基于RTKLIB的精密单点定位及结果分析
2017-05-16潘军道韦照川杨柯
潘军道,韦照川,杨柯
(桂林电子科技大学 信息与通信学院,广西 桂林541004)
基于RTKLIB的精密单点定位及结果分析
潘军道,韦照川,杨柯
(桂林电子科技大学 信息与通信学院,广西 桂林541004)
本文基于RTKLIB现有的框架,对精密单点定位中的主要误差模型进行分析,通过调用其误差改正模型算法,实现了精密单点定位解算;对定位误差分析表明,X、Y、Z三个方向均在80个历元内误差达到0.1 m,而且逐步减小趋于稳定。定位误差在180个历元达到7 cm.
RTKLIB;精密单点定位;定位误差分析
0 引 言
RTKLIB由日本东京海洋大学的高须知二开发的开源程序包,由程序库和多个应用程序工具库组成,支持多个GNSS系统的标准和定位算法。精密单点定位(PPP),是由美国JPL实验室在1997年提出的,单台接收机在全球范围内静态或动态独立作业,利用IGS发布的精密轨道和钟差产品,采用严密的观测方程,其定位精度可达亚米级甚至厘米级,PPP不受作业距离的影响和限制,作业效率相对其他定位方式要高。JPL实验室开发的GIPSY软件进行24h连续的观测实验,静态定位精度优于10cm;事后单历元动态定位精度可达0.2~0.4m.随着IGS提供的精密星历逐步向实时化推进,精密单点定位技术已成为精密定位领域的热点问题,在实际工程应用上有很大的需求。PPP需要有精密的定位模型,对各类误差进行精确地误差修正,复杂度较大。在精密单点定位中单使用伪距定位的精度是不够的,因此必须引入比伪距观测量精度更高的载波观测量。本文在现有RTKLIB的基础上应用一定的解算策略,编写自己的算法实现了精密单点定位并对解算结果进行分析,得出一些有益结论。
1 精密单点定位
1.1 精密单点定位数学模型
PPP定位主要采用相位和伪距观测值,其观测方程为
drel+det+dol+der+dpcv+εpi,
(1)
λi(Ni)+dorb+drel+det+dol+der+
dpcv+dpwuφi+εφi,
(2)

要实现PPP,必须对各类误差精确修正[1-2],目前使用单频无法精确地修正电离层延迟,而双频矫正电离层的精度较高,因此,采用双频消电离层模式[3]。双频消电离层组合关系式为

(3)
(4)
其中:PIF为P1、P2无电离层伪距组合观测值; LIF为L1、L2无电离层相位组合观测值; f1、f2为载波频率。至此得到了无电离层组合观测模型:
drel+det+dol+der+dpcv+εpi,
(5)
dorb+drel+det+dol+der+
dpcv+dpwuφi+εφi.
(6)
1.2 误差处理方法
在此主要分析了卫星钟差与星历误差,卫星天线相位中心偏差,相位缠绕引起的误差,卫星相对论效应引起的相对钟差,对流程延迟修正,地球固体潮汐、海洋潮汐改正,地球自转引起的距离误差;并采用建模求解的策略进行了修正。
1) 卫星钟差与星历误差
卫星轨道位置与卫星钟差是定位的重要参数,对于卫星端来说,精密的的卫星钟差和卫星精密位置是必需的,如果通过用户解算时将钟差或者卫星轨道作为参数估计,那么定位方程将会亏秩,导致无法定位。目前国际上有多家服务中心负责计算卫星轨道和钟差[4],例如IGS,JPL,CODE,NGS,这些地面跟踪站根据对卫星的观测数据解算出卫星的钟差参数然后播发给地面用户站[5-6],如表1所示。
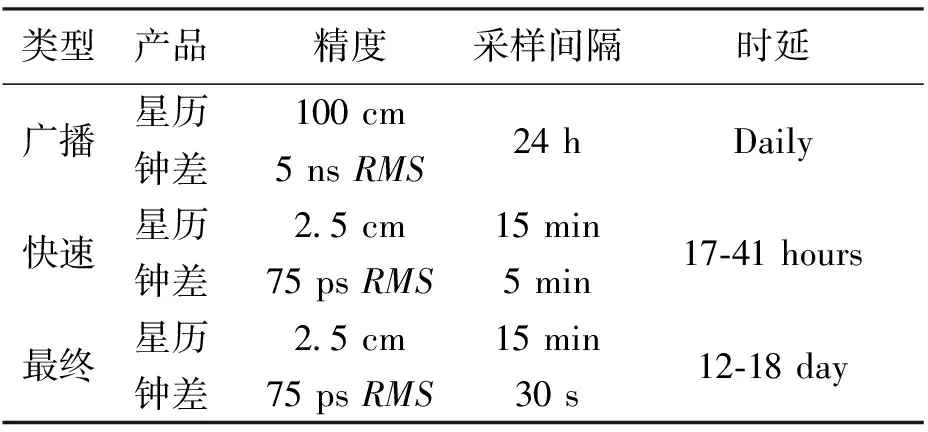
表1 IGS产品参数
注:表格数据来自http://www.igs.org/products
由表1可知,事后精密产品的精度是最高的,轨道误差2.5 cm以内,卫星钟差均方根在75 ps以内。在下文的数据处理采用的是事后精密星历和精密钟差。
2) 卫星天线相位中心偏差
地面跟踪观测站发布的卫星精密轨道位置指的是卫星质量中心的位置,而导航信号是从卫星天线位置发射出来的。由于卫星发射天线的位置与卫星质量不一致,因此会产生卫星轨道位置不准确,称之为卫星端天线相位中心偏差[7-8]。从IGS数据服务中心网站上下载此误差文件对天线相位中心偏差进行修正。卫星天线相位中心偏差包括两个部分,一个是基于物理参考位置的平均相位中心偏移(PCO),另一个是相位中心变化值,与高度角和方位角有关,是一个变化量。文中采用的是绝对相位中心修正模型(IGS-08)。表示为
Δφ(a,z)=Δφt(a,z)+Δr×e,
(7)
式中: Δr为天线参考点到平均相位中心的几何距离;e为接收机到卫星端方向上的旋转矩阵;a为卫星的方位角;z表示接收机的天顶角; Δφt(a,z)表示天线相位中心的变化改正值; Δφ(a,z)表示方位角与天顶角总的相位中心改正量。
3) 相位缠绕误差
卫星发射的导航信号是右旋圆极化(RHCP)电磁波信号,卫星天线或接收机天线绕极化轴旋转会导致相位观测量的变化,称之为相位缠绕效应。由于相位缠绕效应,相位观测量的误差最大可以达到一周,因此必须对此项误差进行修正。相位缠绕修正公式为
(8)
式中:ξ=k·(Dt×D);k为卫星到接收机单位向量;Dt和D分别为卫星到接收机天线的有效偶极矢量,Dt=xt-k(k·xt)-k·yt;D=x-k(k·x)+k·yt.
4) 卫星相对论效应修正
卫星钟和接收机钟所处的运动状态不同,导致卫星钟和接收机时钟由于相对论效应而产生相对钟差,星钟比地面钟走得快,所以在卫星发射前人为的将卫星钟频率减小;卫星的运动状态在不断地变化,各个卫星状态在不同的运动位置时时钟频率会有所不同[9],所以必须加以修正。采用精密定位时约定公式进行改正:
(9)

5) 对流层延迟
对流层延迟通常包括干延迟量和湿延迟量[10-11],90%左右是干分量,10%左右是湿分量;干分量可以通过Saastamoinen 先验模型精确修正[12-13],湿分量是由大气中的水汽引起的,变化较快,难以通过模型完全修正,对流层延迟采用RTKLIB中的水平梯度的对流层改正模型[13-14]
ΔT= m(ε)h·ZHD+m(ε)w·ZWD+
m(ε)azi·(GNcosφ+GEsinφ) ,
(10)
6) 地球固体潮汐效应改正
地球表面在摄动天体引力作用下产生周期性的涨落现象称为地球固体潮汐现象,地球固体潮在水平方向上可达5cm,径向可达30cm.[12,14],测站固体潮改正的近似公式为

(11)
式中:GM为地心引力常数;r为测站到地心的距离;GMj为引力常数,j=2表示月球引力常数,j=3 为日心引力常数;Xj为天体在地心参考框架的坐标向量;XP为在地心参考框架中测站坐标向量;θ为格林尼治平恒星时;h2为0.609 0;l2为0.085 2;λ和φ分别为测站纬度与经度。
7) 海洋潮汐改正
海洋潮汐的周期性涨落,测站坐标也会引起测站坐标的变化,因此在精密定位中必须修正,其改正模型为
Δc=∑jfjAcjcos(ωjt+χj+uj+φcj) ,
(12)
式中:Δc为对测站坐标分量影响; fj为j的分量比例因子; Acj为潮汐j分量对坐标的影响幅度; ωj为j分量的相位角偏差; φcj为潮汐j分量对坐标影响的相位角,其中 j=1,2,3…11.
8) 地球自转改正
导航信号在传输过程中,由于地球的自转运动和卫星在轨运动,会导致卫星信号的发射时刻与接受时刻所对应的卫星位置有所偏差,在计算卫星在轨位置时必须考虑此部分误差,用(XR,YR,ZR)表示接收机位置坐标,(XS,YS,ZS)表示卫星坐标位置。地球自转引起的距离改正值为

(13)
式中: ω为地球自转角速度; c为光速。
2 精密单点定位解算
2.1 数据来源
试验选取了北京房山2015年7月7日至10日连续4天的观测数据和IGS提供的精密星历和钟差产品、地球自转参数、天线参数以及http://holt.oso.chalmers.se/loading/提供的海洋负荷效应参数做验证。
2.2 解算流程及策略
在RTKLIB中针对PPP,采用扩展卡尔曼滤波(EKF)方法来估计接收机的参数。在VS2013平台上直接应用了RTKLIB中现有的框架,采用无电离层观测模型,编写自己的误差改正模型算法,实现误差的改正,从而得出解算结果。
在VS2013平台下新建工程,添加RTKLIB中的部分文件,导入数据,调用自己误差模型,进行解算,整个工程处理流程如图1所示。

图1 工程处理流程
2.3 解算结果分析
解算定位结果显示在ECEF坐标系下,三维图如图2所示,整个过程在30个历元左右就达到图中圆形区域,此后,解算结果的变化不大。
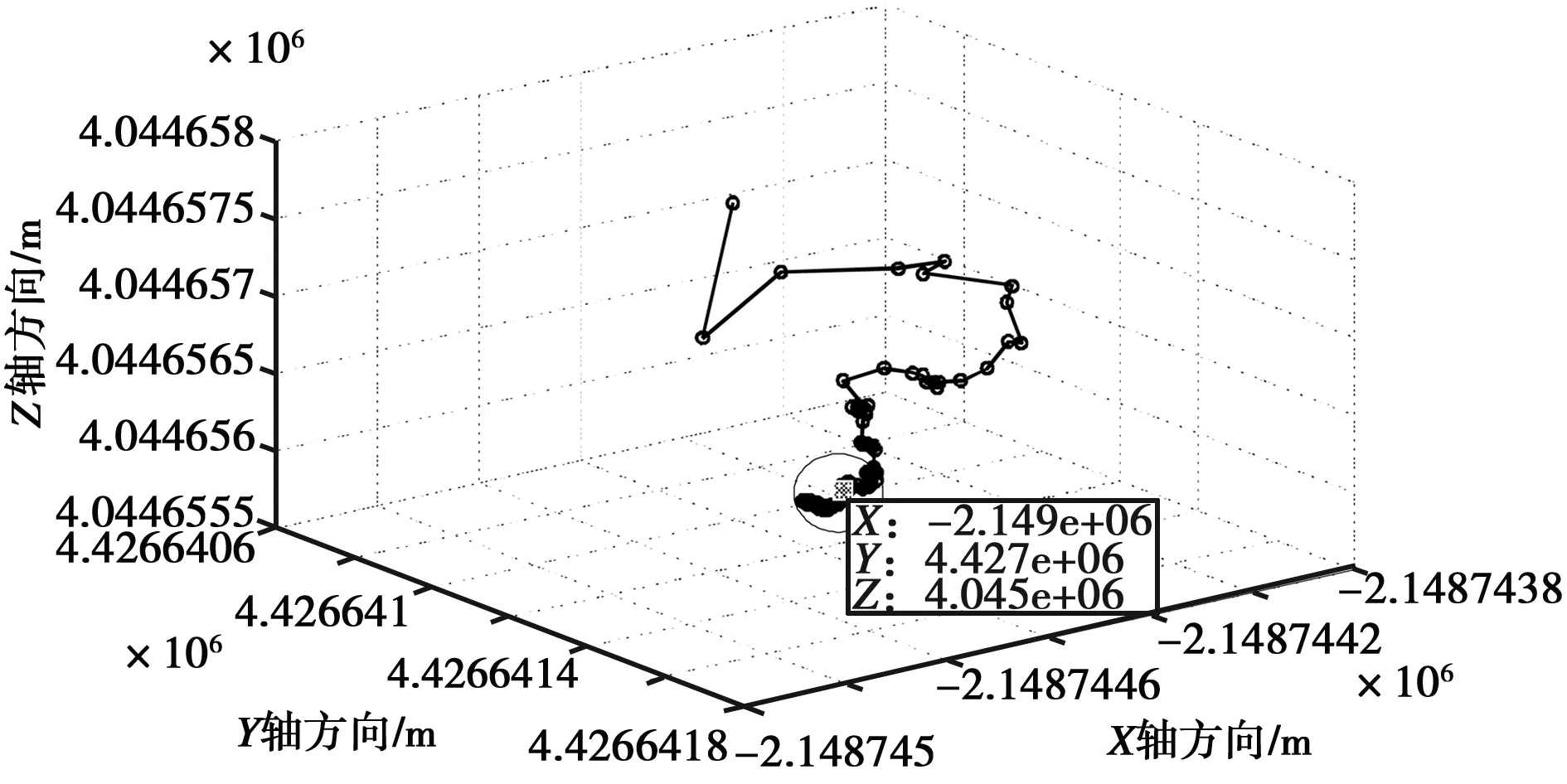
图2 三维定位结果
分别从X,Y,Z,三个方向上对定位结果的误差进行分析,接收机站点的准确坐标采用的是IGS提供的北京房山站点的位置。X、Y、Z三轴方向上定位误差如图3所示。
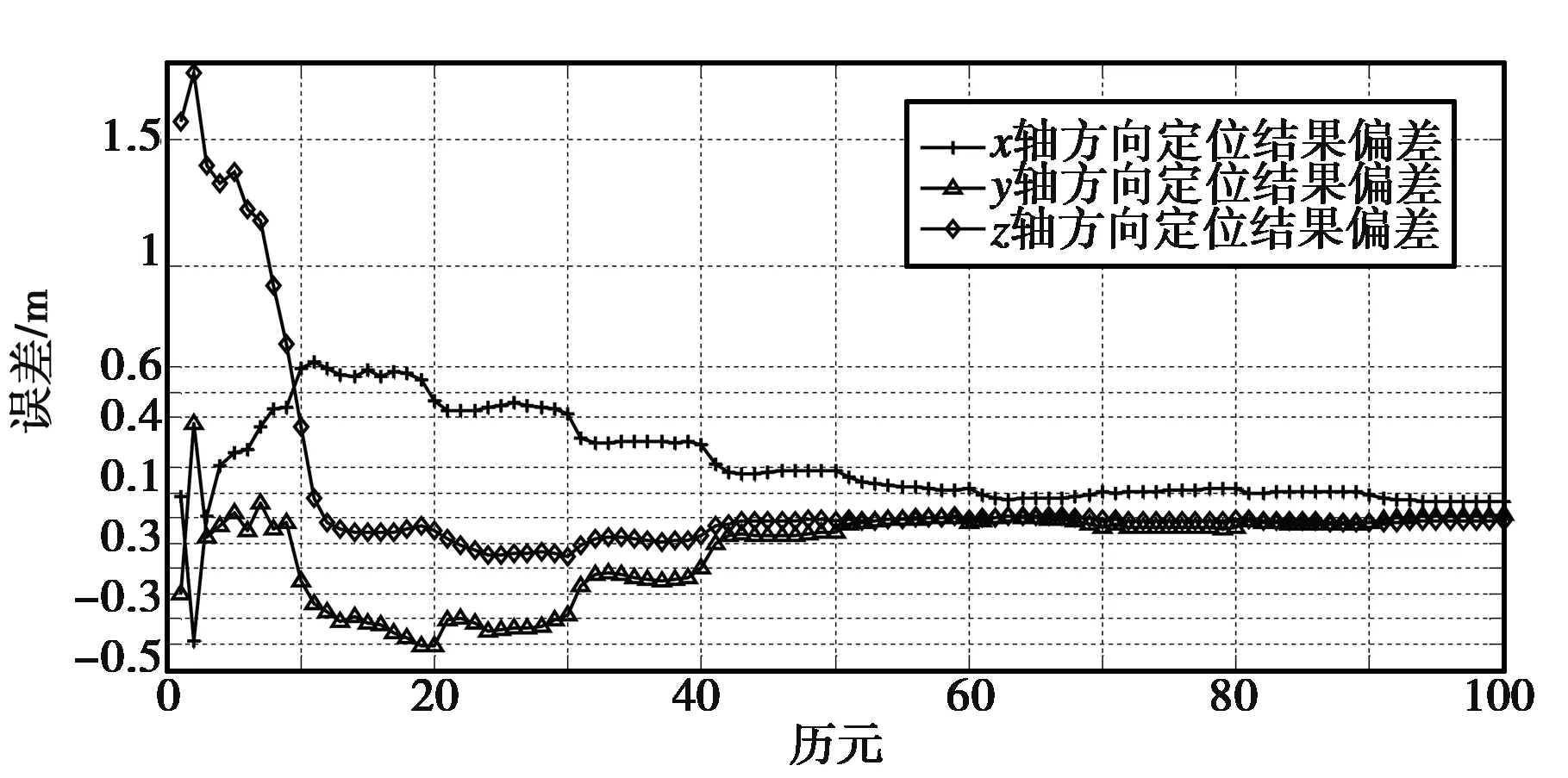
图3 三维定位误差
在解算初期,随着历元增加,X、Y、Z方向上的误差急剧减少。表2示出了收敛到不同误差所需要的时间对比。

表2 收敛到不同误差所要的时间对比
从图3和表2可以得出:X轴方向上误差下降到0.1m只需要61个历元(每个历元30s),之后误差虽然有上下浮动,但是总体趋势是在下降;Y轴方向上误差急剧下降,下降到0.1m只需要48个历元,之后误差一直在下降;Z轴方向上误差下降到0.1m只需要32个历元,随着历元增加误差也在逐步减少。在80个历元以后,X、Y、Z三个方向上的误差均在0.1m以内,而且误差趋于平滑且逐步减小。由图4可以得出到180个历元时,X、Y、Z三个方向上的误差均减小到0.07m以内且稳定。
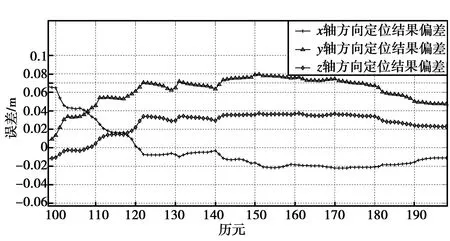
图4 三轴方向上的误差到0.07 m内
3 结束语
本文在VS2013平台上,基于RTKLIB现有的框架,对卫星钟差与星历误差,卫星天线相位中心偏差,相位缠绕引起的误差,卫星相对论效应引起的相对钟差,对流程延迟修正,地球固体潮汐、海洋潮汐改正,地球自转引起的距离误差作了分析,并且给出了处理方法和数学模型,实现了观测期间数据的定位解算。
得出的精密单点定位结果,在ECEF坐标系下,X、Y、Z三轴方向上的定位误差均可以达到7 cm,并且随着历元增加误差逐步平稳减小。从解算结果误差的收敛情况[8]可以看出,在收敛时间上,结果与目前精密单点定位结果相当。
文中使用的是IGS最终精密星历和钟差产品,要做到实时解算,需要进一步采用实时精密星历和钟差产品。
[1] 周承松,彭月,张小红, 等. 精密单点定位收敛时间的确定方法研究[J]. 导航定位学报, 2016,4(1):80-87.
[2] 何帆,高成发,潘树国,等. 不同星历和钟差产品的精密单点定位结果分析[J]. 导航定位学报, 2015, 3(4): 79-84.
[3] 王虎. GPS精密单点定位中电离层延迟改正模型的研究与分析[D].长沙:中南大学, 2008.
[4] 胡洪. GNSS精密单点定位算法研究与实现[D].徐州:中国矿业大学, 2014.
[5] 殷龙龙. 基于PPP在线时间比对技术研究[D].北京:中国科学院大学, 2015.
[6] 张小红,左翔,李盼,等. BDS/GPS精密单点定位收敛时间与定位精度的比较[J]. 测绘学报, 2015(3): 250-256.
[7] 张小红,李盼,李星星, 等. 天线相位中心改正模型对PPP参数估计的影响[J]. 武汉大学学报(信息科学版), 2011(12):1470-1473.
[8] 初东,王刚. GPS天线相位中心偏差的数学模型[J]. 测绘工程, 2000,9(4): 55-57.
[9] LEANDRO R F, SANTOS M C, LANGLEY R B. Analyzing GNSS data in precise point positioning software[J]. GPS Solutions, 2011, 15(1): 1-13.
[10]SHI J, XU C, LI Y,etal. Impacts of real-time satellite clock errors on GPS precise point positioning-based troposphere zenith delay estimation[J]. Journal of Geodesy, 2015, 89(8): 747-756.
[11]KHODABANDEH A, TEUNISSEN P J G. An analytical study of PPP-RTK corrections: precision, correlation and user-impact[J]. Journal of Geodesy, 2015, 89(11): 1109-1132.
[12]李黎,匡翠林,朱建军, 等. 水平梯度和映射函数对PPP对流层延迟估计的影响分析[J]. 工程勘察, 2011(5):52-56.
[13]曹文涛,郭际明,谢翔,等. 对流层水平梯度对PPP的影响[J]. 测绘通报, 2014(2): 13-15.
[14]XU Y, JIANG N, XU G,etal. Influence of meteorological data and horizontal gradient of tropospheric model on precise point positioning[J]. Advances in Space Research, 2015, 56(11): 2374-2383.
Precise Point Positioning Based on the RTKLIB and the Analysis of Result
PAN Jundao,WEI Zhaochuan,YANG Ke
(GuilinUniversityofElectronicTechnologyInformationandCommunicationSchool,Guilin541004,China)
Based on the existing framework of RTKLIB, we analyze the main error model in precise point positioning and complete the precise point positioning solution by calling the error correction model algorithm. The analysis of positioning error shows that the error in three directions of X,Y and Z is 0.1 meters in 80 epochs, and gradually decreases to stabilize. The positioning error is 7 cm at 180 epochs..
RTKLIB; Precise Point Positioning; positioning error analysis
10.13442/j.gnss.1008-9268.2017.01.019
2016-09-09
桂林电子科技大学研究生教育创新计划(编号:2016YJCX14)
P228.4
A
1008-9268(2017)01-0095-05
潘军道 (1992-),男,硕士,主要研究方向为通信与卫星导航。
韦照川 (1973-),男,副教授,主要研究方向为卫星导航与通信。
杨柯 (1990-),男,硕士,主要研究方向为精密导航与定位。
联系人: 潘军道E-mail:panjundao@yeah.net
