基于单阈值的开关磁阻电机无位置传感器技术*
2017-03-14罗德荣李亚雄李孟秋冯垚径
罗德荣,李亚雄,李孟秋,冯垚径
(湖南大学 电气与信息工程学院,湖南 长沙 410082)
基于单阈值的开关磁阻电机无位置传感器技术*
罗德荣,李亚雄†,李孟秋,冯垚径
(湖南大学 电气与信息工程学院,湖南 长沙 410082)
针对位置传感器对开关磁阻电机(Switch Reluctance Motor,SRM)应用范围的限制,研究了一种基于单阈值脉冲注入法的开关磁阻电机无位置传感器控制策略.以三相6/4结构电机为例,讨论在母线电压变化情况下向某一非导通相注入脉冲,通过均值采样方法计算脉冲电流峰值,与预设电流阈值比较实现位置估算.根据相邻阈值的时间间隔计算出电机转速,进一步获得其他相位置信息,并分析了估算位置与实际位置偏差的产生原因.该方法不但降低了脉冲注入带来的负转矩影响,还可实现角度控制,便于电机运行状态的优化.运用所述方法搭建了SRM无位置传感器调速系统的仿真模型,并通过试验证明了其正确性和可行性.
开关磁阻电机;无位置传感器;脉冲注入;均值采样
开关磁阻电机(SRM)是一种新型机电一体化的调速电机,采用双凸极结构,定子上绕有集中绕组,转子上无永磁材料和绕组,因而具备结构简单、坚固,启动转矩大,调速范围宽,运行效率高等优点[1].传统光电式、电磁式以及磁敏式等位置传感器引入增加了系统成本并降低了系统可靠性[2],限制了SRM应用范围.因此,无位置传感器技术的研究成为该领域很有潜力的研究方向.
SRM无位置控制方法有很多[3-4],主要是利用传感器采集的信号计算电感、磁链等一系列参数进行电机转子位置识别.就SRM低速运行而言, 目前主要研究位置检测方法有相电流波形法和高频脉冲注入法.在相电流波形法中,反映转子位置信息的增量电感可以通过相绕组电流的变化率获得[5].在此基础上,文献[6-8]分析了运动反电势对转子位置检测的影响,同时该方法中电感模型是位置的单值函数,未考虑相绕组饱和情况下电流变化率对转子位置精度的影响.脉冲注入法最早由剑桥大学的Harris和Lang[9]提出.通过在非导通相中注入高频电压脉冲,检测响应电流计算相电感,结合电感与位置的关系从而获得转子的位置.由于高频脉冲电压时间很短,开关周期中等效平均电压很小,从而非导通相中响应电流很小.在该方法上,文献[10]提出了SRM正常运行时向非导通相注入脉冲,判断响应电流之间的大小决定换向时刻,该方法可以实现轮流换向,但换相位置不佳,且开通角、关断角固定,导致启动电流小,产生的力矩不大.文献[11-12]提出了利用电力电子器件开通和关断时产生电流变化的斜率差来估算SRM某一时刻的电感,再进行电感模型的线性化处理得到位置信息.该方法可忽略绕组电阻压降和开关状态改变区域中反电势的影响,可实现全周期的位置估算.文献[13]提出基于双电流阈值的脉冲注入法,在两个不同阶段设置阈值分别实现电机的工作运行控制和位置检测的脉冲注入,可以灵活地实现全周期脉冲注入和开通角、关断角调整.
脉冲注入法以电流斩波控制为前提,在单相轮流导通控制中,关断某相导通另一相同时会在系统中产生耦合,固定的开通角、关断角不利于实现转矩脉动减小和系统优化.
本文在脉冲注入法的基础上,提出一种脉冲电流峰值计算方法,考虑到系统实际运用中负载突变、过载以及电动汽车运行时母线电压变化带来的峰值电流变化问题,通过讨论母线电压波动对电流阈值影响,结合电流斩波控制,实现开关频率和脉冲占空比固定情况下的电流阈值调节,并搭建了该方法的Matlab控制系统仿真模型.最后,以一台15 kW的6/4 SRM为试验对象,采用DSP28335为控制器进行试验,验证了该方法的有效性.
1 SRM无位置传感器原理
1.1 理论基础
电机磁链方程为:
ψ(i,θ)=L(i,θ)i
(1)
SRM相电压方程为:
(2)
根据式(1)(2),可得:
(3)
式中:R为SRM绕组电阻;L(i,θ)为单相电感;ψ(i,θ)为电机磁链;ωr为电机转子转速;θ为转子位置角.若对某一非导通相通入高频脉冲,电机转速不高,电流未达到饱和时,式(3)可简化为:
(4)
式中:Udc为母线电压;Δt为脉冲电压持续时间.当Udc与Δt固定,电感与电流幅值成反比关系,由于电感是关于电流与位置的函数,通过测得脉冲电流峰值,从而获得电机转子的位置.
1.2 脉冲电流峰值的检测
注入高频脉冲时,脉冲电流峰值与电机转子位置、母线电压、开关频率、脉冲占空比等有关.文献[14]提出使用模拟积分电路来完成对脉冲电流采样,使最终积分器输出为脉冲电流峰值的函数.此方法不但增加了硬件电路,而且还需考虑电流过大时产生的积分器饱和问题.在此基础上,本文提出一种均值采样方法计算脉冲电流峰值,即在脉冲周期中利用一系列采样数据计算脉冲电流峰值.图1给出了在脉冲周期中,电流分为上升时间tr,续流时间tf和恒定为零时间ti的3个阶段,可知:
Ts=tr+tf+ti=1 000/n
(5)
上升与续流阶段对称,故只需考虑上升阶段的电流值.假设采样频率为n×100 kHz,占空比为D(保证电流为零的时间,必须D<0.5),则在整个脉冲周期Ts中采样N=100次.
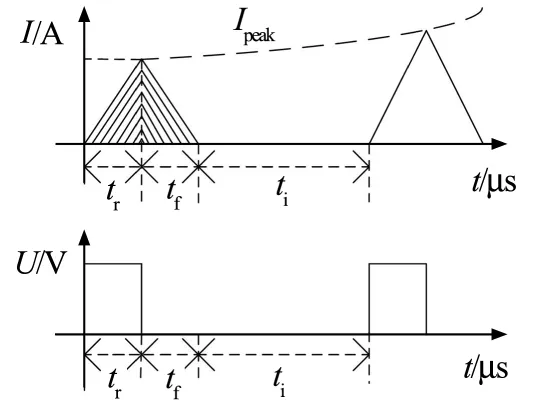
图1 单相脉冲周期电流
(6)
M=100D
(7)
同时根据等面积原理,可知电流峰值:
(8)
(9)
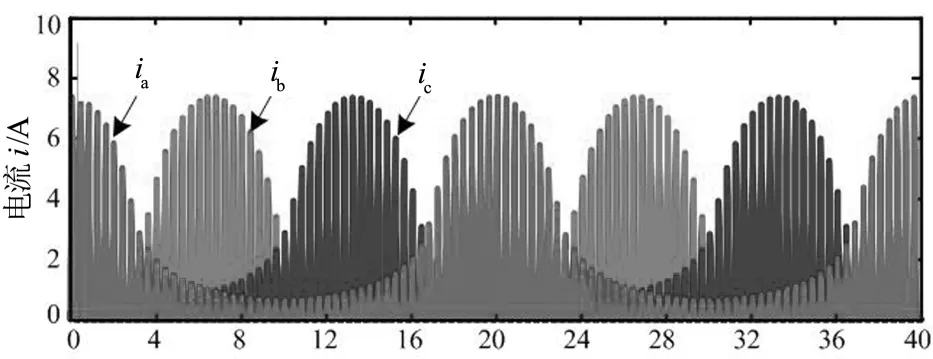
非运行状态下绕组中连续注入脉冲,得到的脉冲电流如图2(a)所示,经过上述计算得到电流峰值如图2(b)所示.本文中使用的是机械角度,电机定转子齿对齐时位置为0°,此时电感最大.

图2 脉冲电流和计算后的电流峰值波形
1.3 脉冲峰值电流阈值
根据SRM运行原理,按照三相6/4极SRM轮流导通原则,可选择45°~75°的导通区间.工作在45°导通时,绕组电感小能使电流迅速上升,保证了电流环斩波控制所需电流.工作在75°关闭时,由于绕组中存在续流情况,不能立即注入脉冲,否则会使电流迅速增加,导致脉冲电流峰值检测错误.根据图3,可适当选择非导通区域0°~45°作为SRM脉冲注入区域.
进行阈值选择时,应考虑:①选取参考位置阈值电流变化对位置估算的相对误差较小,可保证估算精度;②参考位置阈值电流不宜过小,减小与实际值之间的相对误差;③在保证测量精度情况下,参考位置阈值电流尽量不宜过大,否则会增加脉冲电流带来的负转矩影响.

位置θ/(°)
1.4 电压波动对阈值的影响
根据式(4),母线电压波动会影响脉冲电流峰值,导致位置估算误差.为了提高位置估算精度,需要讨论母线电压波动时的电流阈值Ith.脉冲电流峰值在不同电压下随位置的变化情况如图4(a)所示.为了更清楚地表述三者之间的关系,参照如图4(b)所示不同位置下随母线电压变化的峰值电流波形,由图4(b)可知,不同位置处的脉冲电流峰值与母线电压成线性关系.

转子位置θ/(°)
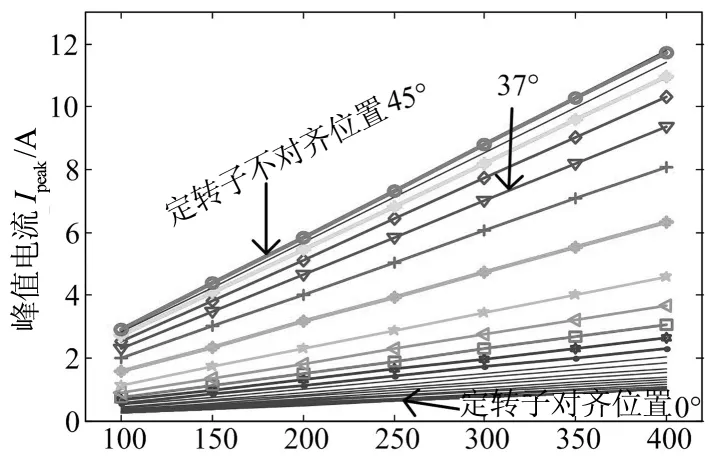
母线电压Udc/V
该线性关系可表示为:
Ith=k(θ)Udc+h(θ)
(10)
式中:k(θ)和h(θ)为随不同位置变化的系数.可根据此关系式调节电流阈值.综上所述,本文选择37°处作为位置估算点,得到k(θ)为0.023 5,h(θ)为-0.039 3.当脉冲电流峰值到达预设的阈值时,进行位置更新,实现位置估算.
1.5 转速与其他位置的估算
以电流斩波为内环的SRM调速系统,不仅需要转子位置信息,同时需要速度信息.同一相脉冲电流峰值达到预设电流阈值的间隔距离Δθ为:
Δθ=2π/Nr
(11)
式中:Nr为转子极数.在SRM运行时,可用式(12)计算SRM的转子速度ωr:
ωr=2π/NrΔT
(12)
式中:ΔT为单相注入脉冲电流峰值达到阈值的间隔时间.在实际中,考虑到电流传感器检测带来的误差需要对式(12)计算的ωr进行滤波.用式(13)进行任意位置处的估算:
θ=θt+∫ωrdt
(13)
对于三相6/4电机,转子极数Nr为4,SRM每转一圈进行4次位置更新.每次更新位置为θt,到下次电流到达阈值之前,用式(13)计算该段时间内的位置信息.即使存在一定的位置误差,也不会随着时间累积到下一次位置信息的估算,因而只要预设的电流阈值准确,可较好地实现无位置运行.若以A相为参考相注入脉冲,则B,C相位置分别延迟30°,60°,从而获得各相实时位置,可进行SRM开通角和关断角调节,使SRM运行在最佳状态.该方法比传统的脉冲注入法更加灵活,降低整个周期的脉冲注入,减小负转矩,提高了系统效率.
1.6 角度误差分析
该系统能够稳定运行的关键是脉冲电流峰值和参考电流阈值能够正确地比较大小.因此系统需要满足以下两个条件:①离线获取的参考位置点处随电压变化的脉冲电流峰值曲线要准确;②参考位置点选取恰当,在同样电流误差的情况下,该处的电感位置精度应最高.
此外,SRM转子极数和注入脉冲频率对位置估算也会带来一定误差.在同一段脉冲注入区域,脉冲注入时间会随着转速增加而减少,产生的位置误差会随之增加.当SRM运行转速为n,注入脉冲频率为fpulse时,产生的机械角度误差ΔθM为:
(14)
对于转子极数为Nr的SRM,产生的电角度误差ΔθE为:
ΔθE=ΔθM×Nr
(15)
2 无位置传感器调速系统
根据上节所述,搭建了如图5所示的SRM无位置传感器速度控制系统.该系统由速度外环和电流斩波内环构成,通过速度调节器将速度误差转化成给定电流I*来实现调速.通过开通角、关断角、转子位置、旋转方向等信息综合判断实现各相电流给定,与实际反馈电流滞环比较,产生电力电子器件控制信号.

图5 无位置传感器控制系统图
SRM运行时运用均值采样方法检测到注入脉冲电流峰值,与参考电流阈值比较获得该时刻的位置信息,从而完成位置、速度估算.同时,可灵活地调节开通角、关断角,优化电机的运行状态.
3 仿真分析
为验证理论的正确性,本文在Matlab/Simulink中进行了仿真.以一台15 kW三相6/4 SRM为研究对象,参数如表1所示,斩波频率和脉冲注入频率设置为5 kHz,采样频率为500 kHz,注入脉冲占空比为0.2,母线电压额定250 V,额定转速1 190 r/min,开通角θon为45°,关断角θoff为75°.

表1 15 kW SRM电机参数
图6中SRM由原动机拖动,转速为500 r/min,母线电压为250 V,同时注入脉冲得到的仿真电流波形.脉冲电流峰值在半个电感周期中具有单调性,确保了电流阈值估算位置的可行性.
t/ms
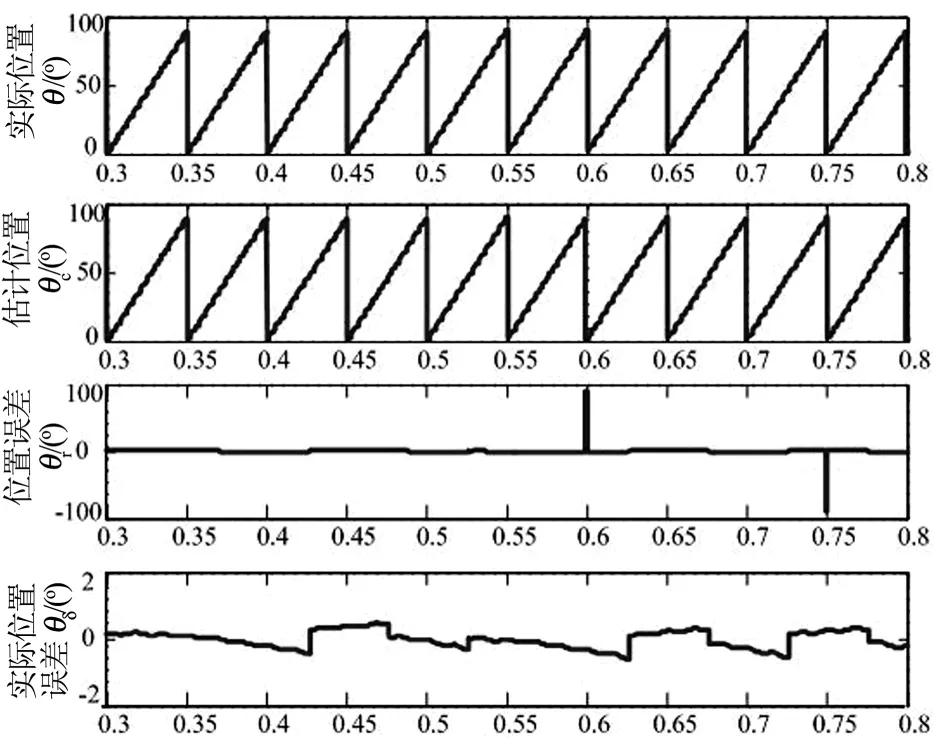
图7所示为电机在20 N·m负载,300 r/min转速,母线电压模拟正弦变化时电流仿真波形.在电机运行中只需向某一非导通相注入脉冲,可减少整个周期中脉冲的注入时间,同时减小了负力矩影响.考虑到器件开关频率的限制,SRM运行时电流滞环是在5 kHz频率下实现的,即在200 μs周期中实现一次实际值与滞环参考值的比较,与不限频率的理想滞环情况下电流相比,工作电流波动相对变化较大.根据式(9)所述脉冲电流峰值采样方法,图7所示的脉冲电流峰值Ip波形验证了所提均值采样方法的正确性,可以准确地计算出脉冲电流峰值,电流阈值能够动态地跟踪母线电压变化,实现转子位置的正确估计.根据式(14)和式(15),在5 kHz频率,300 r/min转速下,该方法所产生的机械角误差ΔθM为0.36°,对于6/4SRM来说,电角度误差ΔθE为1.44°.图8所示为该情况下转子位置仿真波形,位置误差与计算值接近,误差范围在1°内,故该算法能够准确地进行位置估算.

t/s
t/s
图9和图10所示为电机在20 N·m负载,800 r/min转速,母线电压变化时仿真波形.与300 r/min时类似,动态阈值跟踪效果良好.在5 kHz频率,800 r/min转速下,根据式(14)和式(15),系统的机械角误差ΔθM为0.96°,电角度误差ΔθE为3.84°.与300r/min相比,误差变大.随着转速的增加,该方法产生的位置误差会增加.

t/s
4 试验验证
为了进一步验证本文控制策略的可行性,试验以TI公司的TMS320F28335芯片为控制器,采用三相不对称半桥的功率变换器及驱动电路的功率系统进行试验.试验平台如图11所示,软件程序部分均在DSP中实现,无需额外的硬件资源.
t/s
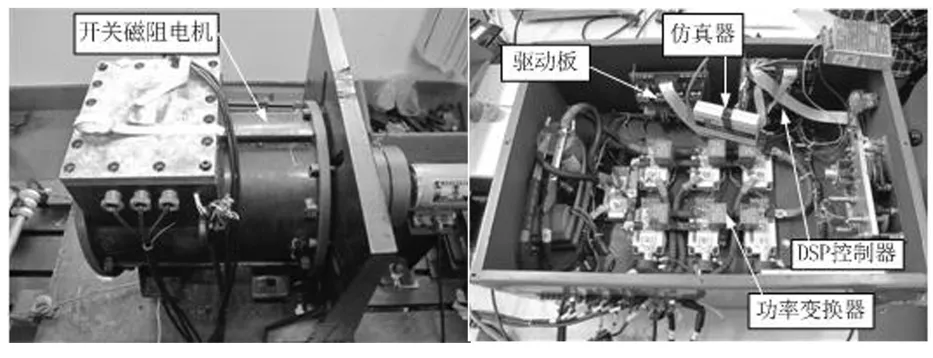
图11 试验系统硬件图
图12为一台异步电机拖动SRM以500 r/min 旋转,参数与仿真参数一致.可以看出,试验脉冲电流峰值与仿真结果一致.

t/(20 ms·格-1)
图13为电机在20 N·m负载,开通角θon=45°,关断角θoff=75°,转速分别为300 r/min和800 r/min时三相电流波形图.系统中只在A相绕组非导通区域注入脉冲,降低了位置估算次数,在一定程度上给精度带来影响,但是减少了脉冲带来的负力矩影响.由于A相绕组37°位置属于C相绕组导通范围,可选择脉冲注入的起始时刻为C相开通角到达时刻,进一步减小了非导通相中检测脉冲的注入时间.同时,在仿真模型三相半桥中相绕组上下两个IGBT同时动作的基础上,进行改进.在导通相电流斩波期间,当给出IGBT关断指令时,只关闭上桥臂的IGBT,下桥臂IGBT继续保持开通,使绕组电流经过下桥臂IGBT和二极管完成电机绕组续流过程,避免了绕组电流迅速下降,维持了一定的转矩输出.经上述调制,使导通相电流斩波期间,电流变化平稳,减少转矩脉动.波形如图13所示,比仿真电流波形较好.

t/(20 ms·格-1)
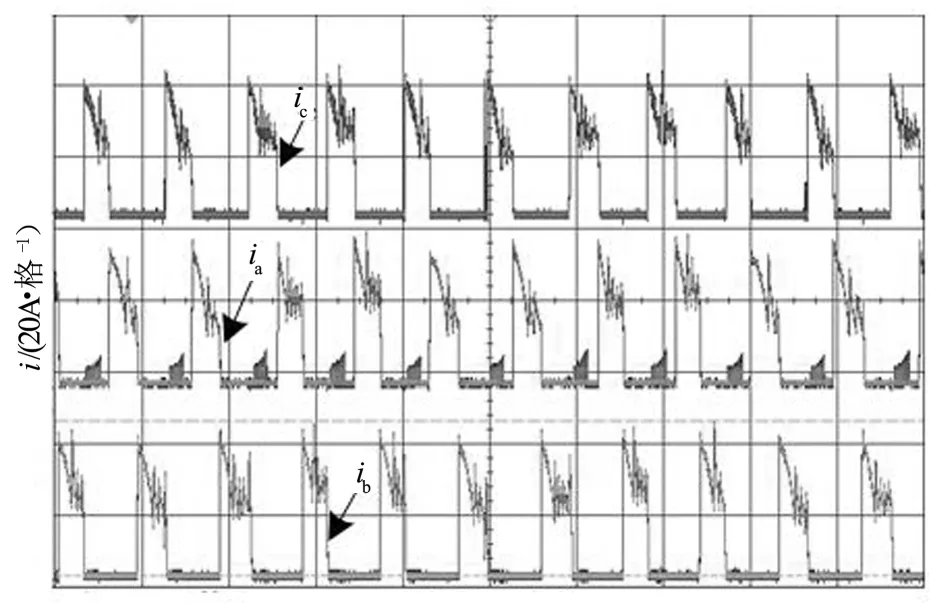
t/(20 ms·格-1)
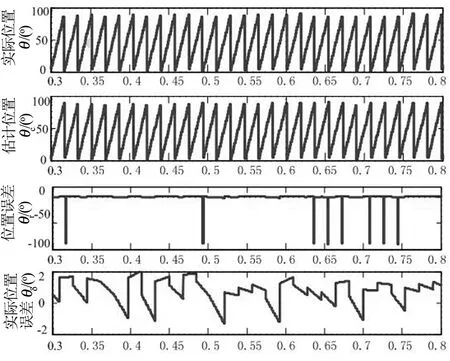
图14为电机分别在300和800 r/min时的位置波形.在试验中母线电压从250 V变到350 V,电流峰值阈值跟随母线电压变化,从而完成准确的位置估算.由图15可知,由该算法得到的估算位置与实际位置误差很小,很好地代替了位置传感器.

t/(20 ms·格-1)

t/(20 ms·格-1)

图15 电机分别在300和800 r/min时的位置偏差
5 结 论
本文运用脉冲注入法,结合均值采样方法讨论母线电压变化对脉冲电流峰值的影响,提出了一种基于脉冲注入阈值法的SRM无位置传感器技术.该方法不需要复杂运算和额外的硬件电路.仿真和试验验证了该方法在一台15 kW电机上无位置传感器下的稳定运行.由于脉冲注入法在高速时非导通相中电流续流时间变长,脉冲注入的时间变短,使该方法适用于电机中低速状态.可结合磁链法、电感模型等状态观测方法实现全速度范围内的无位置运行.
[1] 吴红星,嵇恒,倪天,等. 新型开关磁阻电机发展综述[J].微电机,2011,44(1): 78-83.
WU Hongxing , JI Heng , NI Tian,etal. Summary of novel switched reluctance motor development[J]. Micromotors,2011,44(1): 78-83.(In Chinese)
[2] PER T,HUSAIN I,ELBULUK M. Design trends and trade-offs for sensorless operation of switched reluctance motor drives[C]//IEEE Industry Application Conference, Thirtieth IAS Annual Meeting ,1995 :278-285.
[3] EHSANI M,FAHIMI B.Elimination of position sensors in switched reluctance motor drives:state of the art and future trends[J].IEEE Trans on Industry Electronics,2002,49(1):40-48.
[4] 吴红星,倪天,郭庆波,等.开关磁阻电机转子位置检测技术综述[J].微电机,2011,44(3):78-83.
WU Hongxing,NI Tian,GUO Qingbo,etal.Summary of detectingrotorpositiontechniqueforswitchedreluctancemotors[J]. Micromotors,2011,44(3):78-83.(In Chinese)
[5] ACARNLEY P P,HOOPER C W,HILL R J.Detection of rotor position in stepping and switched motors by monitoring of current waveforms[J].IEEE Transactions on Industrial Electronics,1985,32(3):215-222.
[6] PANDA S K,KALPATHI R R.Active phase coil inductance sensing:US, 5786681[P].1998-07-28.
[7] PANDA S K,AMARATUNGA G A J.Comparison of two techniques for closed loop drive of VR step motors without driect rotor position sensing[J].IEEE Transactions on Industrial Electronics,1991,38(2):95-101.
[8] PANDA S K,AMARATUNGA G A J.Analysis of the waveform detection technique for indirect rotor position sensing of switched reluctance motor drives[J].IEEE Transaction on Energy Conversion,1991,6(3):476-483.
[9] HARRIS W D,LANG J H.A simple motion estimator for variable-reluctance motors[C]//The 1988 Industry Applications Society Annual Meeting,1988:281-286.
[10]蔡骏,邓智泉. 两种开关磁阻电机无位置传感器起动技术的比较研究[J].中国电机工程学报, 2013, 33(6): 136-143.
CAI Jun, DENG Zhiquan. Comparative sudies of to kinds of sensorless starting techniques for switched reluctance motors[J]. Proceedings of the CSEE,2013,33(6):136-143.(In Chinese)
[11]蔡骏,邓智泉.基于全周期电感法的开关磁阻电机无位置传感器控制技术[J].电工技术学报,2008,23(7):33-38.
CAI Jun, DENG Zhiquan. Sensorless control of switched reluctance motors based on full-cycle inductance method[J]. Transactions of China Electrotechnical Society,2008,23(7): 33-38.(In Chinese)
[12]蔡骏,邓智泉.基于电感线性区模型的开关磁阻电机无位置传感器技术[J].中国电机工程学报, 2012, 32(15): 114-123.
CAI Jun, DENG Zhiquan. Sensorless control of switched reluctance motors based on phase inductance model in linear regions[J]. Proceedings of the CSEE,2012,32(15):114-123. (In Chinese)
[13]PASQUESOONE G,MIKAIL R,HUSAIN I. Position estimation at starting and lower speed in three-phase switched reluctance machines using pulse injection and two threshold[J]. IEEE Transactions on Industry Appl,2011,47(4):1724-1731.
[14]OFORI E,HUSAIN T,SOZER Y,etal.A pulse injection based sensorless position estimation method for a switched reluctance machine over a wide speed range[C]//Energy Conversion Congress and Exposition (ECCE), IEEE,2013:518-524.
Sensorless Technology of Switched Reluctance Motor Based on the Single Threshold
LUO Derong,LI Yaxiong†,LI Mengqiu,FENG Yaojing
(College of Electrical and Information Engineering, Hunan University,Changsha 410082,China)
This paper presented a control strategy of indirect position estimation for switched reluctance motor (SRM) based on the single threshold of pulse injection in order to reduce the application scope of the limitation due to the position sensors. Considering the case of the bus voltage change, through injecting voltage pulse into one idle phase of 6/4 motor, the pulse peak current is detected by the mean sampling method proposed in this paper. The results are then used to predict the position by means of comparing the current preset threshold. After acquiring the time interval between adjacent threshold, it is convenient to calculate the speed and to confirm other position at every time. The deviation between estimated position and actual position was also analyzed. The proposed method not only reduces the negative torque influence brought by injection pulse but also flexibly implements the angle control that optimizes the motor running state. The SRM sensorless speed control system is built in Simulink, and the DSP experiment results verify the present method.
switched reluctance motor;sensorless control; pulse injection; mean sampling
1674-2974(2017)02-0094-07
10.16339/j.cnki.hdxbzkb.2017.02.014
2016-01-08
湖南省自然科学基金资助项目(14JJ3065), Natural Science Foundation of Hunan Province of China(14JJ3065)
罗德荣(1968-),男,湖南长沙人,湖南大学教授
†通讯联系人,E-mail:lyxhd03@163.com
TM315
A
