基于小波理论的电传飞机飞控系统试飞数据预处理
2017-03-31李伟
李 伟
(中国商飞试飞中心,上海 200232)
基于小波理论的电传飞机飞控系统试飞数据预处理
李 伟
(中国商飞试飞中心,上海 200232)
随着科技的不断发展,电传控制已成为民用客机的标配。为验证电传飞机满足适航条款及航行运营需要,民用飞机申请人需采用不同的验证手段,其中,试飞是非常重要的验证手段之一。飞行控制系统作为飞机的重要子系统,其试飞主要验证飞行控制系统的功能及性能等。而试飞数据作为验证适航条款的依据,经常受到噪声污染。同时,试飞时还会受到气流等干扰因素影响,严重影响飞控系统的性能验证。基于小波理论,消除了试飞数据中的噪声。试验结果表明,经数据处理后的试飞数据完美验证了飞行控制系统的性能。
电传控制,小波降噪,试飞
电传控制系统是以多功能计算机为中心,由传感器、阻尼器、液压或电动作动器等通过电缆或光缆组成,并通过控制舵面对飞机飞行姿态实施控制的一套系统[1]。1984年,欧洲空中客车公司率先研制出了真正意义上的电传飞机A320,标志着民用飞机进入了电传控制的新时代,随后,以A340、A350、A380、SSJ-100、CRJ系列、B777、B787、ERJ为代表的一大批先进民用电传控制飞机不断涌现[2]。目前,电传给型控制系统已成为现代主流民用飞机的标配,尤其是随着科技的迅速发展,数字电传开始逐步代替模拟电传,并成为评价民用飞机先进性的重要指标。
飞机的设计、制造,以及试飞是飞机研制的三大支柱。其中,试飞是备受关注的一个环节。现代飞机的试飞周期占型号验证周期的一半以上。飞行控制系统试飞主要验证飞行控制系统的功能及性能是否满足系统设计需求及适航条款,其主要依据就是飞行试验获得的试飞数据,其中,性能试验对试飞数据的要求更高。民用电传客机的主要性能指标包括舵面的极限偏度、舵面的启动阈值、舵面的延迟时间等。
虽然飞行试验是验证飞行控制系统最可靠的方法,但是飞行试验中受到的干扰因素很多,很容易产生噪声数据。噪声数据的产生,会影响飞行控制性能指标的验证,尤其是对于小幅值的指标。例如,某民用飞机飞行控制舵面的启动阈值幅值一般小于0.5º,如果噪声数据幅值大于0.1º,就会严重影响飞行控制性能验证。同时,根据民用电传飞机控制律,当飞机受到气流扰动后,飞机控制律会产生相应的操纵指令,控制飞机系统舵面偏转,进而实现飞机的平稳飞行。在试飞时,可以避免气流较大的试飞空域,但是较小的气流扰动难以避免。若为了避免较小的气流扰动重复试飞动作,就会增加额外试飞成本。因此,对试飞数据中的干扰源及信号源进行分离,具有很高的现实及经济意义。
对于数据的噪声剔除及信号源分离,国内外很多学者开展了大量研究,也取得了很多成果[3~6],但在民用飞机试飞领域,由于国内民用飞机试飞起步较晚,目前在此方面的研究成果较少。本文主要采用小波理论开展噪声剔除、独立数据源的分离,以对电传飞机飞行控制系统试飞数据进行分析、研究。
1 噪声剔除
由于试飞环境的特殊性,试飞中会受到各种外部干扰因素的影响,导致试飞数据中含有大量噪声信号,影响试飞数据验证。根据某民用飞机的试飞数据,飞行控制系统主要参数的采集频率为32Hz,经分析,其噪声源主要为高频信号,因此,本文采用小波分析法进行试飞数据噪声的剔除。
小波转换(Wavelet Transform)是指用有限长及衰减速度较快的振荡信号(母小波)来代替原始数据[3]。小波变换是将时间及频率相结合的时频分析方法,经小波变换后可以得到不同频率范围的信号,对含有工频噪声的原始信号进行小波变换,可以实现信号的噪声剔除。
门限法降噪是基于小波变换的一种多分辨率分析方法。带有噪声的原始信号经过小波变换可以实现多分辨率的逐级分解,随着小波变换尺度的增加,噪声信号的幅值逐渐降低,而需要重点关注的信号则会越来越占据主导地位。因此,通过确定合适的门限值,可以实现信号去噪的目的。小波变换的主要步骤有:选择合适的小波基、选择合适的分解尺寸、阈值确定、阈值函数选取、确定小波基分解系数及小波重构。不同的小波基具有不同的特征,如表1所示。
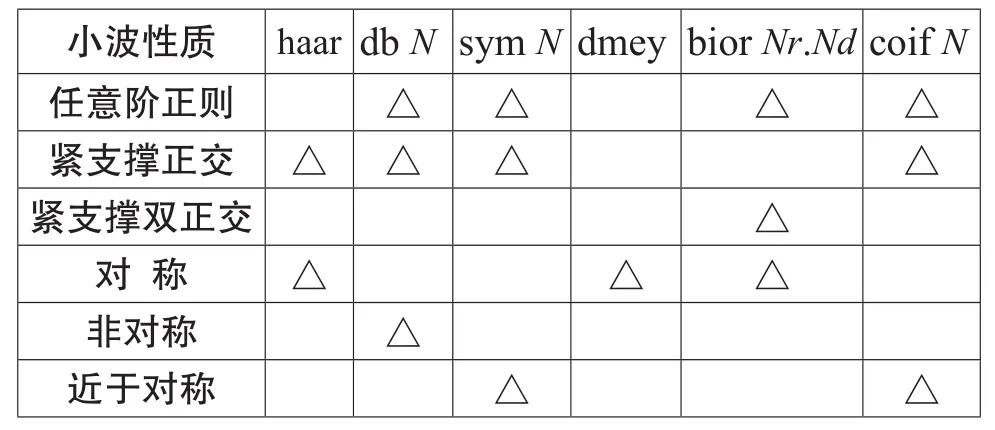
表1 6种小波基的特征
由飞行控制系统信号噪声的特征可知,小波基必须具备3个特征:正则性、正交及对称。由表1可知,满足此3个特征要求的小波基有sym N、bior Nr.Nd,以及coif N。电传飞机飞行控制系统的采样频率一般为32Hz,根据小波分解特点,选择sym N小波基对其进行分解,对比分析某电传飞机飞行控制系统的参数需求,对其进行5层分解,如图1所示。
目前,阈值确定主要有两类方法,一类是常规法,一类是自适应法,其中:
常规法:
自适应法:
其中,N为实验数据数目,σ为数据方差,j为参数,wj,k为尺度水平j的第k点的小波系数。
对飞行控制系统的噪声信号进行小波分解,其结果如图2所示。
目前,对于噪声处理,一般选用自适应法。采集一组侧杆的试飞数据进行噪声剔除,其结果如图3所示。
由上图可知,试飞数据中的高频噪声信号基本已被过滤掉,达到了降噪目的。
2 飞行控制系统性能校核
为了验证噪声剔除,以及数据源分离算法的效率,选择飞行控制系统研发试飞数据进行飞行控制系统性能指标计算,并对比分析数据处理前后性能指标的差异。以某民用电传飞机的飞行控制系统为例,研发试飞阶段主要验证的飞行控制系统性能包括杆到舵面的增益、飞行控制系统舵面的响应延迟时间等。
2.1 舵面的响应延迟时间
采集一组副翼舵面的控制指令及其实际位置,计算延迟时间,如图4所示。
图4(a)为未经过数据处理的结果,图4(b)为经过数据处理后的结果。图中相同偏度的舵面指令位置与舵面实际偏度对应的时间差(t1与t2对应的时间差)即为舵面延迟时间,可以采用以下公式计算舵面的延迟时间:
其中,Td为舵面指令的延迟时间;m为所选取的试飞数据点的数量。
由图4可知,虽然图4(a)也可以计算出舵面的响应延迟时间,但是舵面与拟合曲线的误差较大,曲线平滑度不好,即公式中的t2,i-t1,i的误差变大;而图4(b)中的试飞数据,其曲线平滑度较好,相应的拟合曲线的误差较小。选取50组经过数据处理及未经过处理的试飞数据进行对比分析,未经数据处理的试飞数据计算结果为:Td,m1=0.147s(均值),Td,std1=0.0483(均方差);经数据处理后的结果为Td,m1=0.142s,Td,std1=0.0045。
2.2 杆到舵面的增益
对于杆到舵面的增益,与飞行控制系统的模式有关。某民用电传飞机共有3种模式,不同模式下杆到舵面的增益不同。正常情况下,杆到舵面的增益不是固定值,随襟缝翼构型、飞机空速等改变。但丧失这些信号后,增益可能仅随襟缝翼构型改变,其增益为固定值。本文以增益仅随襟缝翼构型变化为例,其计算公式如下:
其中,Gd为杆到舵面增益,δi为舵面实际偏度,δssu为经整形后的杆的控制指令。
由前文可知,杆的控制指令容易受到气流等因素引起的控制指令干扰。采集50组侧杆指令及升降舵偏度,计算不经过数据处理及经过数据处理后的增益,并与设计的理论值进行比较,如图5所示。
该飞机整形后侧杆俯仰控制指令与升降舵增益理论值为0.683,未经过数据处理及经过数据处理后的增益值的均值分别为0.6728及0.6798。由t检测结果可知,未经数据处理的增益与理论增益相比,其结果偏小,具有统计学意义上的差异(t1=7.518,P1=0.000<0.05)。而经数据处理后的增益与理论增益相比,其结果不存在统计学意义上的差异
3 结束语
针对民用电传飞机试飞数据,采用小波降噪进行了预处理。试验结果表明,经预处理后的试飞数据消除了噪声的污染,降低了外部因素对试飞数据的影响。通过对飞行控制系统相关性能指标的计算,利用未进行处理的试飞数据计算获得的飞行控制系统指标,部分指标不满足飞控系统设计要求,需要进行后续试飞结果分析;而基于预处理后的试飞数据计算获得的飞行控制系统性能指标满足设计要求,减少了后续工作量,提高了试飞效率,降低了试飞成本。
1 张亮, 葛志浩, 董新民. 基于MATLAB的电传控制系统仿真与分析[J]. 电光与控制, 2005, 12(5)∶ 54~57
2 杨菊平, 陈益. 民用飞机飞控计算机的现状与展望[J]. 航空计算计算, 2007, 37(5)∶ 131~134
3 Starck J L, Siebenmorgen R, Gredel R. Spectral analysis using the wavelet transform[J]. The Astrophysical Journal, 1997, 482 (2)∶ 1011~1020
4 Comon P, Jutten C. Handbook of blind source separation∶ Independent component analysis and applications[M]. Academic Press, 2010
5 吕永乐, 郎荣玲. 基于奇异值分解的飞行数据降噪方法[J].计算机工程, 2010, 36(3)∶ 260~262
6 王帮峰, 林剑祥, 芦吉云. 基于EEMD—HT的飞行数据小突变信号检测[J]. 振动、测试与诊断, 2013, 33(3)∶388~392
7 Hyvärinen A, Hurri J, Hoyer P O. Independent component analysis[J]. Natural Image Statistics, 2009∶ 151~175
Preprocessing of Flight Test Data for Flight Control System of Fly-bywire Airplane Based on Wavelet Theory
Li Wei
(COMAC Flight Test Center, Shanghai 200232)
Fly-by-wire control system has been recognized as the standard configuration of commercial airplane. As a regulation of CCAR, the designer of airplane should demonstrate that the airplane is in accord with the airworthiness of CCAR using different methods. Flight test is one of the most efficient methods for the demonstration of airworthiness. Flight test of the flight control system (FCS), which is one of the most important systems for airplane, is usually used to demonstrate the function and performance of FCS. However, flight test data is usually influenced by the noise and other factors (i.e., the turbulence), which will dramatically reduce the efficiency of flight test. The wavelet theory is introduced to eliminate the noise, and the results have shown that the proposed algorithm can demonstrated the performances of FCS efficiently.
Fly-by-wire, Wavelet, Flight test
1009-8119(2017)01(1)-0057-03
