机构稳健性设计
2017-04-20李玉娟
李玉娟


【摘 要】运动副间隙普遍存在于机构中,它的不确定性常常影响着机构的运动以及动力性能。本文运用稳健性设计对含运动副间隙的函数机构进行设计。主要运用截尾混合降维法对机构的运动副间隙变量的统计量进行数学处理,然后建立数学模型,通过可稳健性设计,改善输入的不确定性对输出的性能影响,使目标函数在可靠性范围内,从而提高机构的稳健性。提出的设计方法将对机构设计水平有所提高。
【关键词】函数机构;不确定性;运动副间隙;稳健性设计
Robust Synthesis of Institutions
LI Yu-juan
(Chengdu College of University of Electronic Science and Technology of China,Chengdu Sichuan 611731,China)
【Abstract】Motion clearance widely exists in practical mechanisms,whose uncertainty affects the kinematics and dynamic performance of the mechanism.We propose a reliability robust synthesis method to design the function mechanism with motion clearance.The truncated hybrid dimension with motion clearance.The truncated hybrid dimension reduction method is used to deal with the statistical analysis of the motion clearance variables and a reliability robust synthesis model is constructed.With the reliability robust design,the design level of mechanism will be improved via making the designed performance close to the target through decreasing the influence from the input uncertainty to the output performance.
【Key words】Function mechanisms;Uncertainty;Motion clearance;Reliability robust synthesis
0 前言
在機械系统中,运动副是连接两构件的机构,并保持两构件相对运动的中间元件。运动副元件间一般需采用动配合,这就存在一定的运动副间隙。适当的运动副间隙也是保证机构灵活运转的基础。实际上,运动副间隙产生的原因有两个:一各原因是设计、制造过程中产生的,另一个原因是机构运动过程中因摩擦、磨损而产生的。实际机构中,间隙的大小是不确定的,它的不确定性影响了机构系统的运动输出,因此机构的输出精度受到运动副间隙的影响。随着科学技术的飞速发展,对机构系统的精度、效率、可靠性以及寿命的要求越来越高,为此,国内外许多学者对含运动副间隙机构做了较为深入的研究,其研究已经涉及到机构的运动学、动力学的各个方面[1]。文献[2-3]对含运动副间隙的机构运动综合进行了研究。文献[4-7]对运动副间隙对机构运动动态精度、动态性能(如震动、噪音)的影响以及机构的运动控制进行了研究。
现实机构系统中,每个机构都会受到各种不确定性因素的影响。不确定性因素包括可控因素(主要是机构的尺寸)和不可控因素(主要是指运动副间隙)。由于这些不确定性因素的影响使机构运动精度与性能下降,以至于导致机构运动失效。在现有文献中,常用概率法、最坏情况分析法和区间法处理机构中的不确定因素,在这几类处理方法中,概率方法为较成熟的方法。它依靠概率和统计特征量来创建不确定性因素的随机模型,适用于那些可靠性运用很高的场合。由于运动副间隙对运动误差的影响很复杂,故对含运动副间隙的机构运动可靠性的研究文献相对不多[8-10],其相关的理论和方法有待于深入的研究。
最近,Wang、Zhang[8]等对含运动副间隙机构的运动可靠度精度问题进行了较为系统的研究,提出了用混合降维法(Hybrid Dimension Reduction Method,HDRM)来处理含运动副间隙机构的的运动可靠性问题。邹文韬[10]等采用混合降维法对运动副间隙变量进行处理建立了平面四杆函数机构的可靠性建模与分析问题。本文在此基础上,进一步探讨考虑运动副间隙的函数机构稳健性谁。本文通过随机模型法实现稳健性设计,将随机模型转化成确定型模型求解,对于随机变量和随机函数服从正态分布时,并在离差系数较小时,是可行的,并以平面四杆函数机构为例对所提出的方法进行验证。
1 含运动副间隙机构运动误差模型
1.1 机构运动分析
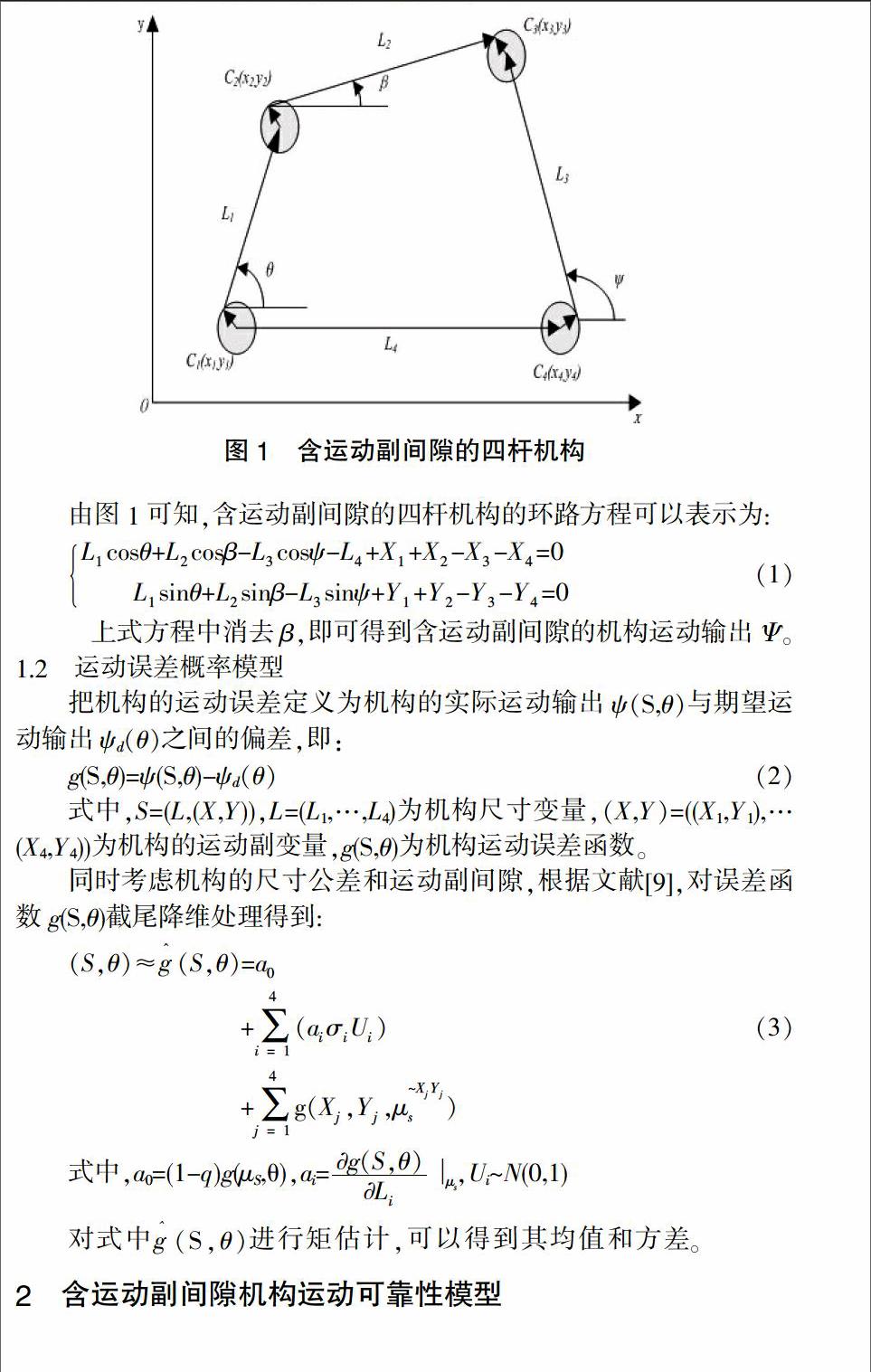
我们以含运动副间隙的平面四杆函数机构为研究对象,如图1所示。为含运动副间隙的平面四杆函数机构。曲柄转角θ作为机构运动输入,摇杆摆角ψ作为机构运动输出。假定构件尺寸L=(L1、L2、L3、L4)为服从正态分布的独立随机变量,即L~N(μL,σL),其中:均值μL=(μL■,…,μL■),方差σL=(σL■,…,σL■)。C=(C1,…,C4)为机构的四个回转副,rC表示机构回转副Ci的间隙大小,rC=rB-rJ,(其中rB表示轴承半径,rJ表示轴颈半径)。以每个轴孔几何中心为参考点建立该运动副的局部坐标系,则轴颈几何中心在其对应局部坐标系中的位置为Ci(Xi,Yi),(i=1,…,4)。假设变量Xi、Yi在间隙圆内服从均匀分布[8-10]。
4 实例分析
设用图1所示曲柄摇杆机构实现的反正切函数为y=arctant(t∈[t0,tf]=[0,1])。机构运动输入输出范围分别为Δθ=θf-θ0=100°和Δψd=ψdf-ψd0=45°。设机构的尺寸变量Li(i=1,…,4)服从正态分布,其标准差σLi=0.05,设机构运动副间隙Cj(Xj,Yj)服从均匀分布,间隙半径rC=0.02mm。机构运动输出的允许误差极限为ε=0.4°。设机构运动精度允许可靠度pf*,机构转角为γ=[20°,160°]。设定确定性优化的初始设计点为Z0=(20mm,120mm,80mm,95°,90°),由于机构杆长不影响函数生成的精度,设定机构AD的长度L4=100mm。設计变量取值范围的下限为ZL=(20mm,20mm,20mm,0°,0°)和上限为ZU=(450mm,500mm,500mm,360°,360°)。图2确定性设计和概率设计所得机构的运动失效概率。图3为确定性设计和概率设计所得机构的结构误差。从图2可以看出稳健性设计的失效概率明显小于确定性设计的失效概率,提高了机构运动可靠性。对比图2和图3可以看出通过可靠稳健性设计后,机构的概率设计在允许误差的范围内使得机构运动误差重新分配,通过减小失效概率敏感点的误差均值进而降低机构的运动失效概率。
5 结论
以考虑运动副间隙失效概率的机构运动可靠性设计为基础,把设计变量视为随机变量,把稳健性化为标准偏差,使稳健性机构的标准偏差值最小,并将可靠性引入机构运动稳健设计作为性能概率设计。数值视力表明,稳健性设计的失效概率明显小于确定性设计的失效概率,提高了机构运动可靠性。可靠性稳健设计方法在考虑不确定性因素(尺寸公差与运动副间隙)的条件下、通过调整设计变量与同时控制允许的最大偏差的方法来获得稳健性设计问题的最优解。因此本文的研究为真实机构系统的设计奠定了基础。
【参考文献】
[1]Zhu J,Ting KL.Uncertainty analysis of planar and spatial robots with joint clearances[J].Mechanism and Machine Theory,2000,35:1239-1256.
[2]Feng B,Morita N,Torii T.A New Optimization Method for Dynamic Design of Planar Linkage with Clearances at Joints[J].Journal of Mechanical Design,2002, 124:68-73.
[3]Erkaya S,Uzmay I.Determining link parameters using genetic algorithm in mechanisms with joint clearance[J].Mechanism and Machine Theory,2009,44:222-234.
[4]Tian Q,Zhang Y Q,Chen L P,et al.Dynamics of Spatial Flexible Multibody Systems with Clearance and Lubricated Spherical Joints[J].Computers and Structures,2009,87:913-929.
[5]Schwab A L,Meijaard J P,Meijers P.A Comparison of Revolute Joint Clearance Model in the Dynamic Analysis of Rigid and Elastic Mechanical Systems[J]. Mechanism and Machine Theory,2002,37(9):895-913.
[6]Flores P.A parametric study on the dynamic response of planar multibody systems with multiple clearance joints[J].Nonlinear Dynamics,2010,61:633- 653.
[7]Erkaya S,Uzmay I.Investigation on effect of joint clearance on dynamics of four-bar mechanism[J].Nonlinear Dynamics,2009(58):179-198.
[8]Wang Jin-ge,Zhang Jun-fu,Du Xiao-ping.Hybrid dimension reduction for mechanism reliability analysis with random joint clearances[J].Mechanism and Machine Theory,2011,46(10):1396-1410.
[9]黄玮,冯蕴雯,吕震宙,等.考虑铰链运动副间隙的机构运动可靠性分析模型[J]. 机械强度, 2007,29(2):264-268.
[10]邹文韬,王志刚,张均富.含运动副间隙的平面函数机构运动点可靠性分析[J].工程设计学报,2013,20(5):409-413.
[责任编辑:田吉捷]
