永磁同步电机伺服驱动系统实验平台设计
2017-04-08沈震张成德刘巧棣
沈震++张成德++刘巧棣
摘要:近些年来,交流伺服系统在工控、军工、民用、医疗等领域的应用十分广泛。对于永磁同步电机伺服系统,除了要求具有动态响应迅速、稳态运行可靠的特性外,还要求系统能够实现准确定位和快速跟踪。本文从硬件设计和软件设计两部分分析永磁同步电机伺服驱动系统的具体实现方案,结合永磁同步电机伺服驱动系统硬件实验平台开发了电机驱动系统测试软件,并进行了电机驱动控制系统的调试实验。
关键词:永磁同步电机;DSP芯片;实验验证
中图分类号:TM351 文献标识码:A 文章编号:1007-9416(2017)02-0016-01
1 引言
近些年来,交流伺服系统在工控、军工、民用、医疗等领域的应用十分广泛。对于永磁同步电机伺服系统,除了要求具有动态响应迅速、稳态运行可靠的特性外,还要求系统能够实现准确定位和快速跟踪。本文结合永磁同步电机伺服驱动系统实验平台开发设计,将模糊控制和传统PID控制相结合,使系统既具有模糊控制灵活而适应性强的优点,又具有PI控制精度高的特点。
2 实验平台硬件设计
永磁同步电机驱动控制系统实验平台硬件由驱动电源电压的整流和逆变模块、反馈信号(位置、电流)检测模块以及相应的硬件保护等模块组成。本设计采用的DSP芯片为TI公司的TMS320F28335,这是一款浮点类型的处理器,主频高能高效率运行负载控制算法,尤其是矢量控制算法以及高频率电流环处理的采集运算,大量传感器模拟和数字信号滤波计算等实时控制。
2.1 主电路
主电路是驱动系统能量转换的通路,用来将电能直接转化为驱动伺服电机转动转矩的机械能。采用交流直流交流方式将电能转化的结构方式,对三相220V交流供电进行全桥不可控整流。逆变部分采用IPM智能功率模块,将母线直流电转化为交流电,其IPM内部集成了IGBT驱动电路,性能稳定,避免在外部搭建PWM驱动电路而造成的控制系统繁琐,缩短了PWM信号在PCB板上的走线长度,避免了周边电路带来的干扰。在由DSP发出的SVPWM信号采用光耦隔离后由系统提供的驱动DC15V电源直接驱动IPM。根据系统功率要求,考虑了系统的布局和干扰条件,本设计采用了Agilentg公司生产的光耦HCPL3120,具有500ns的开关时间和15KV的绝缘耐压等优良特点,在IGBT驱动中具有广泛的应用,其性能满足系统的要求。
2.2 控制电源电路
一般情况下,控制电源单独工作时,其输出电压纹波大小均可以满足控制系统要求,但控制电源带上负载后,在电源输出电压上会叠加上较高的纹波电压,如输出纹波太大,会影响到控制电路和检测电路工作的可靠性。因此,合理配置和设计稳定的开关电源对整个系统的实现至关重要。针对控制电源稳定性的需求,本设计采用了PI公司生产的三端离线PWM复合开关TOPSwitch以及光耦和基准源组成的反激式开关电源,输入额定电压为220V,经过反馈及钳位电路分别得到5V,-5V及15V的控制电源。采用5V电源为控制基准反馈回路。
2.3 转子位置、角速度检测电路
电机转子外侧安装有位置传感器,通常选用正交式光电编码器。其利用光电元件制作的精密光栅器件检测光学信号,在经过换算和信号处理输出具有ABI三种信号的正交编码信号。输出的信号能够直接连接到DSP的码盘检测接口,DSP通过内置的接口采集到高速的盘脉冲信号进行处理,用于完成矢量控制和位置环的伺服控制。
2.4 电流检测电路
矢量控制依赖于准确的电流采样信号,其信号的波动干扰都会直接造成系统控制偏差和控制性能下降,直接影响整个电流环的控制以及系统的稳定。因此我们需要选用的霍尔电流传感器应该满足高采样精度和低温漂的要求。本设计选用了ALLegro公司生产的ACS712ELC系列的电流传感器。该传感器具有2.1 kVRMS电压绝缘及低电阻电流导体的全集成、极稳定的输出偏置电压和近零的磁滞。同时在DSP中的12位转换器模块提供了高效的采集频率对电流信号进行采集和反馈控制,可以满足对系統的控制精度和稳定性的要求。
3 实验平台软件设计
DSP作为系统软件算法实现的载体,软件实现的功能主要有:矢量控制算法、PID调节器算法、伺服驱动的电流环、速度环、位置环算法的实现,模糊控制器算法实现。本设计伺服电机数字控制系统软件采用模块化设计。
3.1 系统模块
系统模块是系统初始化的过程。主要包括两个模块:系统初始化和中断配置。系统初始化主要包括:配置系统时钟、IO接口初始化、通讯模块的初始化、模拟量接口的初始化、在ROM中设置用户参数与电机参数的配置。
3.2 电机控制模块
电机控制模块主要由DSP完成。其主要包括两个部分:矢量控制模块和SVPWM产生模块。矢量控制算法是永磁同步电机伺服驱动控制的基础,算法的实现需要实时对电流信号解耦运算,每个控制周期都有需要运算的程序,因此可以利用DSP对数字信号的高速处理的能力来解决大量运算的工作。
3.3 外部接口模块
外部接口模块实现对DSP内部控制算法和片外系统的信息交互接口。有控制算法需要的实时电机电流和码盘位置信号和用于存储信息的ROM之间的SCI通讯装置接口。控制器运行状态信息的反馈,包括通过IO接口采集进入DSP内部的数字量信号和驱动器散热系统温度信号的处理。
3.4 通讯模块
通讯模块是实现上位机和驱动器控制本身信息交互的功能。DSP集成了CAN2.0B的标准通讯协议,供用户在此物理层的基础上进行应用层协议的开发。应用该协议上位机能够实现对一台或多台驱动器组成主从结构的网络控制,其传输速度能满足上位机对系统及网络控制的实时性要求。
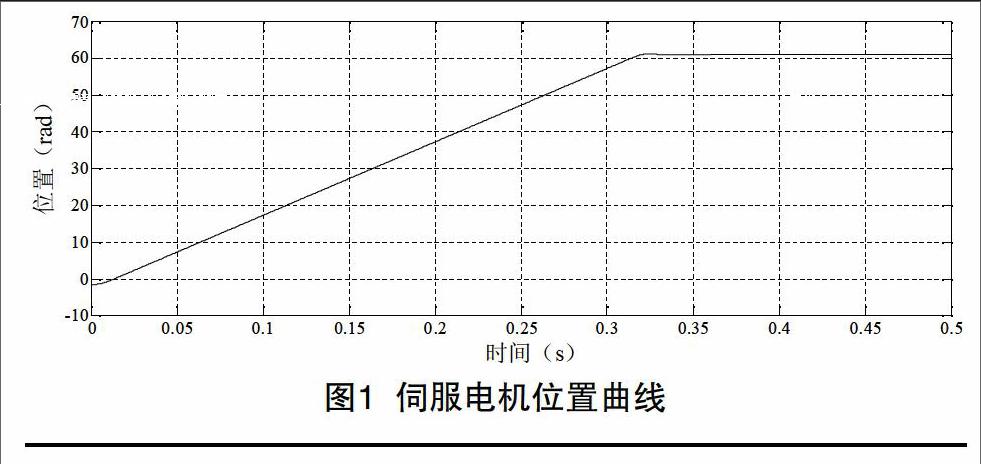
4 实验验证
矢量控制系统是一个复杂的闭环控制系统,其中包含有速度和电流两个闭环结构,有多个PI调节器需要进行参数整合,因此一次性将整个系统搭建并调试的方案不具有可行性。电流环的参数主要取决于电机的电气特性,因此要先进行电流环参数调整,当电流环稳定后在进行速度环和位置环调试。系统实验位置曲线如图1所示。
5 结语
本文通过分析交流永磁同步电机驱动控制系统硬件、软件相关模块的设计,构建了交流永磁同步电机伺服驱动控制系统。采用分级调试思想,调试了系统开环、电流环以及速度环,验证了电机驱动系统的电流环与速度环驱动控制可行性;最后在实际作业环境下测试了位置环,验证了模糊算法并给出了相关调试曲线,说明模糊自适应PID在位置环中的应用具有改善控制性能的作用,且驱动系统满足系统控制精度要求。
参考文献
[1]霍中良,王兴松.基于模糊PID的伺服压力机位置控制系统[J].锻压技术,2011,36(5):93-96.
[2]DQ Truong, KK Ahn. Force control for press machines using an online smart tuning fuzzy PID based on a robust extended Kalman filter[J].Expert Systems with Applications, 2011,38(5):5879—5894.
[3]夏乃钦,彭继慎,刘鉴.基于IPM的永磁同步电机伺服驱动控制的研究[J].微计算机信息,2011,27(05):50-53.
