回转式起重机输入整形防摆控制研究
2017-03-07李伯全付文涛许军成
李伯全,付文涛,许军成
(江苏大学 机械工程学院,江苏 镇江 212013)
回转式起重机输入整形防摆控制研究
李伯全,付文涛,许军成
(江苏大学 机械工程学院,江苏 镇江 212013)
针对回转式起重机作业过程引起吊重摆动导致生产效率降低,构成安全隐患的问题,应用输入整形技术抑制起重机吊重摆动。对回转式起重机进行分析,建立回转式起重机数学模型;阐述输入整形防摆原理,设计回转式起重机防摆输入整形器,并在Matlab/Simulink中对加入防摆输入整形器的起重机模型进行了回转及俯仰运动的仿真分析。研究结果表明,输入整形在抑制回转式起重机吊重摆动方面有明显的效果,具有一定的工程价值。
回转式起重机;输入整形;防摆;Matlab
回转式起重机大多采用柔性绳索来起吊或转运货物,其作业过程中起升、回转及变幅机构的非线性动作不可避免的会引起吊重的摆动[1]。这种摆动不仅使吊重无法精准定位于卸料点,从而导致作业效率的降低,也可能会造成货物或者设备的损坏,造成重大经济损失,而且对作业人员的人身安全也将构成威胁,故克服起重机作业过程中吊重的摆动是起重机控制领域研究的重要内容。
回转式起重机吊摆系统的模型不仅较为复杂,存在较强的非线性,而且是多参数输入与输出相互耦合的系统,这就使得传统的控制方法难以达到起重机吊摆系统作业过程的防摆要求[2]。本文采用开环控制策略的输入整形控制技术,设计了一种回转式起重机的防摆输入整形器,通过对影响回转式起重机摆动的回转运动和俯仰运动输入变量的整形控制达到抑制吊重摆动的目的。
1 回转式起重机数学模型
回转式起重机由安装于支持面的立柱,以立柱为旋转中心的吊臂以及柔性卷扬机构等构成,吊重通过柔性绳索绕过吊臂的顶端的滑轮悬挂下来,在起升卷扬机构的带动下实现升降运动;吊臂在回转机构和变幅卷扬机构的带动下可分别实现水平面内的回转运动和垂直平面内的俯仰运动[3],实物如图1(a)所示。将回转式起重机的实物模型简化为如图1(b)所示的物理模型。
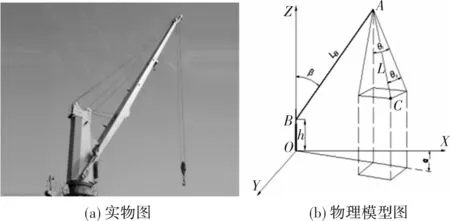
图1 回转式起重机实物和物理模型
图1(b)中,以支撑面所在水平面为XOY平面,以与支撑面垂直的起升机构向上方向为Z轴方向建立惯性坐标系。LB为吊臂的长度;L为钢丝绳的长度;C点为吊重的位置;m为吊重C的质量;A为吊臂顶端位置,吊臂与回转平台连接处B到支撑面所在的平面的距离为h。系统回转角度α为吊臂在XOY面的投影线与水平X轴的夹角;系统俯仰角度β为吊臂与Z轴的夹角的余角;θ1为吊臂平面内的摆角;θ2为平面外的摆角。考虑回旋式起重机在工作中吊重摆角一般很小,根据拉格朗日方程可以得到回转式起重机的数学模型
(1)
2 输入整形器
输入整形是向系统中刻意引入时滞环节,主要是通过一系列不同幅值和时滞时间的脉冲序列与系统的输入变量进行卷积,并用卷积产生的整形命令驱动控制系统来达到抑制或消除控制对象振动的目的,输入整形可以抵消掉输入变量中能够引起系统振动的那部分自然频率,从而有效的避免了控制对象的振动模态[4]。

图2 输入整形器对输入信号的整形过程
由n个脉冲组成的输入整形器的传递函数为
(2)
其中,n为脉冲序列的脉冲数;为第i个脉冲的幅值;为第i个脉冲的时滞。
根据灵敏度曲线法来设计输入整形器。灵敏度曲线法一般是通过定义系统参数和模型参数的关系即系统参数灵敏度来消除系统残余振动的[5]。
对于一个二阶系统,为了便于对基于输入整形控制器下的系统振动幅度大小进行比较,系统残余振动的概念被提出,它是以有输入整形控制器作用下和无输入整形控制器作用下的系统的单位脉冲响应与系统的单位脉冲响应的幅值之比来描述的。系统残余振动的幅值可以用无量纲的残余振动表达式来描述[6]
其中,
(3)
(4)

3脉冲输入整形器为零振动微分输入整形器(Zero Vibration and Derivation Input Shaper),简称ZVD输入整形器,比最简单的2脉冲输入整形器(Zero Vibration input shaper,ZV输入整形器)对系统频率变化的鲁棒性要强[7-8]。
由此可得3脉冲输入整形器的脉冲幅值及其时滞情况如下
(5)
(6)
其中,T为系统的半振动周期;K为参数
(7)
根据式(1),当不考虑起重机升降运动和系统回转及俯仰运动对负载摆动影响的情况下,回转式起重机吊摆系统的数学模型也可简化为两个二阶系统。起重机作业过程中吊重在吊臂平面内和吊臂平面外的摆角都比较小,约为10°,那么根据单摆摆动角频率的概念可知,回转式起重机在吊臂平面内外摆动的固有频率为
(8)
这里取绳长L=15 m,重力加速度g=9.8 m/s2,那么,系统的固有频率ω为0.808 2。考虑到阻尼的影响,取阻尼系数ε为0.1,则由式(5)和式(6)可得回转式起重机的ZVD输入整形防摆控制器的脉冲幅值及时滞的值
(9)
(10)
由式(2)可得ZVD输入整形防摆控制器的传递函数F(s)=0.334 4+0.487 7 e-3.906 7s+0.177 9 e-7.813 4s
(11)
频率灵敏度曲线和阻尼比灵敏度曲线如图3所示,从图中可以看出频率和阻尼比的变化对系统残余振动的影响较为平缓,输入整形防摆控制器有较强的鲁棒性。
3 仿真分析
回转式起重机系统的模型可简化为两个二阶系统,根据式(1)可建立Matlab/Simulink仿真模型如图4所示。ZVD输入整形防摆控制器如式(7)所示,为了验证ZVD防摆输入整形器的防摆效果,建立加入输入整形的回转式仿起重机真模型如图4所示,并将加入输入整形器和未加输入整形器起重机进行回转与俯仰运动时吊重摆动的状况进行对比。
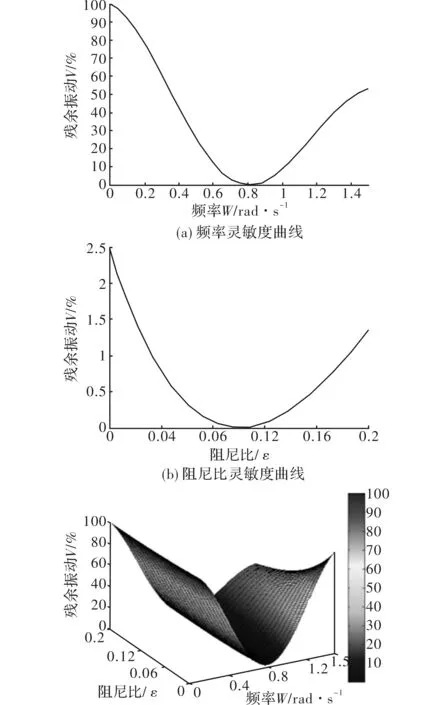
图3 回转式起重机的ZVD输入整形器的灵敏度曲线

图4 回转式起重机仿真模型

图5 加入输入整形的回转式起重机仿真模型
(1)回转运动分析。
给以起重机的回转运动是加速-匀速-减速的运动情况:回转加速运动时间2 s,加速度为15 deg/s2;匀速运动时间1 s,匀速速度为30 deg/s ;减速运动时间 2 s,加速度为-15 deg/ s2。输入整形前后起重机运动情况和吊重摆动情况如图5和图6所示。
由图6(a)所示,回转运动下输入整形后的回转运动输入被分解成了若干次加速、匀速和减速的过程。由图6(b)所示,回转运动下整形前后起重机的回转角度没有发生变化,只不过增加了达到该回转角度的时滞时间。

图6 输入整形前后回转运动情况
由图7(a)所示,回转运动下整形后的系统吊重在吊臂平面内的摆动情况明显得到了抑制;由图7(b)所示,回转运动下输入整形后的系统吊重在吊臂平面外的摆动情况也明显得到了抑制;从上述分析可知,回旋式起重机的ZVD输入整形器在回转运动下抑制吊重在吊臂平面内和吊臂平面外的摆动情况上有明显的效果。
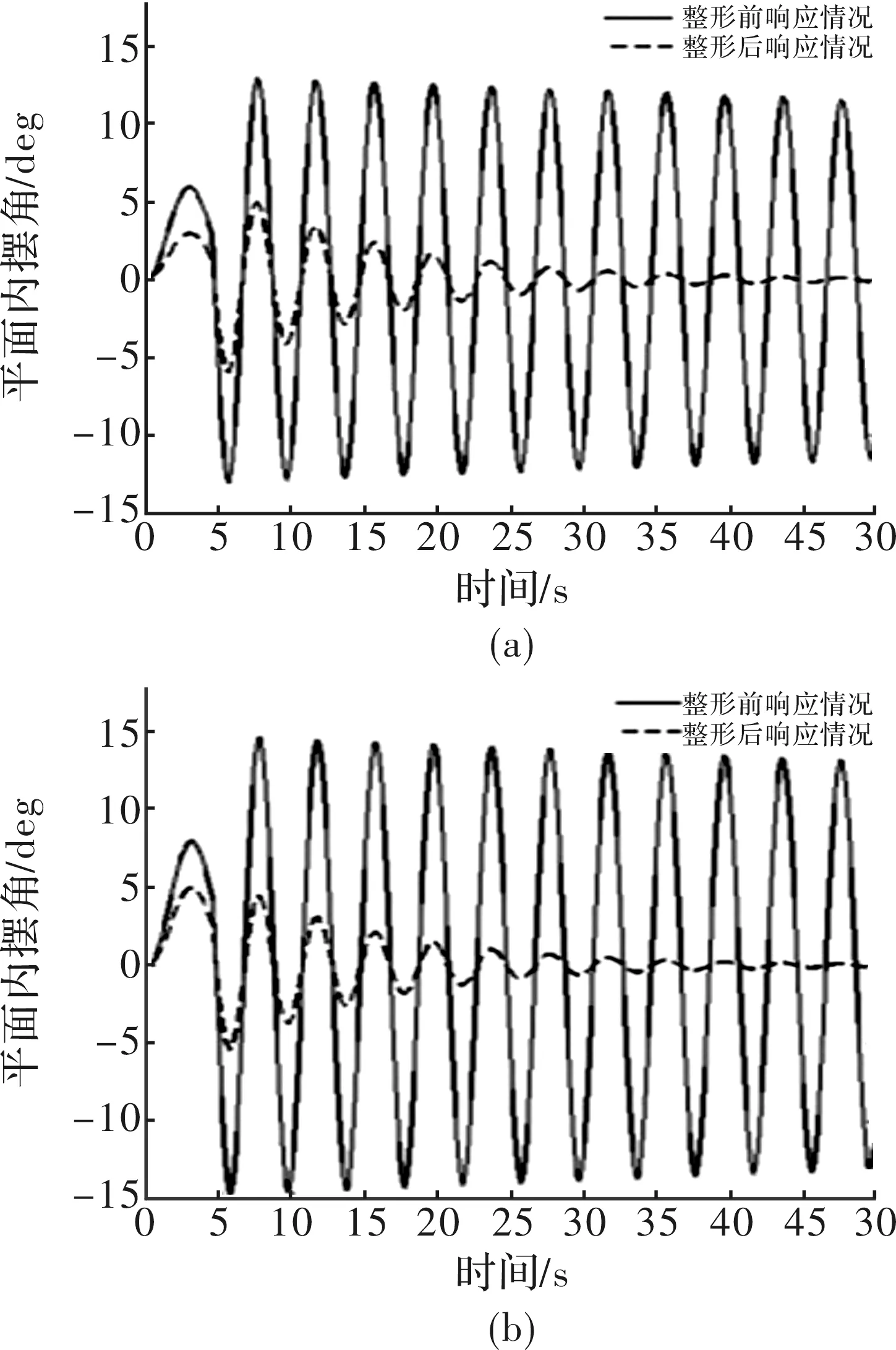
图7 输入整形前后吊重摆动情况
(2)俯仰运动分析。
同样给定加速-匀速-减速的俯仰运动过程:俯仰加速运动时间2 s,加速度为5 deg/s2;匀速运动时间1 s,匀速速度为10 deg/s;减速运动时间 2 s,加速度为-5 deg/s2。输入整形前后起重机俯仰运动情况和吊重摆动情况如图8和图9所示。
与回转运动相似,由图8(a)所示,俯仰运动下输入整形后的系统俯仰运动输入也被分解成了若干次加速、匀速和减速的过程。由图8(b)可以看出,俯仰运动下输入整形前后系统的俯仰角度没有发生变化,只不过增加了达到该俯仰角度的时滞时间。
由图9(a)所示,俯仰运动下输入整形后的系统吊重在吊臂平面内的摆动情况明显得到了抑制;由图9(b)所示,俯仰运动下输入整形前后的系统输入均对吊重在吊臂平面外的摆动情况没有任何影响。从上述分析可知,ZVD输入整形器在起重机俯仰运动下抑制吊重在吊臂平面内摆动情况上也有明显的效果[10]。

图8 整形前后起重机的回转运动情况

图9 输入整形前后吊重摆动情况
4 结束语
本研究在分析回转式起重机结构的基础上,建立了回旋式起重机的数学模型;将输入整形应用于回转式起重机的防摆控制上,设计防摆输入整形器;根据回旋式起重机的数学模型在Matlab/Simulink中建立了加入输入整形的回旋起重机仿真模型。
对加入输入整形前后起重机模型分别进行回转及俯仰运动仿真分析,得到了两个运动状态下的吊重防摆效果,结果表明输入整形对回旋式起重机吊重的摆动有明显的抑制效果。
[1] 徐军,汪伟刚.起重机防摇控制研究综述[J].造船技术,2013, 41(2):25-30.
[2] 董明晓,刘伟民.回转塔式起重机动力学模型及时滞控制研究[J].应用基础与工程科学学报, 2005,13(s1) :70-75.
[3] 张晓华,贾智勇.基于输入整形策略的船上回转吊车防摆控制[J].控制工程,2008,15(3):245-249.
[4] 任会礼,付玲,梅志千,等.基于输入整形的起重机消摆控制研究进展[J].电气与自动化, 2013, 42(36):163-167.
[5] 王晓军,邵惠鹤.时变输入整形在桥式起重机防摆控制中的应用[J].系统仿真学报,2007, 19(3):623-626.
[6] 李斌.桥式起重机的防摇问题及其分析与仿真[J].重庆交通学院学报,2005, 24(3):138-141.
[7] 王克琦.桥式起重的定位和防摆控制研[J].系统仿真学报, 2007, 19(8):1799-1802.
[8] 脱建智,孙伟,朱勇.通用门式起重机动力学建模与Matlab仿真[J].硅谷,2012, 11(19):174-175.
[9] 经迎龙,熊静琪,王富亮.输入整形器在折叠式高空作业车防摆控制上的应用[J].噪声与振动控制,2011,31(2):38-42.
[10] 姜银方,姬胜杰,潘凌云,等.回转式起重机单摆系统的建模与仿真分析[J].电子科技,2015,28(10):22-26.
Control of Anti-swaying of the Rotary Crane Based on Input Shaping
LI Boquan,FU Wentao,XU Juncheng
(School of Mechanical Engineering, Jiangsu University, Zhenjiang 212013, China)
In view of the low production efficiency and safety problems caused by payload swaying during the work of rotary crane, the input shaping technique is applied in anti-swaying control. After an analysis of the rotary crane, the mathematical model of rotary crane is constructed. The principles of input shaping used in anti-swaying control are elaborated, and an input shaper for anti-swaying control of rotary crane is designed. Based on the simulation model of rotary crane with input shaper established in Matlab/Simulink, swivel and tilt movement of rotary crane are analyzed. The results indicate that input shaping has a good effect in anti-swaying control of rotary crane.
rotary crane; input shaping; anti-swaying; Matlab
2016- 04- 08
李伯全(1956-),男,博士,教授,博士生导师。研究方向:机电一体化等。付文涛(1993-),男,硕士研究生。研究方向:机械装备智能控制。
10.16180/j.cnki.issn1007-7820.2017.02.028
TH21
A
1007-7820(2017)02-105-05
