背负式大白菜收获机的研制
2017-04-20李向军赵大勇张宝库王明军
李向军,赵大勇,张宝库,王明军
(哈尔滨市农业科学院,哈尔滨 150029)
目前我国大白菜的生产和收获主要依靠人工进行。尤其是大白菜收获作业,人工先要用菜刀等工具将大白菜根部切断,然后再拣拾、摆放、装车运输等,不仅劳动强度大,浪费大量人力、物力、财力,而且工作效率十分低下,难以满足大规模生产需要。国内在大白菜机械化收获方面的研究非常少,由于各地区种植模式和各品种大白菜物理特性及几何形状的不同,现有几种机型专用性强、通用性差,且存在结构复杂、智能化程度低、作业时易堵塞等问题,难以保证大白菜收获质量。为此,在分析我国大白菜机械化收获技术现状基础上,创新研制出一种适用于黑龙江地区大白菜种植模式的收获机,该机具可以快速完成切根、捡拾、摆放、装车运输等多项作业,降低了人工劳动强度,提高了大白菜的收获效率,弥补了大白菜机械化生产技术领域的空白。
1 总体设计及工作过程
1.1 整体结构
背负式大白菜收获机主要由自动仿形机构、夹持机构、切割机构、运输机构、装车机构、主体框架、液压传动总成等部分组成(如图1所示),一次进地能够完成自动仿形夹持、切割、纵向运输、横向运输、侧向装车等多项作业。
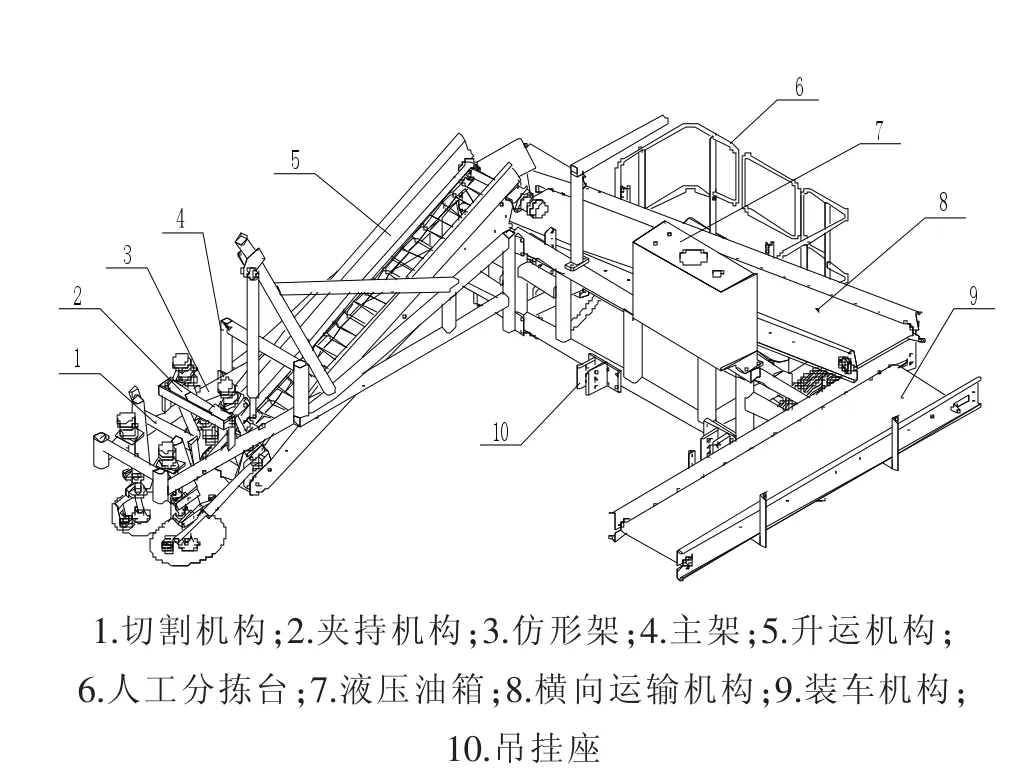
图1 背负式大白菜收获机整体结构示意图Figure 1 Overall structural diagram of knapsack cabbage harvester
1.2 工作过程
该机具的工作过程为:用两边对称的夹持机构扶正并夹持住大白菜,用对称放置的高速旋转圆盘切刀将大白菜根部切断,经升运机构将大白菜运输到人工捡拾的工作带上,由人工分选处理,然后或装箱或由装车机构进行装车,完成大白菜的收获作业。
1.3 技术参数
该机具的主要技术参数见表1。

表1 主要技术参数Table 1 Main technical parameter
2 主要工作部件的设计
2.1 夹持机构
夹持机构的结构如图2所示。由于大白菜叶含水率较大,收获时容易破碎,所以采用厚度H=15 mm、宽度B=80 mm、长度L=1 700 mm的两条高密度柔性皮带进行夹持,既能稳稳夹住大白菜进行运送,又能保护大白菜不受损坏,保证收获后大白菜的外观质量。根据黑龙江省大白菜种植品种现状,多数大白菜的质量为4 kg/颗左右。由于大白菜质量较大,在收获时皮带容易脱落;同时,在收获过程中难免有白菜叶落入夹持主动轮和皮带中间,经过挤压后渗出大量水分,导致皮带出现打滑现象。针对以上两种情况,在皮带中间位置加装一条齿状C型带,既能导向防止皮带竖向下滑,又能强制驱动皮带防止打滑现象发生。

图2 夹持机构结构示意图Figure 2 Structural diagram of clam ping device
2.2 切割机构
切割机构的动力来源于2个液压马达,工作时高速旋转的马达驱动切割盘进行切割作业。切割盘采用2个缺口圆盘,直径D=350 mm、曲率半径ρ=600 mm、厚度δ=3 mm。该圆盘起到两方面作用:一是对白菜根部进行切割;二是利用圆盘弧面与地表接触起到限深作用,保证白菜根部切削一致。切割机构具体结构如图3所示。
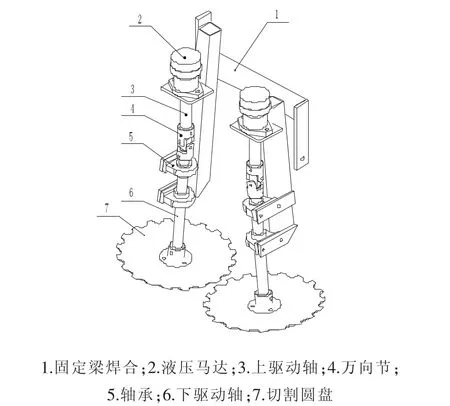
图3 切割机构结构示意图Figure 3 Structural diagram of mechanism of cutting device
2.3 升运机构
升运机构的升运角θ=25°。为有效防止大白菜在升运过程中向下滚动,采用凸凹式杆条输送链(如图4所示),2个凸杆条的安装间距为356 mm,中间均匀分布3个凹杆条,凸凹杆的上下间距为52 mm。根据黑龙江主要大白菜品种的外形尺寸,多数大白菜直径D=350 mm,所以设定输送链的宽度B=381 mm。
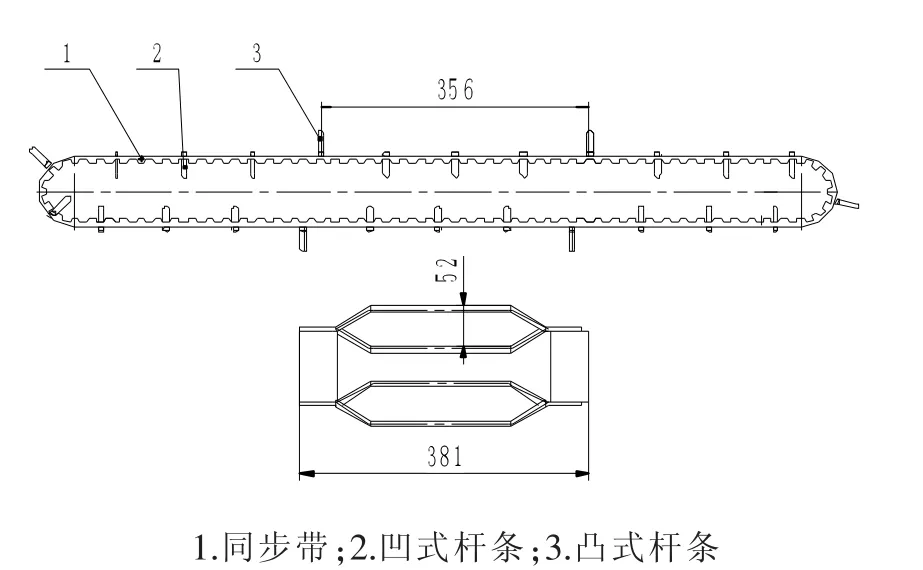
图4 升运链结构示意图Figure 4 Structural diagram of the lifting chain
2.4 运输机构
输送带的运行速度是大白菜收获机设计时的重要参数之一。当带宽一定时,输送量越大,带速越要降低,尤其是倾角较大的输送装置。根据实际作业要求,设定输送倾角 θ=10 °、 带速 v=0.4 m/s,输送带规格长×宽=6 300 mm×500 mm,且输送带表面贴有间距350 mm、尺寸350 mm×30 mm的挡条,以防止大白菜向下滚动。由于大白菜质量较小,所以输送机构的功率消耗较小,输送机构的功率主要消耗在大白菜运输及滚筒自身的转动方面。正常运转时,输送带上可运载30 kg的大白菜。大白菜受力情况如图5所示,则有:F=G cos10≈30(N),所以运输白菜消耗的功率为:p=Fv=30×0.4=0.012(kW)

图5 输送带上大白菜的受力图Figure 5 Stress diagram of cabbage on conveyor belt
输送带滚筒按作用的不同,可分为驱动滚筒和从动滚筒。该机具设计中,驱动和从动滚筒结构相同,包角为180°,主体直径为80 mm,长度为510 mm,具体结构如图6所示。

图6 滚筒结构示意图Figure 6 Structural diagram of the roller
可得滚筒驱动轴转速n为:

式中:n为滚筒驱动轴转速;v为带速;d为滚筒直径。
3 性能试验
背负式大白菜收获机设计制造完成后,在哈尔滨市农业科学院白菜种植基地进行田间性能试验(如图7所示)。该机具采用纽荷兰110-90拖拉机进行3点挂接。试验效果表明:所设计的收获机能够满足白菜的收获要求;其工作效率是人工效率的4倍。

图7 大白菜收获机田间试验现场图Figure 7 Field test of cabbage harvester
4 结语
背负式大白菜收获机结构简单,操作方便,具有很高的收获完整度,能满足行距65~70 cm、株距35~45 cm的单行种植大白菜的收获要求。田间性能试验结果证明该机具具有以下特点:1)采用拖拉机三点挂接,地头转弯半径小,操作灵活,适于大中小不同地块的大白菜收获作业。2)圆盘切刀在切割的同时利用其弧面实现自动仿形,保证大白菜根部切削长度一致。3)一次进地可以完成夹持、切割、分选、集装等多项工作,实现大白菜的高效、高质量收获作业。4)所设计的液压控制系统工作平稳可靠,满足收获机的要求。
[1]王俊,杜冬冬,胡金冰,等.蔬菜机械化收获技术及其发展[J].农业机械学报,2014(2):81-87.
[2]徐少华,孙登峰,陈建华,等.叶类蔬菜通用收获机的设计[J].农业工程与信息技术,2015(3):365-367.
[3]姚会玲.大白菜收获机关键部件的研究[D].北京:中国农业大学,2007.
[4]王志强,郭维俊,王芬娥,等.4YB-Ⅰ型甘蓝收获机的总体设计[J].甘肃农业大学学报,2011(3):126-130.
[5]中国农业机械化科学研究院.农业机械设计手册:上册[M].北京:机械工业出版社,2007.
