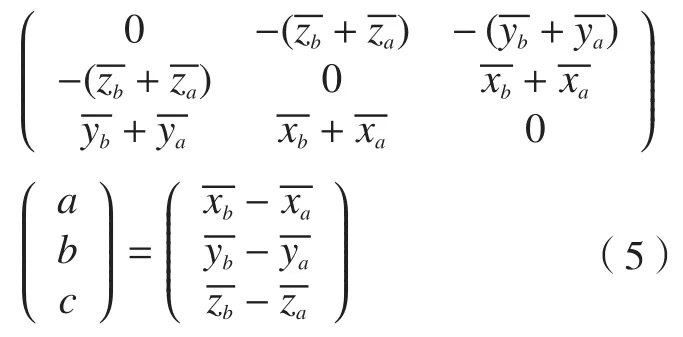
飞机部件对接现场公共基准点数目一般大于3个,此时式(5)可展开成式(6):

式中,是公共基准点经重心化处理后的测量坐标值,是公共基准点经重心化处理后的设计坐标值。
利用最小二乘原理即可求得式(6)中a、b、c的参数值,进而可求得罗德里格斯矩阵R和实现测量坐标系与设计坐标系的统一。
3 基于加权单位四元数的位姿比对技术
飞机部件对接过程涉及位姿比对点和调姿驱动点的测量。调姿驱动点一般是指调姿驱动器接头球心坐标,理论值可知,但不方便测量,因此需根据位姿比对点的当前坐标值和理论坐标值的关系,求解出调姿驱动点的当前坐标信息,为部件调姿轨迹规划提供初始数据。
求解位姿比对点当前坐标值和理论坐标值的关系,即求解这两种坐标值的空间变化关系。采用加权的单位四元数的点集配准算法,可以保证点集在坐标系变换前后各点空间位置关系不变,即保持点集的空间关系的一致性。由于各测量点在飞机部件上的位置不同,其关键程度和容差范围不同,引入加权系数,可以对调整各测量点的关键程度。
设位姿比对点集的当前测量值为B={bi},理论坐标值为A={ai},i=1,2,…,n,则:

式中,R为旋转变换矩阵,T为平移向量。
用单位四元数描述上对面人问题[10],根据刚体空间位姿的单位四元数描述法,设旋转变换向量为单位四元数qR=(q0q1q2q3)T,其中;平移变换向量为则旋转矩阵R为[11]:

最优旋转变换单位四元数qR可由以下方法求得[12]:
(1)计算点集加权质心:

(2)构造协方差矩阵:
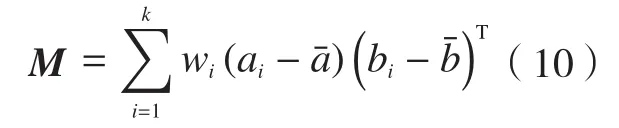
构造反对称矩阵Q=M-MT。
(3)构造4×4矩阵:

式中,Δ=(Q23Q31Q12)T。
(4)计算N的最大特征值及其对应的特征向量u,则qR=u。由式(8)计算旋转矩阵R。

(5)计算平移向量:根据上述空间变换关系,即可根据调姿驱动点的理论坐标值,求得其当前坐标值。
4 部件调姿轨迹规划技术
飞机部件对接现场,每个部件由多台调姿定位器支撑。根据部件的形状和结构特点,机翼部件通常采用3台调姿定位器支撑方案,机身部件采用4台调姿定位器支撑方案[13]。如图5所示,针对机翼的半轴方案3-2-1,根据调姿驱动点的当前坐标信息和理论坐标信息,可采用“三点调姿法”策略对3台定位器驱动轴的运动增量进行计算。调姿方案为:
(1)调整调姿驱动点A关联的3个驱动轴,使点A到达目标值,此时点B、点C随点A做平移运动。
(2)点A到位后固定其关联的3个驱动轴。调整点B关联的两个驱动轴(y/z),使点B的y、z坐标到达目标值,由于约束关系,点B的x坐标也会到达目标值,此时点C随点B平移运动。
(3)点B到位后固定其关联的两个主动轴。调整点C关联的主动轴(z),使点C的z坐标到达目标值,由于约束关系,点C的x、y坐标也会到达目标值。
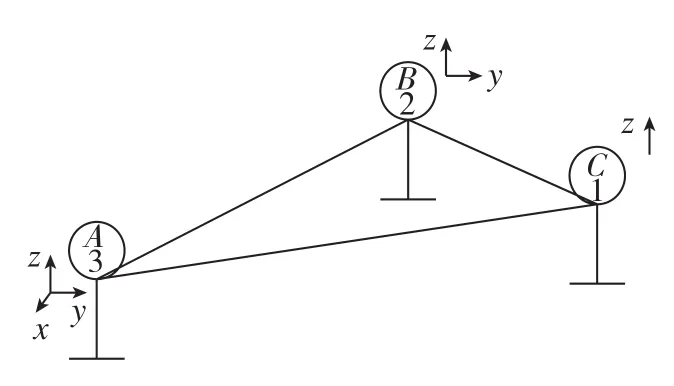
图5 机翼半轴支持方案3-2-1Fig.5 Half axle support scheme"3-2-1" of aircraft wing
至此机翼部件调整到位。“三点调姿法”控制6个自由度,与部件自由度数目一致。调姿规划过程只需计算各驱动轴增量,计算量少,降低了调姿定位器轨迹规划难度,提高对接效率。
机身部件4台调姿定位器支撑方案,可采用半轴方案3-2-1-1来解决,方法与机翼部件调姿方法相似。
5 飞机部件对接调姿软件与调姿控制系统通讯技术
ARJ21飞机对接过程使用西门子Simotion系列运动控制器对调姿定位器各驱动轴电机进行控制。飞机部件对接调姿软件需要将各驱动轴运动增量按照一定的数据格式发送给调姿控制系统。根据西门子Simotion P350运动控制器与上位机的通信方法,可采用TCP/IP协议,使用套接字(Socket)接口进行编程,将各驱动轴运动增量发送到调姿控制系统。
装配现场关键技术应用试验
由于iGPS测量数据实时获取技术、飞机部件对接调姿软件与调姿控制系统通信技术主要涉及编程开发,因此在ARJ21飞机部件对接现场,主要针对基于罗德里格斯矩阵的坐标系统一技术、基于加权单位四元数的位姿比对技术和部件调姿轨迹规划技术,进行现场应用试验(图6) 。

图6 ARJ21翼身对接现场Fig.6 Wing-fuselage docking site of ARJ21
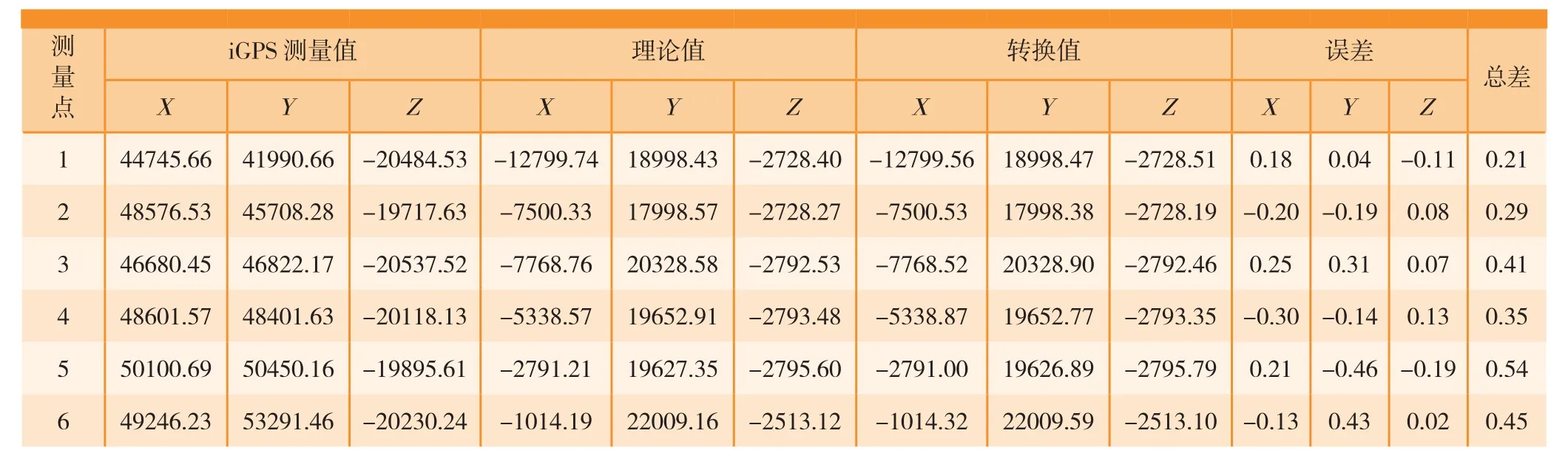
表1 公共基准点坐标值mm
1 坐标系统一算法现场验证
装配现场公共基准点的理论坐标值、iGPS测量坐标值及坐标系转换情况如表1所示。
从表1转换结果可以看出,转换值与理论值的总差最高为0.54mm,平均约为0.37mm,基本满足对接需求的0.5mm精度。但坐标系转换误差大于iGPS的测量精度0.2mm,造成这一结果主要有两个原因:现场测量时正在进行钻铆作业,其振动影响测量精度;基准点长时间未校核,其实际位置与历史记录的理论值存在出入。综合来看,基于罗德里格斯矩阵的坐标系统一技术,可以实现装配现场iGPS测量坐标系与设计坐标系的统一。
2 部件位姿比对算法现场验证
由于现场ARJ21飞机翼身已完成对接,不能实现真正意义上的对接过程测试,但是采用本文的部件位姿比对算法和调姿轨迹规划算法仍能对部件对接过程进行算法可行性的验证。此时调姿驱动点理论值与当前值的误差满足装配精度要求,即可验证位姿比对算法的可行性。
按照上飞厂已有方案选取右侧机翼下表面的点 11#、13#、14# 作为位姿比对点,选取点 9#、10#、12#点作为驱动点,各点理论值已知,位置如图7所示。其中点 11#、13#、14#当前坐标值由iGPS测量系统获得,点9#、10#、12#当前坐标值由位姿比对算法求得。
位姿比对点的当前坐标值和理论坐标值如表2所示。
由于实例中位姿比对点的位置相近、功能类似,不妨设定权重系数都为1/3,然后通过基于加权单位四元数的位姿比对技术,根据调姿驱动点的理论坐标值,解算其当前坐标值,结果如表3所示。从表3结果来看,调姿驱动点的理论坐标值与当前坐标值误差最大为0.30mm,最小为0.10mm,符合对接完成的精度要求,部件位姿比对技术可以解算出调姿驱动点的当前坐标值。
3 部件调姿轨迹规划算法现场验证
根据表3驱动点当前坐标值与理论坐标值,采用“三点调姿法”解算调姿定位器各驱动轴的增量,结果如表4所示。

图7 位姿比对点与调姿驱动点位置Fig.7 Position of pose alignment points and attitude -adjusting driving points

表2 位姿比对点坐标值情况

表3 调姿驱动点坐标值情况 mm

表4 调姿定位器各驱动轴的增量 mm
由于机身移动、装配过程工艺协调等多种因素的干扰,即便是对接完成的机体其实际位姿与理论位姿也会存在差异。从表4的结果来看,本次试验可以验证部件调姿规划算法在装配现场的可行性。
结束语
针对iGPS的测量特点,结合飞机部件对接现场需求,对基于iGPS的飞机部件对接系统进行介绍和分析,重点解决了坐标系统一问题、部件位置姿态比对问题和部件调姿轨迹规划问题。
通过ARJ21飞机部件对接现场的算法应用试验得出:
(1)采用基于罗德里格斯矩阵的坐标系转换算法,可以实现iGPS测量坐标系向设计坐标系的统一。坐标系统一后,公共基准点转换值与理论值的总差最高为0.54mm,平均约为0.37mm,基本满足对接需求精度0.5mm。
(2)采用基于加权单位四元数的位姿比对技术,可以解算调姿驱动点的当前坐标值。
(3)采用“三点调姿法”,根据调姿驱动点的当前坐标值与理论坐标值关系,进行部件调姿轨迹规划,解算调姿定位器各驱动轴的增量。
参 考 文 献
[1]许国康.大型飞机自动化装配技术[J].航空学报,2008,29(3):734-740.XU Guokang. Automatic assembly tchnology for large aircraft[J]. Acta Aeronautica et Astronautica Sinica,2008,29(3):734-740.
[2]范玉青.飞机数字化装配技术综述[J].航空制造技术,2006(10):44-48.FAN Yuqing. Digital assembly for aircraft[J].Aeronautical Manufacturing Technology,2006(10):44-48.
[3]黄翔, 李泷杲, 陈磊, 等.民用飞机大部件数字化对接关键技术[J].航空制造技术,2012(3):54-56.HUANG Xiang, LI Shuanggao, CHEN Lei,et al. Key technologies of digital final assembly for civil aircraft[J]. Aeronautical Manufacturing Technology,2012(3):54-56.
[4]EVERETT. Advanced integration technology. Boeing 787 final assembly[EB/OL].http://www.aint.com/project_details.php?id=7,2012.
[5]FRANCESCHINI F, GALETTO M,MAISANO D, et al. Distributed large-scale dimensional metrology[M]. London: Springer,2011.
[6]康海东, 范百兴, 李宗春,等. iGPS测量原理及其精度分析[J]. 测绘通报,2012(3):12-15.KANG Haidong, FAN Baixing, LI Zongchun,et al. iGPS measurement principle and precision analysis[J]. Bulletin of Surveying and Mapping,2012(3): 12-15.
[7]张卡, 张道俊, 盛业华, 等. 三维坐标转换的两种方法及其比较研究[J].数学的实践与认识,2009,38 (23): 121-128.ZHANG Ka, ZHANG Daojun, SHENG Yehua, et al. Research on two methods of three dimensional coordinate transformation and their comparision[J]. Mathematics in Practice and Theory,2009,38(23): 121-128.
[8]姚吉利, 韩保民, 杨元喜.罗德里格矩阵在三维坐标转换严密解算中的应用[J].武汉大学学报: 信息科学版,2007,31(12):1094-1096.YAO Jili, HAN Baomin, YANG Yuanxi.Applications of Rodrigues matrix in 3D coordinate transformation[J]. Geomatics and Information Science of Wuhan University,2007,31(12):1094-1096.
[9]金为铣.罗得里格斯坐标变换矩阵的推证 [J].测绘通报,1980(1):18-19.JIN Weixi. Demonstration of Rodrigues matrix[J]. Bulletin of Surveying and Mapping,1980(1):18-19.
[10]HORN B K P. Closed-form solution of absolute orientation using unit quaternions[J].JOSA A,1987,4(4): 629-642.
[11]滕志远, 张爱武.单位四元素法在激光点云坐标转换中的应用[J].测绘通报,2010(11) :7-10.TENG Zhiyuan, ZHANG Aiwu. Application of unit four elements method to laser point cloud coordinate transformation[J]. Bulletin of Surveying and Mapping, 2010(11) :7-10.
[12]徐碧菡, 孙涪龙, 赵罡, 等.大部件对接中基于单位四元数的iGPS测量位姿比对研究 [J].图学学报,2014,35(5): 729-735.XU Bihan, SUN Fulong, ZHAO Gang, et al. A unit-quaternion-based attitude matching algorithm applied for iGPS measurement[J].Journal of Graphics,2014,35(5): 729-735.
[13]陈琪.三坐标POGO柱的结构设计及其力学特性、动态特性分析[D].杭州:浙江大学,2008.CHEN Qi.Structure design of POGO stick with 3-DOF and analysis of its mechanical &dynamic characteristics[D]. Hangzhou: Zhejiang University,2008.
