基于强跟踪滤波的传感器目标跟踪算法
2017-05-10曾明
曾 明
(湖南现代物流职业技术学院,湖南长沙,410131)
基于强跟踪滤波的传感器目标跟踪算法
曾 明
(湖南现代物流职业技术学院,湖南长沙,410131)
为了提高运动目标的跟踪精度,提出一种基于强跟踪滤波的传感器目标跟踪算法。首先通过传感器节点测量目标的状态值,并通过融合中心对信息进行融合,然后利用Cholesky分解技术变换成噪声独立的量化融合系统,并采用强跟踪滤波算法对目标状态进行估计,最后与其它目标跟踪算法进行对比实验。结果表明,本文算法不仅提高了目标跟踪的精度,而且具有更好的鲁棒性。
目标跟踪;无线传感器网络;强跟踪滤波算法;信息融合
0 引 言
目标跟踪是计算机研究领域一个重要问题,其在军事、交通、监控、工程控制等领域有巨大的应用价值,引起了人们的广泛关注[1]。随着信息融合的迅速发展,许多学者将无线传感器技术引入到目标跟踪研究中,相对于传统的目标跟踪技术,无线传感器技术具有跟踪更及时、更可靠、成本更低等优点,成为当前目标跟踪的主要研究方向[2]。
针对基于无线传感器的目标跟踪问题,国内外许多学者和众多专家投入了大量的时间和精力,进行了深入的研究。与传统的目标跟踪系统不同,无线传感器网络由大量的传感器节点组成,最原始的方法是基于单传感器节点目标跟踪,取得了不错的应用效果[3]。然而随着运动数量的增多,而且这些微型传感器节点的计算能力、能量、通信能力有限,同时由于在目标跟踪过程中,由于目标自身运行机动性、外界因素的干扰,以及单一传感器节点采集数据不完整性等条件限制,单个传感器的目标技术难以满足实际的应用需要,从而出现多传感器数据融合的目标跟踪技术[4]。采用多传感器对目标进行跟踪,可以最大限度利用有用信息,获得比单传感器更加理想的结果,成为当前传感器研究的重点[5]。传感器数据融合包括两种方式:集中式和分布式,集中式融合也称为量测融合,即将单一传感器采集的数据全部送到融合中心,信息量损失小,能够获得理论上的最优跟踪结果,主要有概率论法、经典分配法、最近邻法、多元假设法等[6],该类方法对融合中心数据处理能力以及通信带宽要求十分高,如果融合中心出现故障,那么整个跟踪系统就处于瘫痪状态,系统稳定性、可靠性差[7]。分布式融合也叫航迹融合,每一个传感器均有自己的跟踪滤波器,首先它们只测量各自的局部目标运动轨迹,然后融合中心对目标运动轨迹进行关联,主要有信息去相关法、协方差加权法、强跟踪法等[8],其对融合中心要求低,可扩展能力强,具有一定的优势,其中有扩展卡尔曼滤波(Extended Kalman Filter,EKF)、无迹卡尔曼滤波(Unscented Kalman Filter,UKF)、粒子滤波(Particle Filter,PF)等应用最为广泛[9]。EKF算法原理简单,容易实现,但在强非线性和非高斯环境下跟踪性能较差,然而在实际应用,许多因素使目标运动轨迹具有非线性、非高斯分布现象,跟踪精度低;相对于EKF,UKF具有一定的非线性拟合能力,但要求系统满足高斯分布条件;PF对目标进行跟踪时,其性能与重要性函数和重采样策略密切相关,其适合于估计精度要求低的场合,但是系统似然函数呈尖峰状态时,估计精度相当低,而且,计算量非常大,很难满足实时性的需求,因此实际应用价值不高。为此,许多研究学者提出了改进目标跟踪算法,以弥补这些算法的不足,如迭代扩展卡尔曼滤波(IEKF)、容积卡尔曼滤波(CKF)等[10,11],但是这些算法假设各传感器的量测噪声不相关,但是文献[12]研究结果表明感器之间的量测噪声往往相关,所以研究量测噪声相关条件目标跟踪具有更加重要的实际实用价值。
为解决无线传感器网络有限带宽和相关噪声造成的精度影响,提了一种强跟踪滤波的传感器目标跟踪算法,并通过仿真实验测试其估计精度和鲁棒性。
1 目标跟踪问题描述
1.1 非线性目标跟踪数学模型
在目标跟踪系统中,目标跟踪数学模型是建模的第一步,也是最基本的组成部分。目标在实际运动过程中,由于多种因素综合影响,可能导致突然加减速、变向以及转弯等随机运动行为,运动轨迹呈现非线性变化,导致目标跟踪是一种复杂的非线性系统。由于本文主要研究多传感器单目标跟踪问题,设无线传感器网络由N个微型节点组成,那么传感器网络跟踪系统的目标运动状态方程和测量方程可以描述为:

其中,x( k)∈Rn×1为目标状态;yi( k)∈Rp×1为第i个传感器的测量值,A( k)∈Rn×n为状态转移矩阵;w( k)表示过程噪声;μ(k )∈Rp×1表示测量噪声; Γ ( k ) 为过程噪声驱动矩
i阵;Hi(k)∈Rp×n为相应的测量矩阵[12]。
假设各个传感器之间w(k)以及μi(k)均相关,那么有:
跟踪目标初始状态x(0)的均值和方差分别为x0,P0,且与w( k)和μi(k)不相关[13]。
1.2 单传感器局部测量值的量化
在传感器网络的目标跟踪过程,为了充分利用网络带宽,单一节点首先对自己采集的信息进行量化,然后发送到融合中心,即有:
式中,Δi(k,r)表示量化步长[14]。
1.3 各传感器量测噪声去相关
无线传感器网络融合中心的测量方程为:

其中,()V k表示扩维测量噪声,其方差满足:
w( k)与V( k)的相关性为:

根据Cholesky分解[15],RV(k)可以唯一地分解:

那么式(5)可以转化为:
这样各传感器的测量噪声互不相关,测量与过程噪声间的相关性可以描述为:
传感器网络跟踪系统的目标运动状态方程可重写为:
2 强跟踪滤波的目标跟踪算法
在EF算法,预测和分析的误差协方差可以描述为:
其中,X为状态向量,T代表矩阵转置。
在式(16)中,由于真实状态Xt的值未知,因此预测和分析误差的协方差当然亦未知,因此获得PF和PA是EF算法最为关键的部分。强跟踪滤波算法将全部预测状态存放于XEF中,全部分析状态存放于中XEA,那么式(16)就可以变为:
因此,强跟踪滤波算法较好的克服了EF算法存在的不足,可以通过从非线性集合对误差协方差进行估计。
基于强跟踪滤波算法的多传感器目标跟踪步骤为:
(1)状态初始化。根据先验知识产生N个初始状态集合X0:
(2) 对第k时刻的状态进行估计,即有:
然后计算第k+1时刻的状态值,并计算它们的平均值:
(3)计算k+1时刻的增益矩阵:
(5)返回步骤(2),进入下一时刻。
综合上述可知,基于强跟踪滤波算法的多传感器目标跟踪系统结构如图1所示。
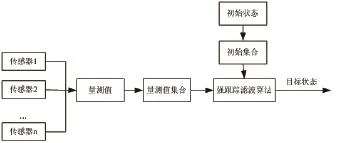
图1 目标跟踪系统的结构
3 仿真实验
3.1 仿真参数
为了验证本文算法的有效性,在Intel 2.90 GHz CPU,4G DDR3 RAM,800GB 硬盘,Windows XP操作系统平台下,采用Matlab 2012编程进行仿真实验,并采用文献[15]进行对比实验。假设有3个传感器对目标状态进行跟踪,目标做匀速运动,目标动态方程可描述为:

其中,Q(k)=0. 25,仿真时间100s。
3.2 结果与分析
3.2.1 目标状态均匀变化时的性能对比
当目标状态均匀变化时,本文算法与文献[15]算法的仿真结果如图2和图3所示。从图2和图3不难发现,相对于文献[15]的目标跟踪算法,本文算法的估计精度更高,有效降低了跟踪误差,获得更加理想的跟踪效果。
3.2.2 目标状态发生突变时的性能对比
为了进一步测试算法的鲁棒性,测试目标状态发生突变时的跟踪的准确性,设在第30时刻,目标状态发生了一个突变,两种算法的仿真结果如图4和图5所示。从4和图5可以清楚看出,
在发生突变条件下,本文算法可以以较好的速度对目标实现跟踪,而文献[15]算法经过较好的调整后才能对目标实现准确跟踪,对比结果表明了本文算法是一鲁棒性强、精度高的目标跟踪算法。
4 结束语
仿真结果表明,相对于当前性能较优的传感器目标跟踪算法,本文算法不仅提高了目标跟踪精度,可以能够准确地对目标变化状态实际跟踪,大幅度降低了跟踪误差,而且对于机动性目标可以实现准确跟踪,具有较好的鲁棒性。
[1]韩崇昭,朱洪艳,段战胜.多源信息融合[M]. 北京:清华大学出版社,2006.
[2]肖胜,邢昌风,石章松. 无线传感器网络中面向目标跟踪的动态分簇方法[J]. 计算机工程与应用, 2012, 48(35): 88-92.
[3]ZHOU Yan, LI Jian-xun, WANG Dong-li. Target tracking in wireless sensor networks using adaptive measurement quantization [J]. Science China Information Sciences, 2012, 55(4):827-838.
[4]XU Jian, LI Jian-xun, XU Sheng. Data fusion for target tracking in wireless sensor networks using quantized innovations and Kalman filtering [J]. Science China Information Sciences, 2012, 55(3):530-544.
[5]郭文艳,韩崇昭,雷明.迭代无迹Kalman粒子滤波的建议分布[J].清华大学学报:自然科学版,2007,41(S2):1866-1869
[6]石章松,邹 冈,刘 忠. 传感器网络中的分布式粒子滤波被动跟踪算法比较研究[J].传感技术学报,2007,20(6):1344-1348.
[7]陈佩军. 无线传感器网络的目标跟踪算法研究[D].浙江工业大学,2011.
[8]周同驰,艾斯卡尔·艾木都拉,王荣栓,等.多源测量信息融合的弱点动目标跟踪算法[J]. 计算机工程与应用, 2012, 48(2): 182-184.
[9]GE Quan-bo, XU Ting-liang, WEN Cheng-lin. Networked Kalman filtering with combined constraints of bandwidth and random delay [J]. Science China Information Sciences, 2012, 55(10): 2343-2357.
[10]管冰蕾,汤显峰,徐小良.噪声相关的带宽约束传感器网络融合算法[J].河南大学学报(自然科学版), 2013, 43(2): 200-203.
[11]段战胜,韩崇昭. 相关量测噪声情况下多传感器集中式融合跟踪 [J].系统工程与电子技术, 2005, 27(7): 1160-1163.
[12]郭辉,姬红兵,武斌. 采用拟蒙特卡罗法的被动多传感器目标跟踪[J]. 西安电子科技大学学报(自然科学版), 2010,37(6):1042-1047.
[13]巫春玲,韩崇昭.平方根求积分卡尔曼滤波器[J]. 电子学报, 2009,37(5):987-992
[14]李良群,姬红兵,罗军辉. 迭代扩展卡尔曼粒子滤波器[J].西安电子科技大学学报, 2007,34(2):233-238.
[15]汤显峰,管冰蕾,葛泉波,等.一种多传感器量化融合目标跟踪方法[J]. 计算机应用研究,2014,29(1):100-114
Sensor racking algorithm based on strong tracking filtering
Zeng Ming
(Hunan Vocational College of Modern Logistics, Changsha Hunan, 410131)
In order to improve the tracking precision, a novel wireless sensor networks tracking algorithm based on strong tracking filtering algorithm is proposed in this paper. Firstly, the messages which are collected by wireless sensor nodes are sent to the fusion centre, and then, cholesky factorization technology is used to establish the state equation, and strong tracking filtering technique is introduced to estimate target tracking, finally the simulation experiments are carried out to test the performance. The results show that the proposed algorithm has higher estimation precision and the robustness compared with other algorithms.
target tracking;wireless sensor networks;strong tracking filtering algorithm;information fusion
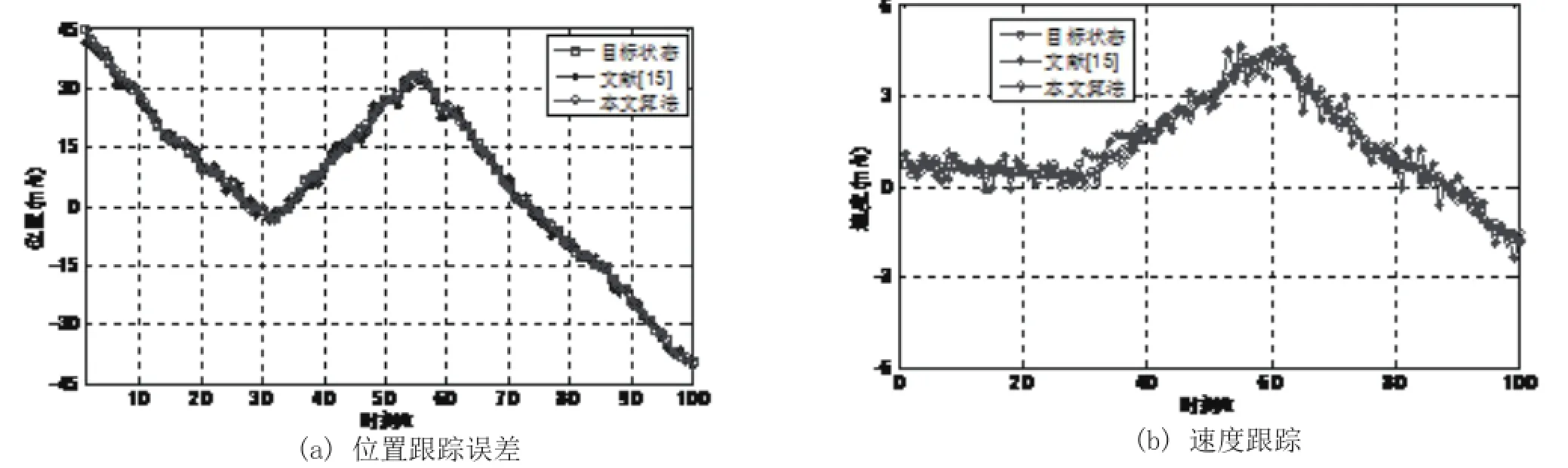
图2 本文算法与文献[15]的目标跟踪曲线

图3 本文算法与文献[15]算法的跟踪误差对比
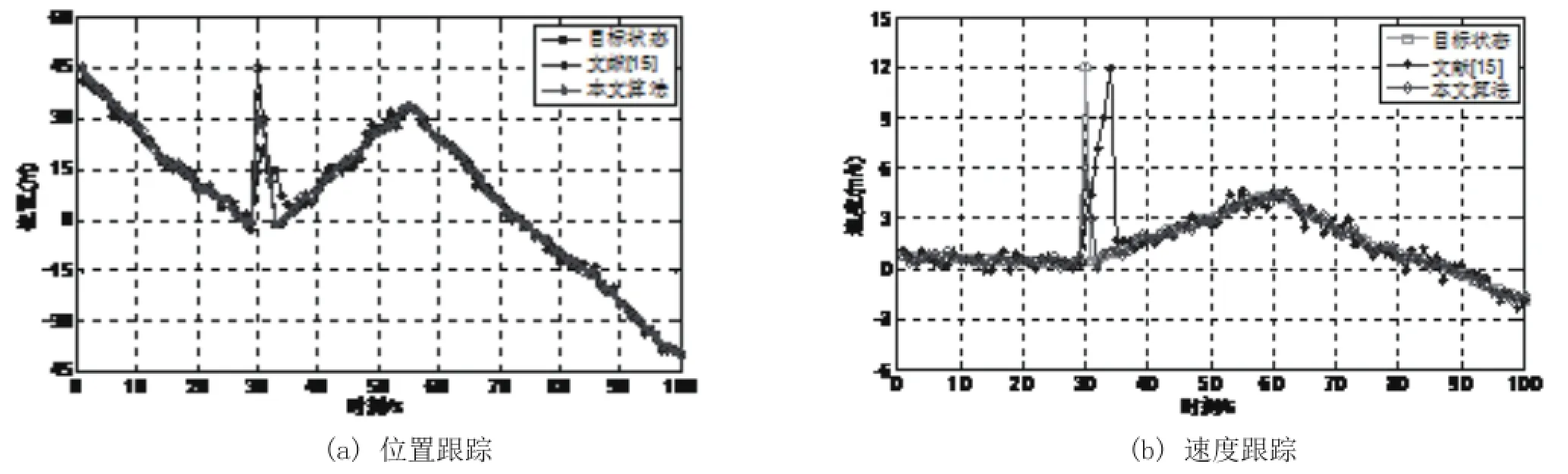
图4 两种算法的估计曲线
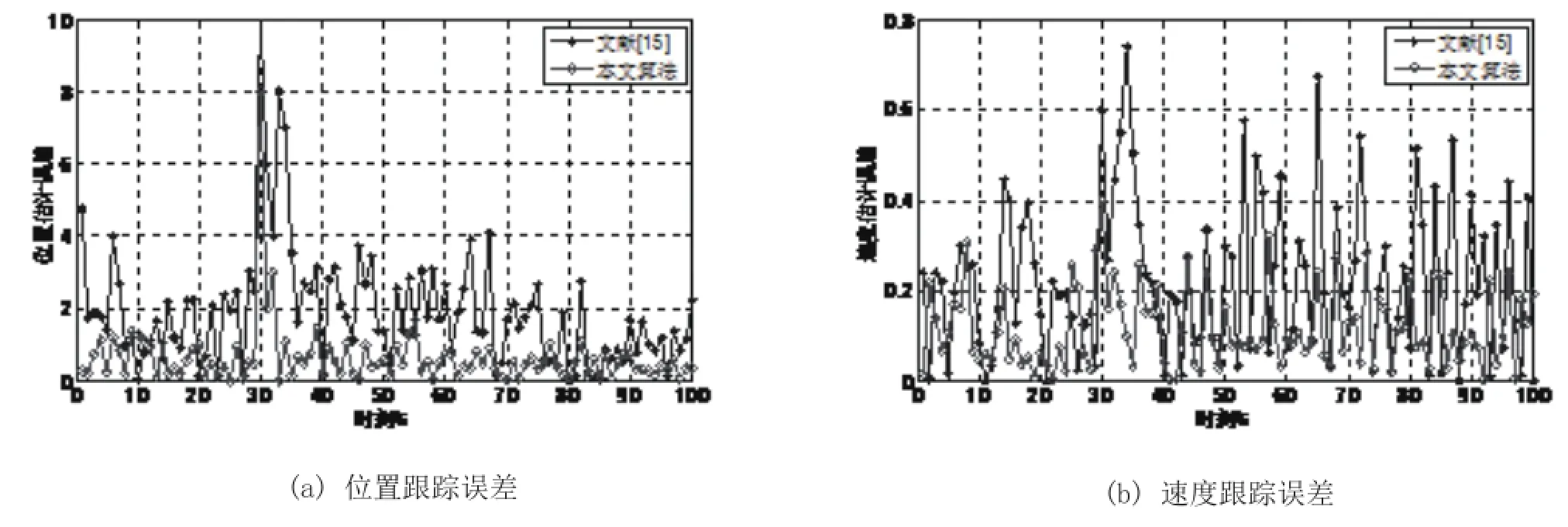
图5 本文算法与文献[15]算法的跟踪误差对比
湖南省科技重大专项(2010FJ1005)
