基于声发射衰减特性的故障行星轮定位研究
2017-03-09卢文秀褚福磊
张 宇, 卢文秀, 褚福磊
(清华大学 机械工程系,北京 100084)
基于声发射衰减特性的故障行星轮定位研究
张 宇, 卢文秀, 褚福磊
(清华大学 机械工程系,北京 100084)
行星齿轮箱是风力机传动装置的重要组成部分,行星轮在低速重载、既自转又公转的复杂环境下容易诱发故障,其故障诊断特别是故障行星轮定位一直是研究重点和难点。建立了行星轮齿轮箱实验装置,模拟了行星轮故障,并利用声发射信号进行故障行星轮定位。实验研究了声发射信号在齿轮内部、齿轮与齿轮之间的传播特性,利用信号的幅值衰减特性简化了故障定位模型。利用信号幅度随信号传播距离增加而呈指数衰减的关系,建立了故障源定位方程组,从而获得故障齿的啮合位置,进一步确定故障行星轮的位置。实验结果表明:利用声发射信号的幅值衰减特性能够较为精确的确定故障行星轮的位置。
声发射;衰减特性;行星轮;定位
近年来,随着风力发电行业的迅速发展,风机的关键组成部分——行星齿轮增速箱的健康问题倍受重视。而在行星齿轮箱故障诊断这一领域中,现有的研究工作大多集中在定轴转动或相对静止的部件中,对于既自转又公转的行星轮研究相对较少[1],而恰恰在齿轮箱中行星轮的受力情况最为复杂,也是最易损坏的元件之一。在齿轮的诸多故障形式中,局部轮齿剥落故障不仅影响着齿轮箱的传动精度,而且极易造成齿轮内部的不均载[2],因而很具研究价值。此外,无论是传统的振动检测技术还是声发射检测技术,通过从信号中提取相应故障的故障特征频率依旧是诊断的主流方法,但对于行星齿轮箱而言,行星轮个数较多,仅仅诊断出行星轮存在故障有时并不能满足工业需求,因而能够对故障行星轮进行定位具有重要意义。
声发射(Acoustic Emission,AE)信号是指材料内部发生变形或破坏时而发出的弹性应力波[3]。基于对声发射信号进行研究的声发射无损检测技术因具有对构件几何形状不敏感,信号集中在高频域等特征[4]被广泛应用于具有较强机械噪声的复杂机构故障诊断中,如齿轮及轴承等重要旋转机械构件[5]。
在故障源定位方面,声发射检测技术呈现出明显的优势。例如NIRI等[6]利用6个传感器构成的传感器阵列诊断出了圆柱壳单元的故障源位置。EATON等[7]建立了基于声发射信号到达时间的方法对碳纤维层合板的故障源位置进行定位。在旋转机械系统定位方面,WANG等[8]利用布置在自转杆状结构两端的声发射传感器采集信号,并通过信号到达时间的互相关关系对杆件的磨损位置进行定位。LI等[9]利用声发射方法采集了置入故障齿轮的定轴齿轮箱不同位置的声发射信号,通过到达时间对故障齿轮位置进行估计。由此可以看出以往的声发射定位研究工作大多基于结构较为简单的静止或定轴转动构件,而且普遍采用较为复杂的基于信号到达时间的故障源定位研究方法。为了对复杂的行星轮故障进行定位研究,提高定位效率,本文从声发射波的幅值衰减角度着手,分析了齿轮箱中声发射波的传播特性,简单有效的对故障行星轮进行定位,也为其它复杂旋转机械失效部件的定位提供了参考。
1 声发射波传播特性
声发射波是一种复杂的瞬态弹性波,包含多种波形成分。不同结构中所激励出的声发射波形式也不尽相同,对于齿圈而言,虽其内部结构复杂,但在实际应用中可以将其简化为一圆环状结构。诸多被激励出的波形成分在齿轮箱内部经反射、折射、透射以及衰减的影响,各频率成分发生剧烈变化,因此从信号到达时间角度进行定位将会十分复杂。但信号随传播距离增加,其能量呈衰减趋势,而幅值能反应能量的变化,因此,利用声发射信号幅值衰减特性可以对行星轮故障进行定位。
声发射波的衰减一般有三种形式,即扩散衰减、吸收衰减及散射衰减[10]。其中吸收衰减及散射衰减一般由材料的黏滞性及本身缺陷造成,对于声发射波的衰减影响较小,为了简化模型予以忽略,即声发射波的主要衰减模式为扩散衰减。
随着弹性波传播距离的增加,声压分布发生变化,单位面积的声波能量及声压降低,即扩散衰减。声发射波振幅随传播距离呈指数衰减形式,表达式为:
p(x)=p0e-δx
(1)
式中:x为传播距离;δ为衰减系数;p0为声源处声发射波幅值。
为了衡量信号幅值的衰减,以信号峰峰值的一半作为参考准则,即:
(2)
式中:Max(s)为信号数据集s的最大值;Min(s)为信号数据集的最小值。
为了呈现出幅值衰减与信号传播距离的线性关系,便于对故障进行定位,本文引入DB值,即
DB=20lg(P2P×107)
(3)
可以推断出DB值随信号传播距离增加线性变化。
2 实验台的搭建与信号的获取
为了模拟实际风电齿轮箱,设计了如图1所示的风电齿轮箱等比缩小模型。该行星轮增速箱由一级行星齿轮增速级与两级定轴齿轮增速级构成。同时,为了保证行星轮增速箱的正常运转并模拟实际工况,增设了驱动电机、行星减速箱、以及液压加载模块。整机结构如图2所示,其中驱动电机为主动侧,行星轮减速箱与行星轮增速箱内部结构相同并对称安装。考虑到减速箱与增速箱之间通过联轴器连接,传递路径较长,故减速箱动态响应对增速箱影响较小。

图1 行星轮增速箱内部结构Fig.1 The internal structure of speed multiplier

图2 行星轮故障模拟实验台Fig.2 The test rig assenbly
实验选取行星轮增速箱的行星齿轮箱为研究对象,各齿轮均选用45号钢作为材料并淬火,保证了良好的表面硬度。实验中,行星轮故障选取定点式剥落故障,采用线切割的方式在某一轮齿表面切掉厚度为0.5 mm的薄层,如图3所示。

图3 齿轮剥落故障Fig.3 Seeded tooth chipping fault
对于行星齿轮增速箱而言,一旦各齿轮齿数及输入转速确定后,相关的各频率参数便可以计算出来。本实验中行星增速箱输出轴负载扭矩设定为500 N·m。马达控制面板转频调节范围为30~60 Hz,对应输出轴转频范围为14.65~29.85 Hz,行星轮减速箱传动比为56.33,则对应的行星增速齿轮箱的行星架输入转速为0.26~0.53 Hz,与实际风机工况相吻合。本实验中,选取驱动电机的转频为50 Hz(对应电机输出轴转频24.79 Hz),则实际行星架输入转频为0.44 Hz,各齿轮齿数及相关频率参数见表1。
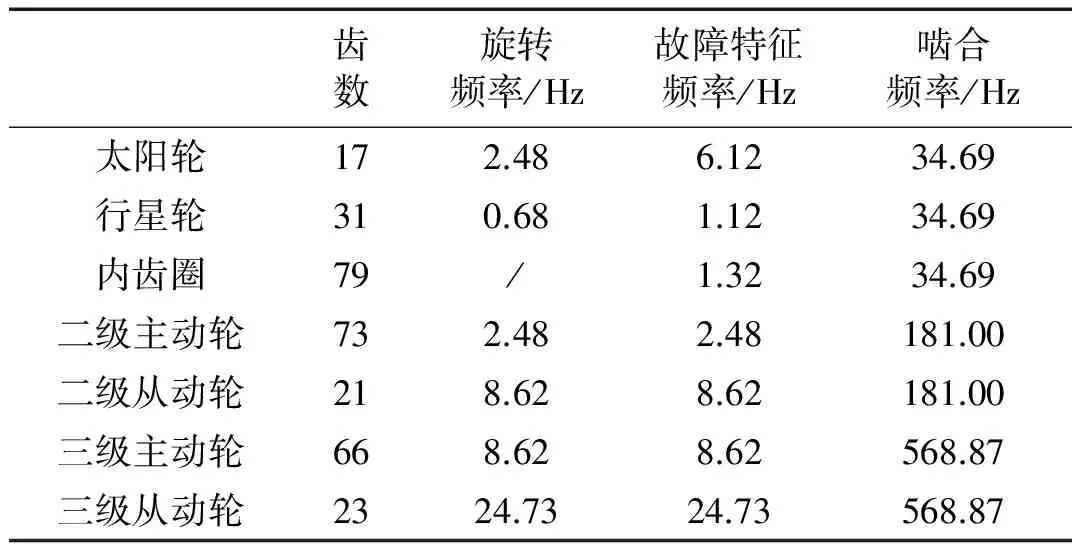
表1 齿轮箱各齿轮相关参数
信号获取方面,实验采用便携式声发射采集系统。传感器型号为R15a,其有效工作频率范围为50~200 kHz,通过40 dB增益的前置放大器与采集系统主机相连。在信号采样频率的选择方面,考虑到R15a声发射传感器的有效频率响应范围为50~200 kHz,故选择采样频率500 kHz既可以保证信号的有效频率成分不丢失也可以有效降低信号采集及处理负担。
3 行星齿轮箱的声发射传播衰减特性实验
3.1 齿轮间的传播衰减特性
为了验证声发射波的衰减形式,在定位实验之前需对声发射传播衰减特性予以研究。由于行星齿轮箱中各齿轮在啮合力的作用下相互接触,声发射波也会在各齿轮间进行传播。本实验中,采用如图4所示的传感器布置方式,传感器1、传感器2分别安装在太阳轮端面及齿圈外表面。断铅点位于图中与行星轮啮合的太阳轮轮齿处。该断铅实验中传感器1、传感器2所检测到的信号P2P值分别4.986 mV及0.05 mV,衰减近似100倍,每经过一次啮合衰减近10倍。因此,虽然行星轮故障轮齿在与太阳轮以及内齿圈啮合过程中都会激励出声发射波,但考虑到信号在齿轮间传播时幅值衰减严重且传感器仅能布置在齿圈外表面。因此在定位计算中,只需要考虑行星轮故障齿与内齿圈啮合的情况。此外,由于信号在实际传播过程中,齿轮间传播的衰减程度远大于齿轮内部传播的衰减程度,故在实际定位过程中可忽略信号在齿轮间传播的影响,仅考虑信号在齿圈中传播的情况。

图4 不同齿轮间声发射传播衰减特性断铅实验传感器布置图Fig.4 The arrangement of sensors for testing theattenuation characteristics between different gears
3.2 内齿圈的传播衰减特性
内齿圈的传播衰减特性实验中共采用4个通道的声发射传感器,布置方式如图5所示,相邻传感器间隔为60°,断铅点位于传感器1正下方轮齿表面。该断铅实验的各传感器所测得的P2P值及DB值如表2所示。从表2中可以看出随着信号传播距离的增加,1~4通道P2P值近似呈指数衰减数列,而DB值则近似为一等差数列,相邻传感器之间衰减约7 dB左右。

图5 内齿圈中声发射传播衰减特性断铅实验传感器布置图Fig.5 The arrangement of sensors for testing theattenuation characteristics in ring gear

通道1通道2通道3通道4P2P/mV7.3053.2231.3860.528DB/dB157.27150.17142.84134.45
4 行星轮故障的识别与定位
4.1 行星轮故障的识别
行星轮故障定位实验中传感器布置方案如图6。4个传感器依次标记为传感器1、传感器2、传感器3、传感器4。其中前3通道传感器用于采集齿轮箱故障信号,对行星轮故障进行定位,传感器1、2,传感器2、3之间间隔为90°,如图6(a)第4通道传感器用于提供故障行星轮理论位置,对比诊断结果,安装在如图6(b)所示的可升降平台上,图中螺钉延长线经过行星架几何中心,每当行星架旋转时螺钉周期性地触动传感器下方的铜片,因此行星架的转速被记录下来。实验中,行星架的旋转方向为图6(c)中逆时针,该图中箭头代表螺钉的矢量位置,由于该矢量经过故障行星轮几何中心,因此每当故障齿与齿圈啮合时,螺钉矢量始终指向故障点(图中实心圆点位置)。
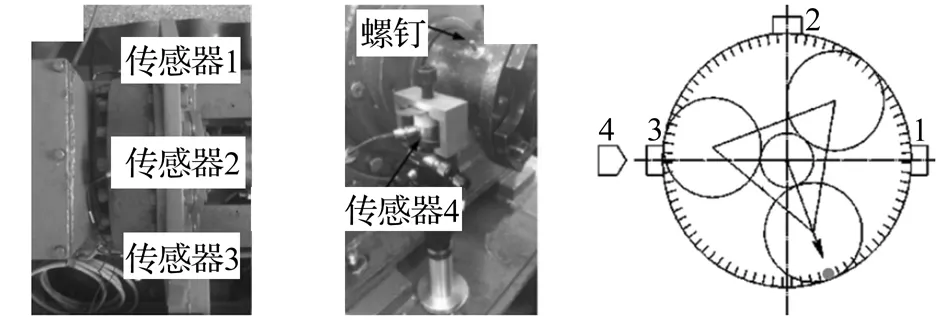
(a)前三通道传感器的实际布置位置(b)第四通道传感器的实际布置位置(c)为检测原理图图6 传感器布置方式Fig.6Thearrangementofsensors
为了对齿轮箱所存在的故障进行诊断,实验中采集了时长为11 s的连续信号,4个通道的时域图如图7所示,从图中可以观察到有12组脉冲呈周期性等间距分布,但其中个别信号并不明显,如第1通道中的2、8,第2通道中的3、8,以及全部3个通道的第10组信号。从信号的分布规律可以推算出相邻脉冲组之间的时间间隔约为0.9 s,即脉冲的频率约为1.11 Hz,与理论计算的行星轮故障特征频率1.12 Hz十分接近。为了进一步确认行星轮故障,从图8所示的包络谱中可以清晰地找出行星轮故障特征频率1.11 Hz及其倍频2.24 Hz、3.35 Hz,因此,可以确认行星轮存在故障。
此外,图7(d)中通道4脉冲不仅提供了行星架的转速信息,而且在已知行星架旋转方向的前提下,通过计算通道4脉冲与前3通道的脉冲的时间差占行星架旋转周期的比例,便可得到图6(c)中的故障点与传感器4相对于齿圈几何中心的矢量夹角。从而得到故障行星轮故障齿与齿圈啮合的准确位置,如图9中所示实心圆点标记处。
4.2 行星轮故障的定位
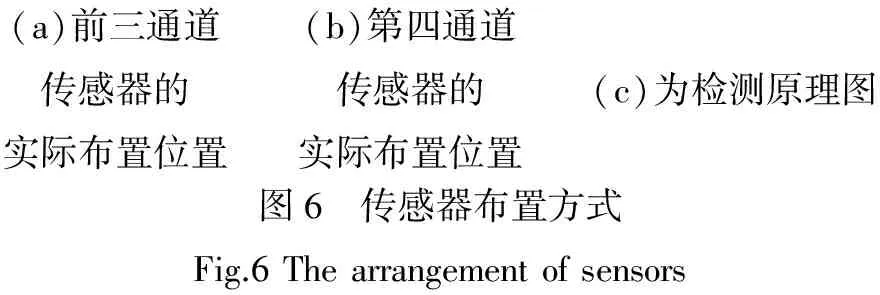
图7中的12组脉冲信号DB值如表3中所示。根据DB值随距离增加而衰减的线性关系,可得方程组(4),4个方程分别对应于声发射源所可能存在的四个象限。
(4)
式中:xi为通道i(i=1,2,3)的DB值;x为声发射源的虚拟DB值;θ为故障碰撞位置对应的角度。此外,该方程组有一个隐性判定条件,即,x1,x2,x3的最大值,即声源处幅值最大。解方程组可得表4中的各θ值。
为了更直观的呈现出定位结果,可将表4中的各值(声发射诊断位置)用黑点标记在图9中,如图10所示。从图中可以看出诊断的平均相对误差约为4个齿,小于6%。对于实际中的故障行星轮定位而言,在未知螺钉与故障行星轮的对应关系时,需要反推出故障行星轮轴心及螺钉位置相对于齿圈几何中心的夹角,从而可以确定离计算出的故障行星轮轴心最近的行星轮存在故障。因此,从信号幅值衰减的角度对故障行星轮进行定位存在理想的效果,是一种实用的定位方法。
表3 前3通道的12组短波形的DB值

图7 行星轮剥落故障实验4通道时域波形图Fig.7 The waveforms of 4 channels in planet gear chipping fault diagnosis experiment
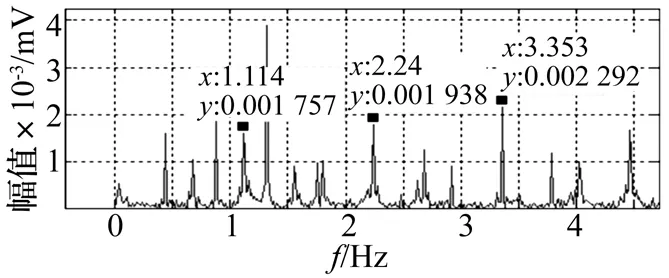
图8 行星轮剥落故障实验1通道信号包络谱Fig.8 The envolope spectrum of signals in channel 1
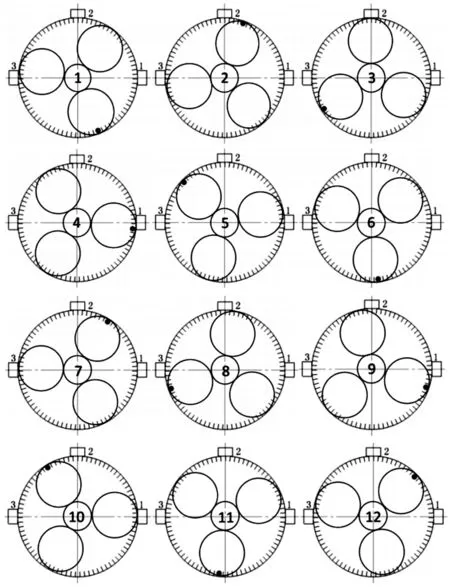
图9 行星轮故障齿理论啮合位置(图中黑点位置)Fig.9 The 12 groups of theoretical collide positions (shown as black points)

123456θ/(°)319.587.9239.3302.1128.5268.8789101112θ/(°)78.5212.3296.1116.6270.951.4
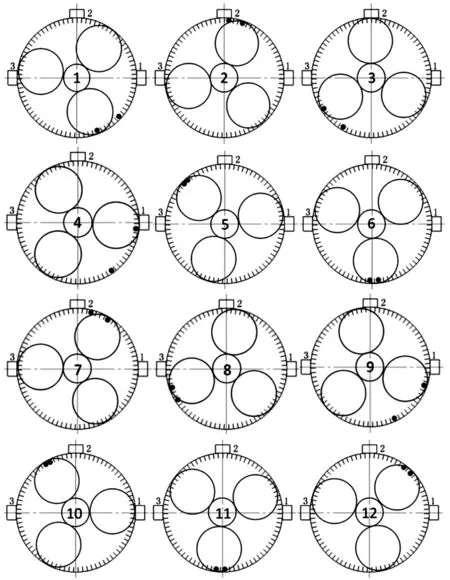
图10 行星轮故障齿定位结果(图中黑点位置)Fig.10 The results of fault planet gear localization (shown as black points)
5 结 论
通过断铅实验验证了声发射信号在齿轮中的衰减幅度远小于不同齿轮之间的衰减幅度,且在单一齿轮构件中信号的衰减模式与理论衰减模式(即信号幅值随传播距离增加呈指数衰减)十分相似,一定程度上简化了齿轮箱定位模型并有利于提高定位的精度。同时,通过信号幅度随信号传播距离增加而呈指数衰减,建立了故障源定位方程组,并可由该方程组解得齿圈上与故障齿啮合的轮齿位置,从而判断出是哪一个行星轮出现故障。
[ 1 ] 雷亚国, 何正嘉, 林京. 行星齿轮箱故障诊断技术的研究进展[J]. 机械工程学报, 2011,47(19): 59-64. LEI Yaguo, HE Zhengjia, LIN Jing.Research advances of fault diagnosis technique for planetary gearboxes[J]. Journal of Mechanical Engineering, 2011,47(19): 59-64.
[ 2 ] RAMDANE Y, NACER H, NOUREDINE O, et al. Perceptual study of the evolution of gear defects[J]. Applied Acoustics,2015, 99: 60-67.
[ 3 ] 郝如江, 卢文秀, 褚福磊. 声发射检测技术用于滚动轴承故障诊断的研究综述[J]. 振动与冲击, 2008, 27(3): 75-79. HAO Rujiang, LU Wenxiu, CHU Fulei.Review of diagnosis of rolling element bearings defaults by means of acoustic emission technique[J]. Journal of Vibration and Shock,2008,27(3):75-79.
[ 4 ] HOLROYD T. Acoustic emission & ultrasonics monitoring handbook[M]. Oxford: Coxmoor Publishing Company, 2000.
[ 5 ] MBA D, RAO R B K N. Development of acoustic emission technology for condition monitoring and diagnosis of rotating machines:bearings, pumps, gearboxes, engines and rotating structures[J]. Shock and Vibration Digest, 2006, 38(1):3-16.
[ 6 ] NIRI E D, FARHIDZADEH A, SALAMONE S. Determination of the probability zone for acoustic emission source location in cylindrical shell structures[J].Mechanical Systems and Signal Processing, 2015, 60/61: 971-985.
[ 7 ] EATON M J, PULLIN R, HOLFORD K M. Acoustic emission source location in composite materials using Delta T mapping[J]. Composites Part A: Applied Science and Manufacturing, 2012, 43(6): 856-863.
[ 8 ] WANG Q, CHU F. Experimental determination of the rubbing location by means of acoustic emission and wavelet transform[J]. Journal of Sound and Vibration, 2001, 248(1): 91-103.
[ 9 ] LI R, SECKINER S U, HE D, et al. Gear fault location detection for split torque gearbox using AE sensors[J]. IEEE Transactions on Systems Man and Cybernetics Part C, 2012, 42(6):1308-1317.
[10] 于江林. 滚动轴承故障的非接触声学检测信号特性及重构技术研究[D].大庆: 大庆石油学院, 2009.
Faulted planet gear positioning based on attenuation characteristics of AE signals
ZHANG Yu, LU Wenxiu, CHU Fulei
(Department of Mechanical Engineering, Tsinghua University, Beijing 100084, China)
Planet gearbox is a crucial component of a wind turbine device, faults are easily caused during it working under complex circumstances, such as, low velocity and heavy load, simultaneous spin and revolution. Its fault diagnosis, especial, faulted planet gear positioning is always focal and difficult to study. Here, the test devices for a planetary gearbox were built to analog planet gear faults, the faulted planet gear positioning was performed with acoustic emission (AE) signals. Firstly, propagation characteristics of acoustic emission signals within and between gears were investigated, the fault positioning model was simplified with the amplitude attenuation characteristics of AE signals. Secondly, equations for fault souce positioning was established based on the exponential decay relation between signal amplitude and its propagation distance to obtain the mesh position of faulted teeth. Furthermore, the position of a faulted planted gear was determined. The test results showed that the location of a faulted planet gear can be accurately determined with the amplitude attenuation characteristics of AE signals.
acoustic emission; attenuation characteristics; planet gear; positioning
国家自然科学基金(51175279)
2015-11-25 修改稿收到日期:2016-01-25
张宇 男,硕士,1990年生
卢文秀 男,博士,副教授,1974年生
TH132.41;TK83
A
10.13465/j.cnki.jvs.2017.03.003
