基于计算机视觉的运动目标跟踪算法研究
2017-03-23郑颖,周影
郑 颖, 周 影
(淮北师范大学 计算机科学与技术学院,安徽 淮北 235000)
基于计算机视觉的运动目标跟踪算法研究
郑 颖, 周 影
(淮北师范大学 计算机科学与技术学院,安徽 淮北 235000)
随着计算机技术的飞速发展,视频图像处理技术得到了显著的提高.本文提出了一种基于计算机视觉的运动目标跟踪方法.在Marr的计算理论框架下,我们引入通过自下而上的视觉跟踪处理方法来进行运动目标跟踪,本文以车辆视频为例,选用Robert算子对车辆进行边缘检测,针对车辆在运动过程中大小和姿态变化的情况,提出了基于多关联模板匹配方法进行跟踪.实验表明本文的算法分离的精度增强,跟踪效果好,并且能很好地满足实时性.
机器视觉;分割算法;跟踪算法;分割的准确性
1 引言
“智慧城市”是目前国内最前沿、最热门的研究课题之一,而智能交通是构建智慧城市的关键因素.现在各地均遇到了交通拥堵问题,由于不断增加的车辆和相对不足的公路通行能力,致使我国公路交通事故不断增加、交通拥堵日益严重,因此智能交通系统已引起越来越多的重视.本文以道路交通视频图像序列为研究对象,对视频跟踪方法中的关键技术进行了深入的研究,有利于更好的开发智能交通系统.
文献[1]中针对运动目标跟踪算法的应用,改进了LBP算子,经过对LBP的二进制位串的01跳变情况进行统计,合并了出现概率较低的模式,从而大大降低LBP纹理类型,使后续使用LBP纹理的运动目标检测与跟踪算法在特征匹配时速度得到提高.文献[2]中改进的跟踪算法是基于传统的Kalman滤波和Mean-Shift优化框架,算法融合了色度直方图和梯度方向直方图,以解决运动目标的旋转和形变,构建了运动目标图像区域的综合直方图金字塔,以实现多尺度的目标跟踪,采用Kalman滤波预测耦合Mean-Shift算法,在尺度、位移空间内进行优化匹配搜索,确定最佳候选目标区域的位置信息.文献[3]提出了改进的Camshift算法,在HSV颜色空间采用背景加权三维直方图建立目标模型,将输入图像转化为颜色概率分布图,然后根据目标的运动强弱自适应地结合颜色概率分布特征图与目标的运动差分图像,有效地克服了背景中的颜色干扰.文献 [4]提出了基于Kalman滤波的Camshift跟踪算法和基于SURF的Camshift跟踪算法,当目标运动速度快时,在Camshift跟踪的基础上加入Kalman滤波,对目标的质心位置进行预测估计,当目标颜色与背景颜色相近时,引入SURF算法对前后两帧的运动目标进行特征点匹配,重新确定目标位置,从而实现准确持续的跟踪.
本文在Marr的计算理论框架下,在采用自底向上的视觉跟踪的处理方法的基础上,借鉴前人的一些研究.并以车辆视频为例,针对车辆目标分割问题,通过Robert边缘检测算子得到车辆的边缘特征.结合灰度车辆图像的边缘检测,获得最大类间方差,提高分割的准确性和实时性.在相对复杂的背景下,采用模板匹配的方法对车辆进行跟踪研究,从而有利于更好的提取交通参数.
2 视觉计算的理论框架
计算机视觉的理论框架影响着计算机视觉领域的发展,是计算机视觉领域的一个指导思想.Marr视觉理论是结合物理学、神经生理学和图像处理总结的一种信息处理领域的观点.在此理论框架下,视觉图像的生成被分为三个阶段:
(1)二维简图:初始简图用边缘段、线、斑点和端点描述图像中亮度的变化,然后利用虚拟线来完全而明确的表示几何关系,最后得到描述层次可以覆盖某一尺度范围的初始简图.
(2)2.5维简图:通过对初始简图进行一系列处理运算,推导出一个能反映可见表面几何特征的表象,其中包括表面朝向,观察者距离,以及朝向和距离的不连续性,表面的反射情况,以及对主要照明情况的某种粗略的描述.
(3)三维模型:实现对观察对象的三维结构在以物体为中心的坐标系中的表象和对物体表面性质进行一些描述,从而得到图像的空间结构.
对于视觉跟踪问题,主要有两种思路.一种是自底向上的方法,另一种是自上而下的方法.本文采用自底向上的方法,结合视觉计算理论Marr视觉过程本文的方法可以划分为三个阶段:层视觉、中间层视觉和高层视觉.低层视觉到中间层视觉是图像特征描述,中间层视觉到高层视觉是2.5维描述,高层视觉往上是3维描述.
自底向上的跟踪过程显然是获得场景的位置,速度和加速度.因此,首先我们需要检测运动目标,然后确定该目标是否为跟踪目标.最后获得目标位置、轨迹等信息.我们现在要以移动车辆作为跟踪目标,在Marr的理论的帮助下视觉跟踪框架很容易实现.主要有以下三个阶段:车辆的检测属于早期阶段;目标的提取和识别,判断是否跟踪处于中间阶段;获取目标位置、轨迹等信息是后期阶段.
3 运动目标分割算法性能分析
图像分割方法是计算机运动目标跟踪中的重要方法.针对车辆跟踪问题,利用Robert边缘检测算子检测目标车辆的边缘,大大提高了分割精度.此外,我们还提出了一种最大类间方差的车辆目标分割策略,实验结果表明算法具有良好的分割效果.
Otsu方法是基于判别分析和最小二乘法原理提出的最大类间方差法,是一种阈值分割方法.在该方法中,将像素阈值分为两部分,目标C0和背景C1,然后得到类间方差:
假设某一范围的图像灰度值为{0,1,…,l-1},像素ni的灰度级i,整个像素表示为灰度级i出现的概率为

选择阈值t来区分目标和背景区域,C0={0,1,…,t};C1= {t+1,t+2,…,l-1};目标C0and背景C1可能出现的概率为

均值为

图像的平均灰度级为:

通过公式(2)(3)和(4),计算类间方差为

接着,我们定义类内方差为

总方差定义为:
针对二阶统计量OW2(t),并且OT2独立于t,我们做了简单的判断

在这样的准则下,两种类型的t值都属于最优阈值,所以η(t)为最大准则.

4 目标跟踪算法性能分析
在许多视觉跟踪算法中,基本可分为两类:一类是基于运动的算法,另一类是基于特定模型的算法.本文主要是基于模型的跟踪方法,通过相互匹配实现跟踪.模板匹配可以分为基于目标和目标区域的两种类型.基于目标的是通过角、颜色等来匹配,在复杂环境下,其匹配效果优于边界匹配法.实际上,由于目标自身的运动,对于无法长期稳定的固定目标模型,需要实时更新目标特征,以适应目标的变化.如果当前一帧的目标模型不能准确地描述当前的目标,这将导致错误的模型更新,为了解决这个问题,我们提出了一种基于多关联模板的图像匹配跟踪算法,算法流程如图1所示:
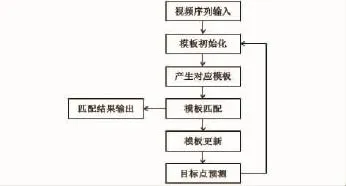
图1 跟踪算法流程图
在目标跟踪问题中,目标跟踪信息由图像相对于原始图像的匹配来确定,实际上参与图像匹配的模板与潜在匹配因子存在一定程度的差异.因此,在未知的图像上检测到的匹配对象是一个复杂的任务.模板T和潜在匹配对象p之间的关系如下所示:

其中,(x,y)∈T,(x',y')∈p,βij,αi是一个常量.结合相似性度量准则、平均绝对差分法和均方误差法,得到了平均绝对误差相似性测度:

其中,参考图像f1(x,y)的大小为m×n,实时图像f2(x,y)大小也为m×n,均方误差相似性度量可以表示为

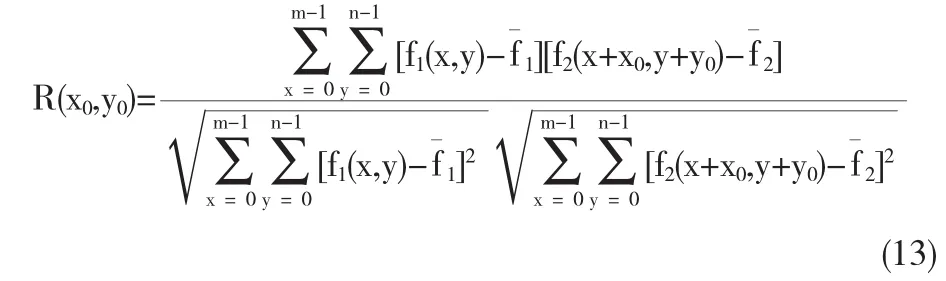
在公式(11)和(12)中,满足D(x0,y0)的偏移量(x0,y0)称为匹配点,但是当目标严重被照明影响,跟踪效果将不是非常理想的.图像的线性变化可以通过归一化算法来跟踪.归一化算法的相似性度量可以表示为
5 算法实现及结果分析
为了验证本算法的准确性,实验选用PC机配置为Intel Core I5,2GB内存,并分别在两段视频下进行了实验.跟踪结果如图4、5所示.

图4 跟踪实验结果:红车跟踪效果
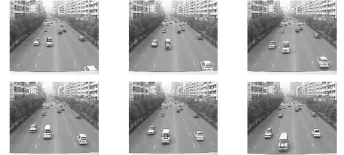
图5 跟踪实验结果:白车跟踪效果
从实验对比可以看出Camshift方法对运动目标和背景颜色相差很大的跟踪效果比较好,如果运动目标和背景颜色相似,其跟踪就会失败,甚至会造成目标丢失.本文所提出的车辆跟踪方法相对于Kalman Filter方法省时,相对于Camshift方法有所费时.但整体来看本文的方法相对于两种传统的方法漂移误差都比较小,跟踪准确性好,耗时有所减少,跟踪实时性有所增强.
5 结论
在Marr的理论的帮助下,我们研究了基于计算机视觉的目标跟踪算法,这大大有助于图像处理技术的进步和对车辆的跟踪问题的一种新的计算方法的建立.针对车辆目标分割问题,通过Robert边缘检测算子得到车辆的边缘特征.结合灰度车辆图像的边缘检测,获得最大类间方差,提高分割的准确性和实时性.在相对复杂的背景下,采用模板匹配的方法对车辆进行跟踪研究,从而有利于更好的提取交通参数.
〔1〕袁国武.智能视频监控中的运动目标检测和跟踪算法研究[D].云南大学,2012.
〔2〕刘雪.基于图像序列的运动目标检测与跟踪算法研究[D].山东大学,2013.
〔3〕孟祥怡.运动目标的跟踪与识别算法研究[D].吉林大学, 2014.
〔4〕G.Tian,R.M.Hu,and Z.Y.Wang,A method of shift Mean shift target tracking based on motion vector analysis.[J].Journal of Image and Graphics,2010,01:85-90.
〔5〕H.P.Yin,Y.Liang,J.J.Kuang,and X.Y.Yang,A method of moving object tracking based on multi feature adaptive fusion.[J].Photoelectron,Laser,2010,06:917-923.
〔6〕T.Gao,Z.G.Liu,and J.Liu,A method of multi moving target tracking based on traffic video sequences.[J].Journal of Central South University(natural science edition),2010,03:1028-1036.
〔7〕H.Y.Li,Z.Mao,J.J.Yuan,J.S.Qu,and Z.R.Wu,A method of moving target tracking based on algorithm fusion.[J].Foreign Electronic Measurement Technology,2013,12:36-40.
〔8〕Zampoglou M,Papadimitriou T,DiamantarasK I.Support Vector Machines Content-Based Video Retrieval based solely on Motion Information[A].2012 IEEE Workshop on Machine Learning for Signal Processing[C].2010.1551~2541.
〔9〕Amin M A,Hong Y.Sign Language Finger Alphabet Recognition from Gabor-PCA Representation of Hand Gestures[A].2007 International Conference on Machine Learning and Cybernetics[C].2009.2218~2223.
TP391.4
A
1673-260X(2017)02-0012-03
2016-11-19
安徽省高校自然科学研究一般项目《基于Hadoop大数据平台的短时交通流预测方法研究》(KJ2017B014);淮北市2015科技攻关计划项目《交通违章检测系统的研究与开发》(2015005)
