大比例尺航天测绘系统体制研究
2017-04-19莫凡曹海翊刘希刚张新伟高洪涛黄缙
莫凡 曹海翊 刘希刚 张新伟 高洪涛 黄缙
(北京空间飞行器总体设计部,北京 100094)
大比例尺航天测绘系统体制研究
莫凡 曹海翊 刘希刚 张新伟 高洪涛 黄缙
(北京空间飞行器总体设计部,北京 100094)
航天测绘可通过多台线阵相机立体成像、单台线阵相机姿态机动成像、面阵相机立体成像等多种体制实现。文章针对大比例尺(1∶5000~1∶2000)航天测绘任务的实际应用需求,提出了降轨双线阵立体成像、双星编队立体成像等新型实现体制,从原理上分析了不同体制的技术特点,研究了不同体制对于系统设计、有效载荷、卫星平台、地面处理等环节的要求,从测绘效率、测绘精度、工程实现难度等方面对可行的体制进行了比较,可为我国大比例尺航天测绘系统建设提供参考。
大比例尺;航天测绘;立体成像卫星;测绘体制
1 引言
基础地理信息是我国数据量最大、覆盖面最宽、应用面最广的信息资源之一,其中,1∶5000、1∶2000等大比例尺地形图,能够同时提供目标的高分辨率地理环境影像信息及目标的精确定位数据,具有广泛的经济、社会发展用途和军事用途。测绘我国境内及全球重点、热点地区大比例尺的地形图产品,能够有效满足我国国民经济建设对于城市地区大比例尺地形图的需要以及全球范围重要目标区精确测绘的战略需求。
航天测绘一般通过摄影测量的方式实现,即利用摄影手段获取目标物的影像数据,从中提取空间物体的几何信息,其比例尺与图像分辨率、几何定位精度直接相关,而后者又与卫星轨道高度、平台控制精度及相机的内部精度等相关。近年来,国外中大比例尺测绘卫星呈现快速发展趋势,美国等国家的高水平卫星得益于其先进的有效载荷、高精度定姿与定轨等技术,能够实现米级的无地面控制几何定位精度,具有测制1∶5000比例尺地图的能力[1]。国内目前广泛应用航空影像绘制1∶5000等大比例尺地理信息产品,但随着航天技术的发展,我国发展大比例尺卫星测绘,实现优于0.5 m全色、2 m多光谱的甚高分辨率光学立体测绘能力是一种必然,以满足日益迫切的1∶5000~1∶2000比例尺地形图和基础地理信息生产的需要[2]。国内外航天测绘大多采用了单星多线阵和单星单线阵的技术体制[3],但随着比例尺的进一步增大,精度的进一步提高,仅靠现有体制已经不能完全满足大比例尺地形图测制的需求。
本文围绕大比例尺立体测绘任务,在航天领域目前常用的测绘体制基础上,提出了新型体制,并对不同的体制开展了全方位研究,给出了工程实现性最优的建议,可为我国发展大比例尺测绘卫星提供参考。
2 技术路线概述
航天测绘任务需要通过立体影像获取高程信息。对于大比例尺测绘,需要实现米级无控制点定位精度和亚米级图像分辨率,如果采用类似日本先进陆地观测卫星(ALOS)、中国资源三号卫星的三线阵测绘体制,需要安装3台分辨率优于0.5 m的高精度相机用于立体影像的获取,相机规模大,远远超出现有卫星平台的承载能力,工程上不具备可实现性。因此,综合考虑技术本身的可行性并参考国外高精度光学遥感卫星的实现方式,提出单星双线阵、单星单线阵、单星面阵和双星编队4类立体成像体制,在此基础上研究了每种体制对应的实现方式,其技术路线图如图1所示。
3 测绘体制研究
3.1 单星实现立体成像
3.1.1 基于双线阵体制的立体成像方式
双线阵立体成像属于传统的立体测绘卫星成像模式,卫星上安装2台具有一定夹角的线阵相机,在同一轨道周期内通过不同角度观测同一地物形成立体像对,最终得到平面和高程信息。该成像体制使得卫星可连续观测获取地面重叠影像,测绘效率较高,而且2台相机安装在同一基准上,相机夹角在轨可维持较高的稳定性,有利于高定位精度的实现。双线阵立体成像示意见图2。
1)常规双线阵立体成像
目前国内已发射的资源三号、天绘一号等测绘卫星均选择了高度为500 km左右的太阳同步轨道。因此,常规双线阵立体成像体制,是指选择在500 km左右高度的常规轨道下利用双线阵相机获取立体影像的测绘体制。
常规双线阵测绘体制的优点,在于两台相机之间通过高稳定支撑结构固连,在轨稳定性可以得到较好保证,而且对于轨道维持能力、姿态机动能力需求不大,利于工程实现。同时,相比于单线阵立体成像的方式,由于卫星一次成像可同时获取两个不同角度的观测影像,其效率相对较高,更适用于大区域测绘。不过,满足大比例尺测绘任务要求的高精度双线阵相机规模较大,对于卫星平台的承载要求极高。
以实现1∶5000比例尺测绘任务为例,常规双线阵体制的关键技术指标需求如表1所示。
此外,考虑到常规双线阵体制实现大比例尺测绘对外方位元素误差的要求极为严格,其中角元素的误差量级必须达到亚角秒级,因此,可以考虑在星上配置激光测距仪,在成像期间获取部分地物点的高度信息,地面处理时参与图像平差,能够有效提高图像的高程定位精度。
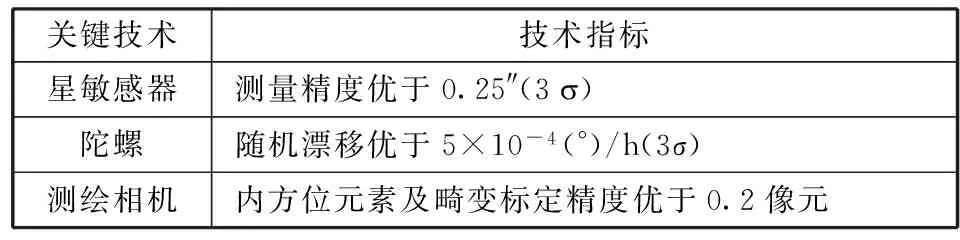
表1 常规双线阵关键技术指标需求Table 1 Pivotal technique specification requirement of regular bi-linear array system
2)降轨双线阵立体成像
降轨双线阵立体成像体制,是指将常规双线阵立体成像卫星的轨道高度从500 km左右降至300~350 km太阳同步近圆轨道的测绘体制。
降轨后有效载荷可在常规轨道实现1∶10 000比例尺测绘任务的测绘相机基础上适应性修改,载荷研制难度大大降低,质量也只有常规体制载荷的1/2左右,对于卫星平台及运载火箭承载能力的要求降低。而且,根据文献[4]给出的空间交会高程误差计算公式,轨道高度降低后高程误差同步下降,因此轨道降低后外方位元素中角元素对定位精度的影响程度明显降低,相比常规轨道的体制,可适当放宽对其的精度要求,更利于工程实现。空间交会高程误差计算公式为
(1)
式中:σh为高程误差;H为轨道高度;B为基线长度;σφ、σk分别为星测俯仰轴、偏航轴角元素误差;α为前视/后视角度;Y为成像幅宽的一半;p为地面像元分辨率;σZ为摄站线元素误差,σZ相比角元素误差来说影响较小。
不过,降轨后轨道半长轴衰减较快,对卫星平台的推进能力要求很高。以在轨寿命8年的典型遥感卫星为例,在300km、325km和350km三种典型轨道高度下双组元燃料需求量的计算结果如表2所示。其中,燃料需求量的大部分用于轨道维持,其余用于初轨捕获、寿命期间姿态控制等。可以看出,对于降轨体制,化学推进方式需要的燃料量过大,已不具有工程可实现性,必须考虑效率更高的推进方式。

表2 典型遥感卫星降轨后轨道维持所需双组元燃料量Table 2 Bipropellant fuel requirement for orbit maintain of typical remote sensing satellite after orbit descending kg
若采用比冲达到3000 s的电推进系统,推进效率相比双组元推进系统大大提高,燃料携带量大幅度减少[5],不同轨道高度所需燃料量如表3所示。
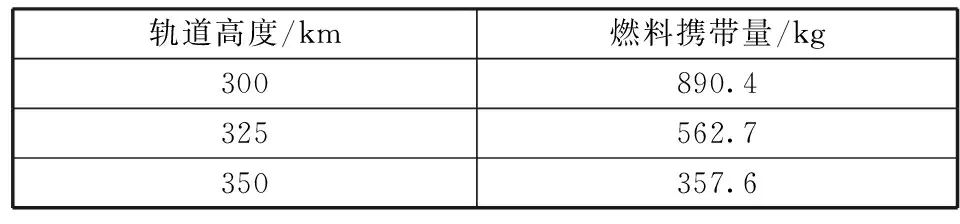
表3 采用电推进系统所需燃料量Table 3 Fuel requirement for electric propulsion system
在使用两台推力为160 mN的电推力器的前提下,每圈需要轨控时间的计算结果如表4所示。即使按照衰减速度最快的300 km轨道考虑,每圈也仅需24 min执行轨控任务,不到整圈时间的1/3,留给执行测绘成像任务的时间十分充裕。且通过增加基于成像任务规划的自主轨控功能,可以有效减少地面干预的工作量。

表4 降轨后平均每圈所需轨控时间Table 4 Average time requirement of orbit maintain after orbit descending
3)单镜头双线阵立体成像
利用单镜头双线阵测绘相机可以获取基高比小于0.1的立体影像,其优点是可以避免常规大基高比立体测绘存在的多次成像辐射差异、高层建筑物遮挡、几何变形等问题[6],可实现城市和复杂地区多尺度全方位立体测绘。
我国目前的航天测绘系统为了获得满足要求的高程精度,基本上都采用大基高比(约为0.6~1)的方案。对于复杂地物尤其是城市地区而言,由于建筑物密集、高低起伏变化大等特点,利用传统大基高比进行城市测绘将带来很多不利因素,主要包括摄影死区多(如图3所示)、几何变形大、辐射对比差异大、图像匹配相关性小等。
不过,基高比变小对高程精度影响较大,为实现大比例尺测绘要求的精度指标,需要解决一系列的关键问题,例如实现优于1/30像元的匹配精度、确保二维离散采样的保真度、设计与研制单镜头双线阵高分辨率测绘相机系统等。
3.1.2 基于单线阵体制的立体成像方式
单线阵测绘体制需要通过调整卫星姿态来调整相机的光轴指向,以获得同一地物、不同观测方向的重叠影像,构成立体像对,如图4所示。
这种成像模式对卫星平台的姿态机动能力提出了较高要求,不仅需要具备滚动和俯仰轴姿态快速机动的能力或者持续跟踪预定角速度曲线的能力,还要求姿态机动时间尽量缩短,以提高立体测绘效率[7]。
1)单线阵被动推扫立体成像
单线阵被动推扫立体成像体制是指卫星配置单台单线阵相机,通过快速姿态机动调整相机指向,以获得同一地物、不同观测方向的重叠影像的测绘体制,如图5所示。该体制下,卫星在成像过程中不做姿态机动。
相比多线阵测绘体制,单线阵机动成像使得有效载荷的规模大幅度减小,解决了安装多台相机导致平台承载能力要求过高的问题。同时,该体制可以较为灵活地实现立体测绘,不仅可以采用多种角度完成观测任务,实现可调基高比,还可以采用同轨和异轨两种方式形成立体影像。
以实现1∶5000比例尺测绘任务为例,单线阵被动推扫体制的关键技术指标需求如表5所示。
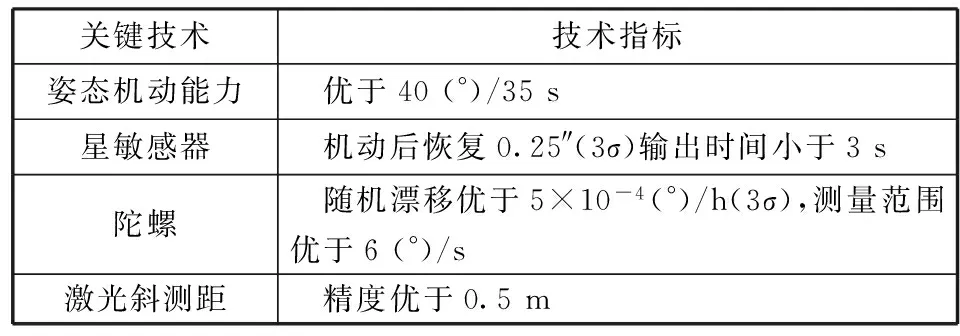
表5 单线阵被动推扫关键技术指标需求Table 5 Pivotal technique specification requirement of single-linear array passive push-broom system
该体制存在的主要问题是测绘效率不高以及技术实现难度大。与双线阵体制相比,效率仅达到20%~30%,且对卫星机动前后甚至过程中的姿态稳定度及指向精度均有较高要求,系统控制难度较大,此外,卫星机动过程前后还应保证定轨、定姿等高精度测量设备能够具备正常工作状态,单机设备研制难度较大。
2)单线阵主动推扫立体成像
单线阵主动推扫立体成像体制是指卫星配置单台单线阵相机,正向正常推扫后,结合姿态机动建立反向扫描速度,获得同一地物、不同观测方向的重叠影像的测绘体制。该体制下,卫星第二次成像为动中成像。
如图6所示,卫星在由位置1飞行至位置2的过程中成像且不做姿态机动,由位置2飞行至位置3的过程中俯仰机动建立反向姿态,由位置3飞行至位置4的过程中平台提供反向扫描速度同时卫星成像。在具体方案设计中,位置3与位置4之间卫星跟踪预定的角速度曲线,以实现反向主动推扫地速与正向正常推扫地速相等,保证相机的积分时间与正向推扫相同。
此模式在姿态机动能力相当的前提下,相比单线阵被动推扫立体成像能够扫描更多的条带,实现更大的成像范围。经过仿真分析,效率可达到双线阵体制的70%~80%。此模式对平台能力要求更高,要求卫星在沿迹反方向通过俯仰机动建立预定的主动回摆角速度,以满足TDICCD相机成像要求,还要求相机的TDICCD器件具有正反双向推扫成像的功能。
以实现1∶5000比例尺测绘任务为例,单线阵主动推扫体制的关键技术指标需求如表6所示。
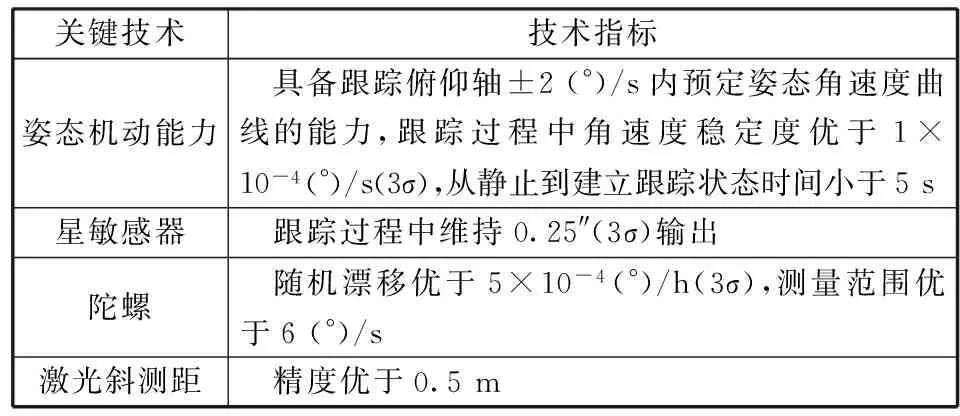
表6 单线阵主动推扫关键技术指标需求Table 6 Pivotal technique specification requirement of single-linear array initiative push-broom system
3.1.3 基于面阵体制的立体成像方式
面阵成像类似传统框幅式成像原理,能够在很短的曝光时间内对指向的大面积区域进行成像,每幅图像内各像点的空间几何关系十分严格,对卫星外方位元素要求低,相对线阵方式更易于实现高精度测绘[8],如图7所示。存在的问题是大尺寸面阵器件难以获得,可以考虑通过多面阵拼接或者敏捷拼幅的方式降低对面阵器件的尺寸要求。
1)多面阵拼接立体成像
多面阵拼接立体成像体制是指测绘相机中多个小的面阵CCD芯片拼接成大面阵,使相机成像覆盖范围实现任务要求指标,进而利用面阵像对获取立体影像的测绘体制,如图8所示。
多个CCD拼接目前主要有3种实现途径,包括CCD视场拼接方式、CCD棱镜拼接方式和反射式拼接方式。考虑到CCD视场拼接方式不是同一时刻曝光,测绘应用地面处理时较为复杂,一般采用棱镜拼接和全反射式拼接方式。
在实际工程应用中,需要攻克面阵拼接工艺、相机双向大视场等技术难点[9],同时还需要解决大视场相机低畸变及其稳定性问题。
2)单面阵敏捷拼幅立体成像
单面阵敏捷拼幅立体成像体制是指卫星配置不经CCD拼接的单面阵测绘相机,通过多次快速姿态机动调整相机指向,以获取满足地面覆盖范围要求的立体影像的测绘体制,如图9所示。
采用单面阵相机可以避免难度较大的面阵CCD拼接工艺问题以及接缝处的图像处理问题,该方式首先通过姿态敏捷机动的方式进行同轨多条带拼幅成像,以扩大成像幅宽,此后利用俯仰机动实现对上述条带的不同角度观测,利用重叠影像构成立体像对。但在实际应用中,存在首次和末次成像角度较大、测绘效率不高、对卫星平台敏捷机动能力要求高等问题。
3.2 双星实现立体成像
双星编队立体成像是指用两颗单线阵卫星在同轨或异轨通过不同角度观测同一地物,获得不同观测方向重叠影像,构成立体像对的方式,见图10。该体制相比单星双线阵模式,单颗卫星有效载荷规模小,平台易于承载,并且同轨或异轨立体成像方式使得测绘方式更为灵活;相比单星单线阵姿态机动模式,无须机动即可推扫立体像对,不用考虑解决难度较大的姿态机动及稳定过程中保持高定位精度的问题。
处理两颗卫星拍摄得到的立体像对时,需要高精度地确定双星的星间距离以作为测量基线。基线的确定可以通过单星的双频GPS精密定轨直接实现,也可以通过星间测距的方式实现[10]。后者的主要手段包括GPS星间测距、激光星间测距和K频段测距(K Band Ranging,KBR)3种。其中,GPS星间测距需要由一颗卫星向另一颗卫星发送自身采集的GPS原始测量数据,通过相对差分计算,给出双星的相对位置、相对速度等信息;激光星间测距采用有源激光雷达,直接获取双星距离;KBR星间测距通过两颗卫星互相发射和接收K/Ka频段连续微波信号,并测量相位的变化,从而测量出双星距离。上述3种星间基线的测量方法有各自的适用范围和测量精度,表7中进行了总结,可以看出,KBR测距具有一定优势。
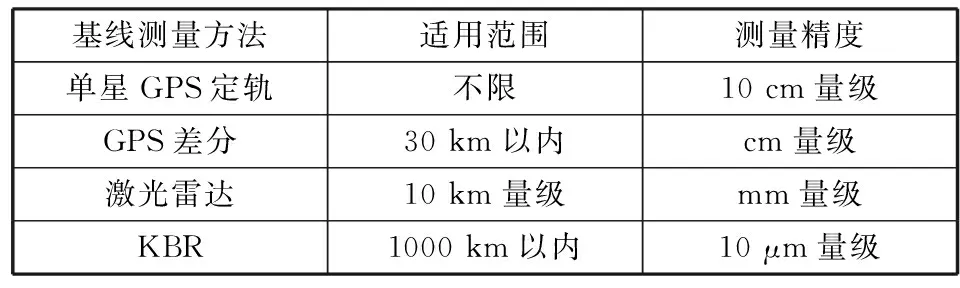
基线测量方法适用范围测量精度单星GPS定轨不限10cm量级GPS差分30km以内cm量级激光雷达10km量级mm量级KBR1000km以内10μm量级
4 各体制优缺点比较
本文提出的8种大比例尺测绘实现方式中,常规双线阵、降轨双线阵、单镜头双线阵、单线阵被动推扫和双星编队5种方式,相比其它3种方式更为可行。现从测绘效率、测绘精度等方面对5种体制进行比较,为体制选择提供参考。
假设卫星轨道高度500 km,单次成像工作时间10 min,前后视成像方向夹角为31°,卫星姿态测量误差为0.4″,姿态稳定度为3×10-5(°)/s,轨道测量误差为0.1 m,相机夹角稳定性为0.1″。测绘效率、测绘精度和工程实现难度的比较结果见图11、表8和表9。
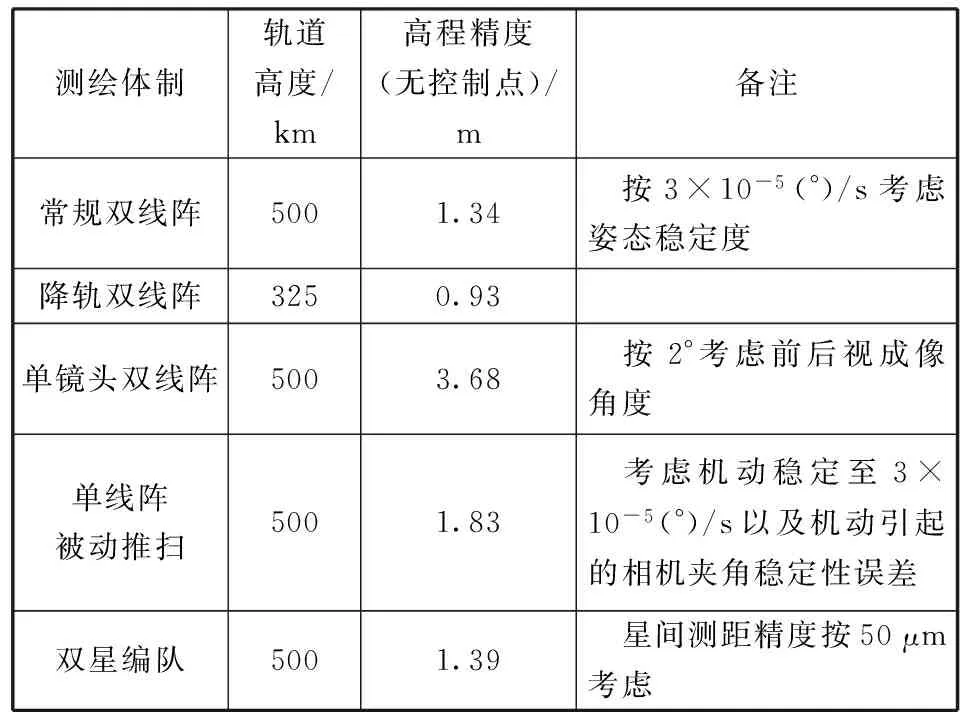
测绘体制轨道高度/km高程精度(无控制点)/m备注常规双线阵5001.34 按3×10-5(°)/s考虑姿态稳定度降轨双线阵3250.93单镜头双线阵5003.68 按2°考虑前后视成像角度单线阵被动推扫5001.83 考虑机动稳定至3×10-5(°)/s以及机动引起的相机夹角稳定性误差双星编队5001.39 星间测距精度按50μm考虑

表9 工程实现难度比较Table 9 Comparison of project implementation difficulty
从对比结果来看,单镜头双线阵体制测绘精度较差,双星编队体制成本较高,而常规双线阵体制对卫星有效载荷、平台和运载火箭均要求较高。因此,降轨双线阵、单线阵被动推扫是更为适合大比例尺航天测绘的体制。
5 结论
随着我国经济的高速发展,地理信息产业已经成为国民经济新的增长点,对大比例尺测绘影像的需求异常迫切。现阶段,民用空间基础设施建设稳步推进,卫星研制水平不断提升,逐步攻克了面向1∶50 000~1∶10 000比例尺测绘应用的米级、亚米级光学卫星总体设计和单机研制的核心技术,推动了我国航天测绘水平的进步。
然而不可否认的是,在面向1∶5000~1∶2000大比例尺测绘应用的光学遥感卫星技术领域,尚面临诸多亟待突破的瓶颈和难题,其中首要的就是测绘体制选择问题。体制选择的目的是确定大比例尺测绘卫星采用的技术路线,是卫星工程研制的基础,决定了卫星的总体方案和需要攻关的关键技术。
本文以实现大比例尺航天测绘任务为前提,研究了多种测绘体制的技术特点与应用需求。在提出降轨双线阵、双星编队等新型体制的同时,对各体制的优缺点进行了比较。分析结果表明:降轨双线阵体制能够实现优于1 m的高程定位精度,单线阵被动推扫体制可有效避免卫星平台的承载能力局限且使用方式更为灵活。上述两种体制技术原理清晰、工程途径可行,是大比例尺测绘任务可以采用的体制。
References)
[1] 郭连惠,喻夏琼. 国外测绘卫星发展综述[J]. 测绘技术装备,2013,15(3):86-88
Guo Lianhui,Yu Xiaqiong. Evolution overview of oversea surveying and mapping satellites[J]. Geomatics Technology and Equipment,2013,15(3): 86-88 (in Chinese)
[2]孙承志,唐新明,翟亮. 我国测绘卫星的发展思路和应用展望[J]. 测绘科学,2009,34(2):5-7
Sun Chengzhi,Tang Xinming,Zhai Liang. Development ideas and application prospects of surveying and mapping satellite in China[J]. Science of Surveying and Mapping,2009,34(2): 5-7 (in Chinese)
[3]余俊鹏,孙世君. 卫星摄影测量观测技术发展的若干思路[C]// 第二十三届全国空间探测学术交流会. 北京:中国空间科学学会,2010:1-6
Yu Junpeng,Sun Shijun. Some thoughts on the development of photogrammetry technique[C]// The 23th Nationwide Space Exploration Seminar. Beijing: Chinese Society of Space Research,2010: 1-6 (in Chinese)
[4]王任享,李晶,王新义.等. 无地面控制点卫星摄影测量高程误差估算[J]. 测绘科学,2005,30(3):9-11
Wang Renxiang,Li Jing,Wang Xinyi.et al. Elevation error estimation of satellite photogrammetry without ground control point[J]. Science of Surveying and Mapping,2005,30(3): 9-11 (in Chinese)
[5]吴汉基,蒋远大,张志远. 电推进技术的应用与发展趋势[J]. 推进技术,2003,24(5):385-392
Wu Hanji,Jiang Yuanda,Zhang Zhiyuan. Application and development trend of electric propulsion technology[J]. Journal of Propulsion Technology,2003,24(5): 385-392 (in Chinese)
[6]Delon J,Rouge B. Small baseline stereovision[R]. Paris: J Math Imaging VIS,2007
[7]张新伟,戴君,刘付强. 敏捷遥感卫星工作模式研究[J]. 航天器工程,2011,20(4):32-38
Zhang Xinwei,Dai Jun,Liu Fuqiang. Research on working mode of remote sensing satellite with agile attitude control[J]. Spacecraft Engineering,2011,20(4): 32-38 (in Chinese)
[8]方勇,李瀛搏,崔卫平.等. 高分辨率大面阵相机航天测绘应用立体探测模式分析[J]. 测绘科学技术学报,2011,28(4):235-240
Fang Yong,Li Yingbo,Cui Weiping,et al. Application modes analysis of high resolution large plane array digital camera in space photogrammetry[J]. Journal of Geomatics Science and Technology,2011,28(4): 235-240 (in Chinese)
[9]王任享. 论不同航天摄影测量传感器的摄影测量性能[J]. 武汉大学学报信息科学版,2001,26(2):95-100
Wang Renxiang. Discussion on photogrammetry performance of different aerial photogrammetry sensors[J]. Geomatics and Information Science of Wuhan University,2001,26(2): 95-100 (in Chinese)
[10] 刘洋. 编队卫星的星间基线确定方法研究[D]. 长沙:国防科学技术大学,2007
Liu Yang. Research on determination method for inter-satellite baseline of satellite formation[D]. Changsha: National University of Defense Technology,2007 (in Chinese)
(编辑:张小琳)
Research on Space Mapping System with Large Scale
MO Fan CAO Haiyi LIU Xigang ZHANG Xinwei GAO Hongtao HUANG Jin
(Beijing Institute of Spacecraft System Engineering,Beijing 100094,China)
Space mapping can be achieved through a variety of ways,such as stereo imaging by multiple linear array cameras,attitude maneuver imaging by single linear array camera,stereo imaging by plane array camera and so on. In view of the practical application requirements of large scale(1∶5000~1∶2000) space mapping mission,new systems are brough forth,such as stereo imaging by orbit descending bi-linear array and stereo imaging by bi-satellite formation. The technical characteristics of different systems are analyzed in principle,and the requirements of diffe-rent systems for the design of satellite system,payload,satellite platform,ground data processing and so on are studied. The feasibility of systems is compared from the aspects of mapping efficiency,mapping accuracy,project implementation difficulty,and so on. This reaseach of the paper provides reference for the construction of large scale space mapping system in China.
large scale; space mapping; stereo imaging satellite; mapping system
2016-12-29;
2017-01-16
莫凡,男,工程师,从事遥感卫星总体设计工作。Email:376780908@qq.com。
V474.2
A
10.3969/j.issn.1673-8748.2017.01.003
