超磁致伸缩微振动电驱系统设计与实现
2017-04-25莫杭杰杨斌堂喻虎曹逢雨
莫杭杰,杨斌堂,喻虎,曹逢雨
(上海交通大学机械系统与振动国家重点实验室,上海200240)
超磁致伸缩微振动电驱系统设计与实现
莫杭杰,杨斌堂,喻虎,曹逢雨
(上海交通大学机械系统与振动国家重点实验室,上海200240)
为了实现对超磁致伸缩驱动器的微振动进行实时精密控制,设计大功率程控电驱系统,包括恒流驱动电路和供电电路。首先,对该恒流驱动电路所采用的连续调整型恒流源的原理进行研究。接着阐述该电路的具体设计以及元器件的选型。然后,详细介绍该恒流驱动电路的供电电路所采用的拓扑结构以及具体设计。实验结果表明:该大功率程控电驱系统输入的小电压信号与输出大电流信号的线性度为0.105%,时漂为3 mA/h,频率可达500 Hz,并且驱动超磁致伸缩驱动器实现1 Hz和5 Hz的正弦输出,基本满足了驱动超磁致伸缩微振动的高精度、高稳定性、高集成度的要求。
振动与波;微振动;超磁致伸缩驱动器;驱动电路;恒流源
磁致伸缩材料(简称GMM)是一种新型的智能材料,20世纪80年代,美国Edge Technologies公司生产的Terfenol-D超磁致伸缩材料引起了工业界和学术界的重视,并开始了广泛的研究和应用。特别是在微振动和精密驱动领域中,GMM的应用前景十分广阔[1]。它的饱和磁致伸缩应变系数大(λ=0.8×10-3~1.6×10-3),几厘米的器件能产生几十微米的位移;它的能量转换效率高(49%~56%),可以制造高能量转换效率的机电产品;它的能量密度大,适用于制造大功率器件;它的响应速度极快(达微秒级),可以制造超高灵敏电磁感应器件[2–4]。但是,超磁致伸缩驱动器的性能,在很大程度上取决于给驱动器提供电能的电驱系统的性能。所以超磁致伸缩驱动器的电驱系统设计是目前阻碍超磁致伸缩驱动器应用的技术难点之一。
近年来,研究超磁致伸缩驱动器的高校和科研院所都开始研制其电驱系统,文献[5]设计了基于ARM的恒流驱动电路,使用互补对称的功率MOSFET作为后端功率放大器件,由于运算放大器输出电压限制,使得输出功率较小。文献[6]通过在运算放大器的供电电源两端添加三极管,实现浮动供电将驱动电路的输出电压扩大了一倍,一定程度上改善了动态性能。但是这些都只是涉及到驱动电路部分,并没有设计与之相配的供电电路。其集成性和工程应用性都不高。
针对目前设计的恒流驱动电路输出功率不高、集成性较差、工程应用性不强的问题,通过对电路原理进行分析,设计大功率、高线性度、高动态响应的驱动电路和与之匹配的供电电路,并用实验对设计的电驱系统的静态、动态性能指标进行测试。
1 驱动电路的原理
考虑到磁致伸缩材料高灵敏度的特性,选用纹波较小的连续调整型恒流源作为超磁致伸缩执行器的驱动电路[7]。如图1所示。
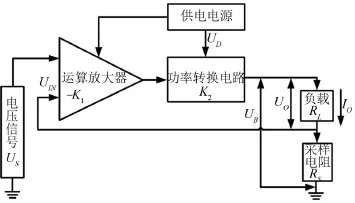
图1 连续调整型电流源
连续调整型电流源中,US是控制恒流源输出电流大小的输入电压信号,UIN是运算放大器正向与反向输入端的电压差,K1是运算放大器的增益,K2是功率转换电路的电压增益,RL是恒流源的外接负载,RS是采样电阻。UO是负载两端电压,即输出电压,IO是流过负载的电流,即输出电流,UD是供电电源提供的电压[8]。
根据基本电路原理,由图1可以得到

由式(1)可以推导出输出电流表达式为

式(2)中,因为运算放大器的增益K1很大,所以K1K2RS>>RS+RL,同理K1K2US>>K2UD-UO,则式(2)可近似写为

由式(1)-式(3)可知,该恒流源电路的输出电流只与输入电压和采样电阻有关,与负载无关,在确定了采样电阻的阻值之后,通过控制输入电压,便可以控制输出电流。这就是连续调整型恒流源的原理。
2 电路设计与实现
2.1 恒流电路设计
设计的恒流驱动电路如图2所示。

图2 恒流驱动电路
其由常用的运算放大器OPA27精密运算放大器、大功率运算放大器PA340CC、功率MOSFET(即Q1和Q2)、高精密无感采样电阻、保护二极管以及相应的电阻和电容等组成。
其中,OPA27精密运算放大器主要作用是增加输入阻抗,减小输出阻抗,起到缓冲的作用;大功率运算放大器PA340CC是美国APEX公司的高压运放系列产品,可输出±150 V的电压摆幅,远远大于常用的运算放大器,因此可以驱动较大功率的磁致伸缩驱动器。磁致伸缩驱动器的励磁线圈就是恒流驱动电路的负载,在电路中为R9和L1。由于负载呈感性,使用了电容C9和电阻R10进行相位补偿。
该电路是由运算放大器构成的同相比例运算电路。由运算放大器“虚短”和“虚断”的特性可得如下公式

式中Ua、Ub分别为运算放大器的同相输入端和反相输入端的电压;R3、R4是分压电阻;R15是采样电阻,选用两个大功率精密无感军用电阻(0.5 Ω/20 W)并联。
由式(4)可以推导出输出电流的公式为

式(5)表明,输出电流Io与输入电压Ui成正比,与负载无关。通过测试采样电阻R15两端电压,即可得到通过磁致伸缩驱动器的电流。
2.2 限流电路
功率MOSFET在工作时,可能会因为各种问题造成过大的输出电流,损坏功率MOSFET,因此有必要设计其限流电路。图3为Q1、Q2和电阻构成的MOSFET限流电路,其中Q3和Q4是功率MOSFET,三极管Q1、Q2和电阻R3、R4起限流保护作用。
其工作原理为:假设电路输出正向电流,则栅极电压VG1上升,开启场效应管Q3,电流Io从上往下流经电阻R3输出。随着Io的增加,电阻R3上的压降增加,则三极管Q1的基级电压随之增加,一旦到达三极管Q1的开启电压,则三极管Q1导通,场效应管Q3的栅极电压VG1下降,输出电流Io也随之下降。通过这种方式,电路实现了限流保护,限制电流的大小为

式中Im为限流后电路输出电流的最大值;Von为三极管Q1和Q2的开启电压;RL为限流电阻。实际设计中选用0.1 Ω的限流电阻,使得输出电流控制在7 A以下。
2.3 供电电路设计
恒流驱动电路中,OPA27运算放大器需要正负15 V供电电压,PA340CC功率运算放大器需要正负60 V供电电压,且正负60 V输出电压还需要有较大的输出电流,以驱动超磁致伸缩驱动器,因此需要设计其供电电路,保证该恒流驱动电路正常工作。
在权衡输出性能、集成性和实用性后,选择开关型设计恒流源驱动器的供电电压。
图4为采用SPDM控制器的半桥式开环供电电路。该电路的输入电压为工频市电,经整流桥滤波后在变压器的输入端达到约300 V的直流电压。300 V的直流电压经过半桥式DC-DC转换为正负60 V直流电压,此外,电路通过7805、7815、7915三端稳压器输出正5 V电压和正负15 V电压。正5 V电压用于给控制器、LED等模块供电,正负15 V电压用于给运算放大器OPA27供电。
该开关型供电电源采用的半桥式拓扑结构如图5所示。

图4 半桥式开环供电电源
两个功率开关管Q1和Q2在PWM信号作用下,交替地导通与截止。当开关管Q1导通时,在输入电压Vin作用下,电流经Q1、变压器初级绕组N1、电容C3和电容C2给变压器初级绕组N1励磁,经次级二极管D3、绕组N2给负载供电。开关管Q2导通时情况类似。通过功率开关管Q1、Q2交替给变压器初级绕组N1励磁并为负载供电。通过改变导通开关的占空比,可以改变二次侧整流电压的平均值,从而达到改变输出电压Vo的目的[9]。

图5 半桥式拓扑结构
3 实验结果
根据实验室现有的超磁致伸缩驱动器,搭建如图6所示的实验平台。

图6实验测试平台
图7是实验平台结构框图。首先是测试电驱系统的静态输出特性。负载电感量为10 mH,静态电阻为8.4 Ω(实测),采用NF的数字信号发生器输入电压,测得图(6)中电阻R15两端电压Ub,并换算成电流,获得实验数据如表1所示。该实验中R3=R4,则由式(5)可得理论数值Io=2×Ui。

图7 实验测试平台结构框图
非线性度是表征该电驱系统静态性能的一个重要参数,是指该系统的输出、输入之间保持线性关系的一种度量。图8为表1数据所作的定度曲线以及用最小二乘法进行回归得到的拟合曲线,两者几乎重合。

图8定度曲线和拟合曲线
图9为实际输出电流与拟合输出电流差值。

图9 输出电流与拟合电流差值
求得的拟合直线方程为

定度曲线和拟合直线的偏差为

将表1实测的21个点值代入,得到如图所示残差图,可求得在输入电压为2.5 V、输出电流为4.774 A时输出电流与拟合直线间的偏差最大,为那么恒流驱动电路的非线性度为
然后是测试该电驱系统的动态输出特性。分别输入幅值为1 V的1 Hz和500 Hz的正弦电压信号,测量流过驱动器的电流值,如图10和图11所示。

图10 1 Hz输出电流
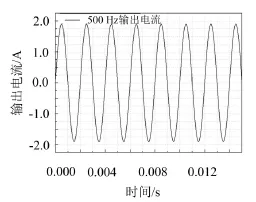
图11 500 Hz输出电流
可以发现在1 Hz的时候输出的电流波形是标准正弦波,在500 Hz的时候输出的电流正弦波在峰值处出现了失真。但是,我们在实际使用时使用的频率较低,谐波失真很小,不会产生影响。
此外,对该电驱系统的输出电流随时间的变化进行了测试,在输入电压为1 V时,记录1小时内输出电流的变化量为3 mA。

表1 电驱系统静态输入输出实验数据
最后测试了开环状态下该电驱系统驱动超磁致伸缩驱动器的动态性能。图12-图15分别是输入电压幅值为1 V、正向偏置为1 V、频率分别为1 Hz和5 Hz正弦信号时得到的驱动器输出位移曲线和对应的幅频特性曲线。

图12 1 Hz输入时输出位移

图13 1 Hz输入时输出位移的幅频特性

图14 5 Hz输出位移
GMM本身固有的磁滞特性以及环境的影响导致GMA的输出位移存在滞回性强、重复性差和非线性严重等缺陷,开环情况下的输出波形肯定存在一定失真。
以上的静动态性能测试表明,设计的电驱系统具有较大的输出功率和良好的性能。非线性度和时漂都非常小,分辨率高,动态响应性好,并且能够驱动磁致伸缩驱动器实现微振动。

图15 5 Hz输入时输出位移的幅频特性
4 结语
根据连续调整型恒流源原理,设计了超磁致伸缩驱动器的电驱系统,包括恒流驱动电路和供电电路,连续可调输出电流范围为-5A~+5A,最大输出电压±60 V,不仅能驱动较大功率的负载,而且系统的集成性高,极大的提高了超磁致伸缩器在微振动和精密定位领域的工程应用前景。实际测试结果表明:该恒流驱动电路的线性度高、分辨率高动态响应好,时漂小,并且能够驱动超磁致伸缩驱动器实现微振动的。
[1]LIU J H,JIANG C B,XU H B.Giant magne-tostritive materials[J].Science China Technological Sciences,2012, 55(5):1319-1326.
[2]CLAEYSSENF,LHERMETN,MAILLARDT. Magnetostrictiveactuatorscomparedtopiezoelectric actuators[C]Proc.SPIE conf.Smart Struct.Eng.Technol., 2003,4763:194-200.
[3]BODY C,REYNE G,MEUNIER G,et al.Appli-cation of magnetostrictive thin films for mic-rodevices[J].IEEE Transactions on Magnetics,1997,33(2):2163-2166.
[4]赵寅,杨斌堂,彭志科,等.超磁致伸缩驱动器自适应精密驱动控制研究[J].噪声与振动控制,2013,33(6):1-4.
[5]张国庆,潘仲明.基于ARM的超磁致伸缩微驱动器的偏置与驱动电路设计[J].计算机测量与控制,2012(2):477-479.
[6]葛荣杰,邬义杰,徐君,等.基于通用运放的GMA用大功率恒流驱动源设计[J].机床与液压,2008,36(2):5-7.
[7]GUO S,GAO Y,XU Y,et al.Digital PWM controller for high-frequency low-power DC-DC switching mode power supply[C].Powerelectronicsandmotioncontrol conference,2009.IPEMC′09.IEEE 6 th International.IEEE,2009:1340-1346.
[8]胡承志.超磁致伸缩驱动器电流源的设计[D].哈尔滨:哈尔滨工业大学,2010.
[9]张波,焦小芝.基于SG3525A的半桥式开关电源[J].电子与封装,2012,12(6):18-20.
Design and Implementation of the Electric Drive System for Giant Magnetostrictive Micro-vibration Control
MO Hang-jie,YANG Bin-tang,YUHu,CAO Feng-yu
(State Key Laboratory of Mechanical System and Vibration,Shanghai Jiaotong University, Shanghai 200240,China)
To realize the precise control of the micro-vibration of the giant magnetostrictive actuators,a high power program controlled electric driving system,including constant current driving circuit and power supply circuit,is designed. Firstly,the principle and the control structure of the electric driving system used in the circuit are studied.Then,the specific design of the circuit and the selection of components are described in detail.Besides,the topological structure and the specific circuit design of the power supply for the drive circuit are introduced.The experimental result shows that the linearity degree of the input voltage vs.the output current of the high power constant-current driving circuit is 0.105%;the time drift of the output current is 3 mA/h;and the frequency is up to 500 Hz.The 1 Hz and 5 Hz sinusoidal output is realized for the giant magnetostrictive actuator.Thus,the requirements of high precision and stability of the output micro-vibration of the giant magnetostrictive actuators are satisfied.
vibration and wave;micro-vibration;giant magnetostrictive actuator;driving circuit;constant-current source
O32
A
10.3969/j.issn.1006-1355.2017.02.007
1006-1355(2017)02-0033-05
2016-10-28
莫杭杰(1991-),男,浙江省湖州市人,硕士,主要研究方向为振动控制。E-mail:hangjie_mo@sjtu.edu.cn
杨斌堂,男,博士生导师。E-mail:btyang@sjtu.edu.cn