无人机平台用多源信息融合导航技术
2017-05-03王于坤刘壮华杨红喜黄丙胜
王于坤, 姜 梁, 刘壮华, 杨红喜, 黄丙胜
(北京航天无人机系统工程研究所, 北京 100094)
0 引言
无人机系统在军事方面具有独特优势,已被广泛用于战场前沿地带的近距离侦察和监视等特殊任务[1]。导航系统作为无人机的眼睛,其可靠性和准确性至关重要。在松组合导航系统中,GPS仍然作为一个单独的系统在使用[2],存在低于4颗星无法工作的情况。文献[3]采用传统的伪距、伪距率差值作为观测信息,进行MEMS紧组合系统仿真工作,详细的分析了少于4颗可见星状态的定位性能。然而,在实际的MEMS紧组合系统中采用文献[3]的紧组合算法,必须通过其他信息补偿掉接收机的初始钟差和钟漂才能使用。文献[4]提出的紧组合算法对大于3颗可见星的情况下进行了跑车实验验证。文献[5]通过跑车实验得出的结论是:可见星数目小于4时紧组合系统定位的纬度误差、经度误差小于100 m,且与导航时长无关。文献[5]所提算法必须在接收机的初始钟差等效距离误差以及钟漂等效距离率误差引起的距离误差均已经扣除的前提下才能实现,在实际应用中具有一定的局限性。文中提出了多源信息融合导航方案,并解决了组合导航系统航向角误差无法估计以及可见卫星等于3颗时组合效果差的问题。
1 系统总体结构
该系统总体结构如图1所示,主要由MIMU(micro-inertial measure unit)、GPS接收机、磁航向传感器、气压高度计、空速传感器和导航计算机组成。其中MIMU由三轴数字加速度计和三轴数字陀螺仪组成。磁航向传感器采用霍尼韦尔公司的三轴数字磁阻传感器HMC5883L。GPS接收机采用自研的高精度卫星导航接收机模块。导航计算机采用DSP6747作为处理器。导航计算机是一种专用的数据采集和处理系统,它具备如下功能:1)采集MIMU的角速度、加速度测量值;2)接收GPS伪距、伪距率信息;3)采集磁强计数据;4)采集气压高度计和空速传感器测量数据;5)完成导航和组合滤波[7-8]解算;6)输出导航数据。

图1 系统结构图
2 数学模型
2.1 系统状态方程
状态变量选取为:
(1)
式中:φi(i=e,n,u)为姿态角误差;δvi(i=e,n,u)为地理系下的速度误差;δL、δλ、δh分别为纬度误差、经度误差和高度误差。
状态方程形式如下:
(2)
式中:F为9×9系统状态转移矩阵,矩阵中的元素由参考文献[9]得到;G是9×6的系统噪声驱动阵;W是6×1的系统噪声阵。
2.2 系统观测方程
GPS接收机第i个通道的伪距差、伪距率差量测方程如下:
式中:δX、δY、δZ为在地心地固坐标系中表示的位置误差;Kij(j=1,2,3)是惯导解算位置到第i颗导航星的方向余弦;κij(j=1,2,3)表示Kij(j=1,2,3)的变化率;δTu是与时钟误差等效的距离误差;δTru是与时钟频率误差等效的距离率误差[10]。
将通道i和j的量测信息进行一次差分,得到如下:
δMij=δMi-δMj=(Ki1-Kj1)δX+
(Ki2-Kj2)δY+(Ki3-Kj3)δZ+vij,M
(5)

(6)

1)基于伪距差分的观测方程
(7)
式中:

2)基于伪距率差分的观测方程
(8)
式中:

3)基于惯导高度与气压高度的观测方程
由于气压高度和大气静压直接相关,因此飞行高度的误差来源主要是静压测量误差。载体运动过程中,会引入较大的静压测量误差,导致气压高度计测量不准确。利用空速传感器测量的空速信息对气压高度进行补偿。设惯导解算得到的高度信息为hI,气压高度计通过空速补偿后的高度为hB。
(12)
4)基于惯导航向与磁航向的观测方程
由于磁强计受环境影响比较大,因此必须标定后使用。设惯导解算得到的航向信息为ψI,磁强计标定后测量的磁强信息通过计算得到航向信息为ψm。
(13)

综合式(7)、式(8)、式(12)和式(13)可以得到系统观测方程如式(14)所示:
(14)
3 实验结果
2016年11月11日进行了动态实验。动态实验共进行了两次跑车实验:第一次跑车实验验证多源信息融合导航系统在可见星大于3颗以上状态下的导航性能;第二次跑车实验用于验证仅存在3颗星状态下的导航性能。
3.1 跑车实验一
本次跑车实验历时约35 min。采用高精度光纤组合导航系统作为基准系统(光纤陀螺全温零偏稳定性小于0.1°/h,加表全温零偏稳定性小于0.2 mg),测试导航系统性能。
图2是系统实验实物图。图3是可见卫星的数量曲线。图4是多源信息融合导航系统与光纤组合导航系统跑车路线。图5是姿态角对比曲线,蓝色实线为光纤组合导航系统测量的姿态角曲线,绿色虚线为多源信息融合导航系统测量的姿态角曲线(由于安装原因,相比于光纤组合导航系统存在一定的安装误差角)。图6是速度误差曲线。图7是位置误差曲线。多源信息融合导航系统与光纤组合导航系统的导航信息误差统计如表1所示。

图2 系统实验实物图
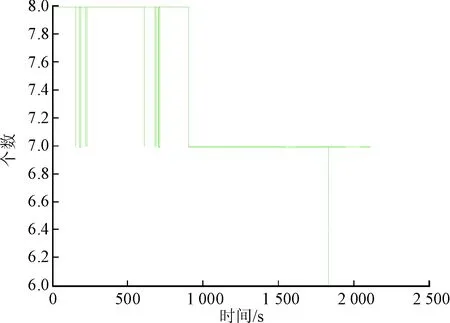
图3 可见卫星数曲线
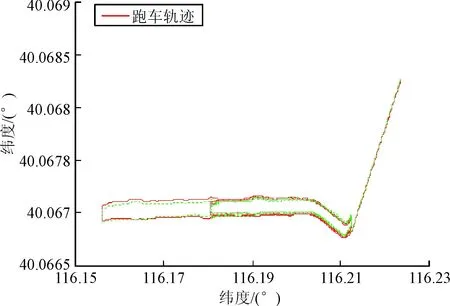
图4 运动轨迹曲线

图5 姿态角对比曲线
由表1可以看出:可见星大于3颗时,俯仰角误差均值为-0.859 1°,横滚角误差均值为-0.076°,航向角误差均值为0.830 1°;东速误差均值为0.024 3 m/s,北速误差均值为0.004 8 m/s,天向速度误差均值为-0.035 m/s;经度误差均值为-3.711 3 m,纬度误差均值为-0.219 1 m,高度误差均值为4.954 4 m。由此说明,文中设计的多源信息融合导航系统在大于3颗可见星的状态下可以提供可靠的导航信息。

表1 导航信息误差统计特性

图6 速度误差曲线

图7 位置误差曲线
3.2 跑车实验二
本次实验历时30 min,任意选取3颗可见星进行导航信息融合,实验结果为:
图8是可见卫星的数量曲线,绿色虚线表示跑车情况下正常的收星个数;蓝色实线表示实际使用的收星个数。图9是跑车轨迹,绿色虚线表示多源信息融合导航系统跑车轨迹,红色实线表示光纤组合导航系统跑车路线。图10是姿态角对比曲线,蓝色实线为光纤组合导航系统测量的姿态角曲线,绿色虚线为多源信息融合导航系统测量的姿态角曲线
(由于安装原因,相比于光纤组合导航系统存在一定的安装误差角)。图11是速度误差曲线。图12是位置误差曲线。多源信息融合导航系统与光纤组合导航系统的导航信息误差统计如表2所示。
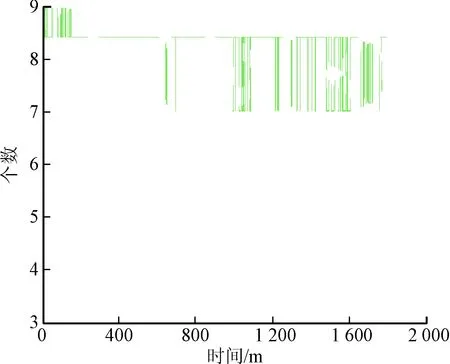
图8 可见卫星数曲线
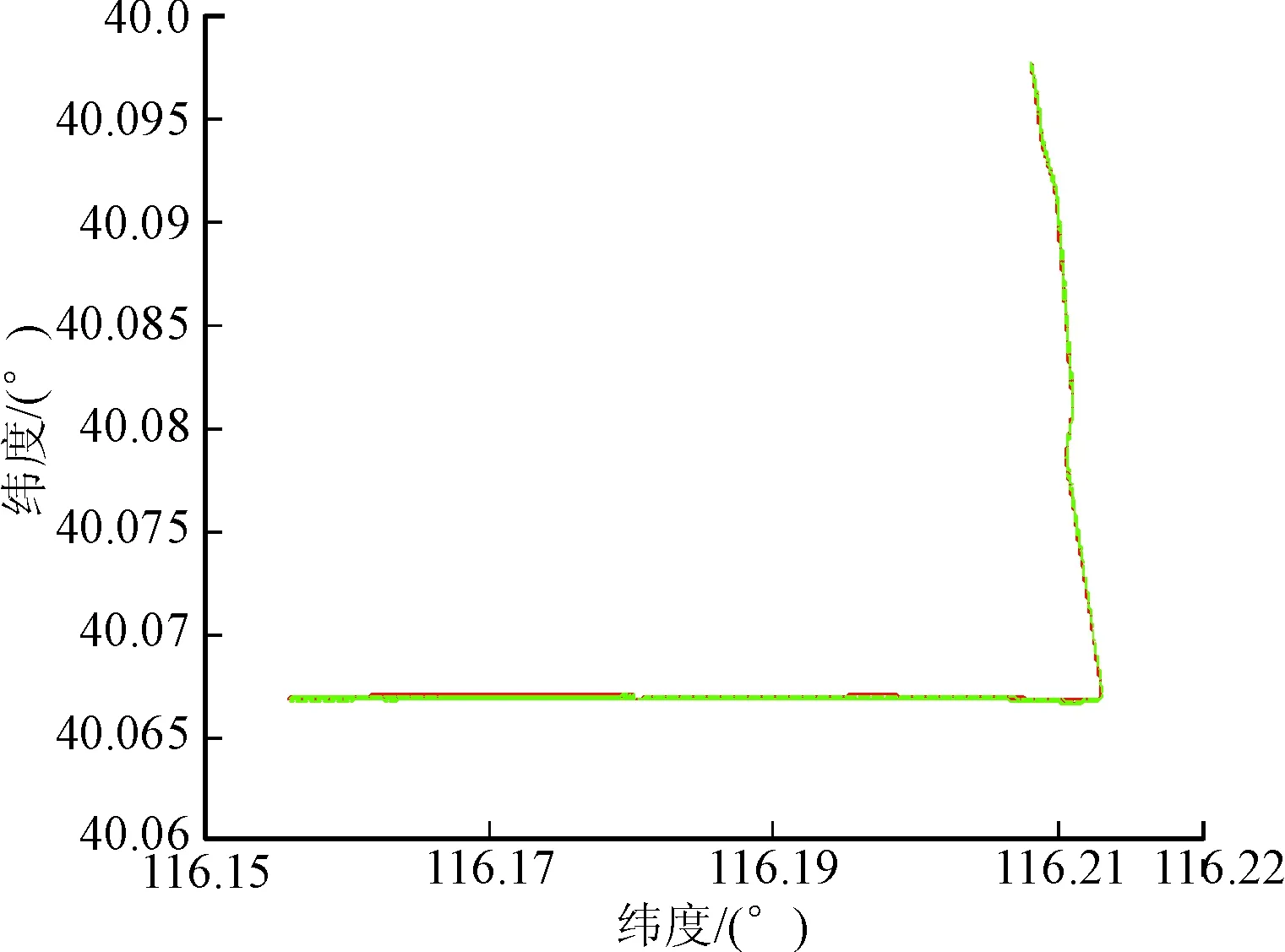
图9 运动轨迹曲线

图10 姿态角对比曲线

表2 导航信息误差统计特性

图11 速度误差曲线

图12 位置误差曲线
由表2可以看出:可见星等于3颗时,俯仰角误差均值为-0.282 0°,横滚角误差均值为-0.294 7°,航向角误差均值为1.460 4°;东速误差均值为0.020 8 m/s,北速误差均值为0.001 3 m/s,天向速度误差均值为-0.029 m/s;经度误差均值为-4.924 3 m,纬度误差均值为2.187 0 m,高度误差均值为-8.812 6 m。由此说明,文中设计的多源信息融合导航系统在仅有3颗可见星的情况下依然可以提供稳定的导航信息。
4 结论
文中针对无人机平台,设计了基于MIMU/GPS/磁强计/气压高度计/空速传感器的多源信息融合导航系统。通过多源信息融合技术,实时估计系统误差,完成系统校正。跑车实验结果表明:设计的多源信息融合导航系统具有测量精度高、成本低、体积小的特点,具有很好的工程应用价值。
参考文献:
[1] 昂海松. 微型飞行器系统技术 [M]. 北京: 科学出版社, 2013: 4-6.
[2] 王新龙, 李亚峰, 纪新春. SINS/GPS组合导航技术 [M]. 北京: 北京航空航天大学出版社, 2015: 1-6.
[3] ZHOU Qifan,ZHANG Hai, LI You,et al. An adaptive low-cost GNSS/MEMS-IMU tightly-coupled integration system with aiding measurement in a GNSS signal-challenged environment[J]. Sensors, 2015,15(9): 23954-23982.
[4] 郭美凤, 林思敏, 周斌. 等. MINS/GPS一体化紧组合导航系统 [J]. 中国惯性技术学报, 2011, 19(2): 214-219.
[5] 郑辛, 付梦印. SINS/GPS紧耦合组合导航 [J]. 中国惯性技术学报, 2011, 19(1): 33-37.
[6] GEBRE-EGZIABHER D, HAYWARD R C,POWELL J D. Design of multi-sensor attitude determination systems [J]. IEEE Transations on Aerospace and Electronic Systems, 2004,40(2): 627-649.
[7] 陈帅, 王于坤, 李玺安. 分布式光电平台用MIMU传递对准技术 [J]. 中国惯性技术学报, 2013, 21(6): 706-709.
[8] ZARCHAN Paul. Fundamentals of kalman filtering: A practical approach[M]. 3rd ed. [S.l.]: American Institute of Aeronautics and Astronautics Inc., 2009: 549-585.
[9] 秦永元. 惯性导航 [M]. 北京: 科学出版社, 2014: 355-160.
[10] 王惠南. GPS导航原理与应用 [M]. 北京: 科学出版社, 2003: 244-246.
