基于增广NMSS模型的预测函数控制研究
2017-03-07黄武程苏成利施惠元蔡宏斌
黄武程, 苏成利, 施惠元,, 蔡宏斌
(1.辽宁石油化工大学 信息与控制工程学院,辽宁 抚顺 113001; 2.西北工业大学 自动化学院,陕西 西安 710072)
基于增广NMSS模型的预测函数控制研究
黄武程1, 苏成利1, 施惠元1,2, 蔡宏斌2
(1.辽宁石油化工大学 信息与控制工程学院,辽宁 抚顺 113001; 2.西北工业大学 自动化学院,陕西 西安 710072)
针对一类具有输出响应波动大、时滞性大的问题,提出了一种基于增广非最小状态空间(NMSS)模型的预测函数控制(PFC)算法。该算法利用阶跃响应数据建立传递函数模型,将其离散化并转换为状态空间模型的形式,通过将延迟输入与误差扩展到状态变量中,得到一种增广的状态空间模型。为了增强输入控制量的规律性,提高相应的快速性和准确性,把输入表示为若干基函数线性组合,最后求出基函数系数便可求得控制信号。仿真结果表明该算法有较好的控制精度和良好的跟踪控制性能。
非最小状态空间; 预测函数控制; 基函数; 控制精度; 跟踪控制
模型预测控制(Model Predictive Control, MPC)[1-3]是20世纪70年代产生的一种计算机控制方法,在空间技术等领域的应用非常成功。经典的MPC方法有模型算法控制(MAC)[4]、动态矩阵控制(DMC)[5]和广义预测控制算法(GPC)[6]等。但是工业过程控制中难以建立较为准确的模型,并且存在大滞后、非线性等众多问题,使得工业过程控制遇到了许多难题。
由于模型预测控制具有建模简单、实现容易等特点,近年来国内外很多学者对其进行了大量的研究并在此基础上进行了扩展。基于状态空间的模型预测控制算法同样得到了广泛的研究。P.C.Yong等[7]最早将非最小相位状态空间(NMSS)模型应用。
在PIP(比例积分比例)控制中, NMSS模型得到广泛的应用。文献[8]采用一种非最小状态空间模型,状态由历史时刻的输入与输出组成,提出了一种基于无限时域的模型预测控制算法,克服了状态估计问题。文献[9]提出了一种具有比例、积分、微分结构的多变量广义预测控制算法,采用差分方程基础上的状态空间方程作为预测模型,算法简化,实用性强。文献[10]提出了一种基于支持向量机的预测函数控制算法,并将其应用于延迟焦化炉中,提高了出口温度的稳定性与精确度。文献[11]提出了一种改进的多变量非最小相位状态空间模型预测控制算法,应用于密封舱土压平衡控制,通过多步预测推出预测输出,最后进行优化求解。文献[12]将NMSS模型应用在预测控制器中,并且成功应用于球杆系统中。文献[13]针对传统的模型预测控制器鲁棒性较差及模糊PID控制系统比较复杂的问题,提出了增广非最小状态空间模型预测控制算法, 并且建立了稳定平台控制系统,对导向钻井稳定平台控制系统研究表明了该方法的有效性。文献[14]利用改进NSGA-Ⅱ(非支配排序遗传算法)对目标函数进行求解。
然而,由于大滞后和输出波动大的问题,仅仅利用状态空间模型预测控制是不够理想的。预测函数控制[15]是一种新颖的预测控制算法,通过引入基函数的概念增强了输入控制量的规律性,而且提高了相应的快速性和准确性。因此,本文提出了一种基于非最小相位状态空间(NMSS)模型的预测函数控制(PFC)算法。该算法是以非最小状态相位空间模型为基础,以基函数线性组合为输入,最终求得控制量。仿真结果表明算法有较好的控制精度,并且具有良好的跟踪控制性能和较强的鲁棒性。
1 基于增广NMSS模型的预测函数控制
增广非最小状态空间模型预测控制是利用阶跃响应数据建立传递函数模型,将模型转换为状态空间的形式并将其离散化,通过将历史时刻的输入、输出与误差扩展到状态变量中,得到一种增广的状态空间模型。为了增强输入控制量的规律性,提高相应的快速性和准确性,把输入表示为若干基函数线性组合,最后求出基函数系数便可求得控制信号。
1.1 预测模型
一个具有延迟的单输入单输出(SISO)控制系统的连续状态空间模型可离散化为:
(1)
式中,u(k-d)表示控制输入变量;y(k)表示输出变量;xd(k)表示k时刻的状态变量;Ad、Bd、Cd分别表示为系数矩阵。
为了更好地分析和设计,把u(k-1),u(k-2),…,u(k-d)扩展到系统的状态变量,u(k)作为输入,可以得到以下扩展后的系统模型:

(2)
式中,
x(k)=[xd(k)Tu(k-d)u(k-d+1) …u(k-1)];


0表示n行一列的零向量;T表示转置。
对式(2)两边取增量可得:

(3)
式中,Δ表示差分算子,Δ=1-z-1起减小误差的作用。
定义期望输出为r(k),输出误差为e(k),则:

(4)
由式(3)和式(4)可得:
e(k+1)=e(k)+CAΔx(k)+CBu(k)-CBu(k-1)-Δr(k+1)
(5)


(6)

1.2 控制器设计
(1) 目标函数
考虑如下最优问题,目标函数为:
(7)
式中,p表示预测步长;Qj表示(n+d+1)×(n+d+1)维的系统的权重矩阵,z(k+j)表示新系统的输出。通常:
(8)
(2)控制器
由预测函数控制可知,其输入是由若干基函数的线性组合,其输入表示如下:
(9)
式中,μj表示权重系数;fj(i)表示在采样时间i时基函数的值;N表示基函数的个数,由系统的模型决定。

(10)
式(10)进一步可以表示为:
因此,ΔR为设定值变化量,Z为状态向量,可以表示为:

(11)
式中,F,G,S,Φ表示系数矩阵。
把目标函数(7)写成向量的形式可得:
J=ZTQZ
(12)
式中,Q=block diag{Q1,Q2,…,Qp}。
通过把式(11)代入式(12),找到目标函数的最小值,得到优化控制向量为:
γ=-(ΦTQΦ)-1ΦTQ(Fz(k)-Gu(k-1)+SΔR)
(13)
从而可以定义:
μ1=-(1,0,0,…,0)(ΦTQΦ)-1ΦTQ(Fz(k)-Gu(k-1)+SΔR)
=-h1z(k)+hu1u(k-1)-m1ΔR
μ2=-(0,1,0,…,0)(ΦTQΦ)-1ΦTQ(Fz(k)-Gu(k-1)+SΔR)
=-h2z(k)+hu2u(k-1)-m2ΔR
⋮
μN=-(0,0,0,…,1)(ΦTQΦ)-1ΦTQ(Fz(k)-Gu(k-1)+SΔR)
=-hNz(k)+huNu(k-1)-mNΔR
(14)
当前时刻的控制信号为:
(15)
其中:
(16)
2 仿真研究与性能分析
本文以基于非最小状态空间模型的预测函数控制(PFC)器为外层,常规PID控制器为内层。外层是以内层PID闭环回路为广义控制对象的监督控制,外层先进控制器的输出用来修正内层PID控制器的设定值,先进控制器的输入SV为设定值。
选用如下的数学模型,将其离散化后传递函数为:
(17)
(18)


(19)


分别采用文献[13]控制策略和本文提出的基于增广非最小状态空间模型的预测函数控制策略进行仿真设计。基于增广非最小状态空间模型的预测函数控制参数为:预测时域Ny为30,采样周期Ts为70 s,权重矩阵Q为单位矩阵。输出的设定值为5。在600 s和1 200 s对其加入阶跃干扰。仿真结果如图1—4所示。
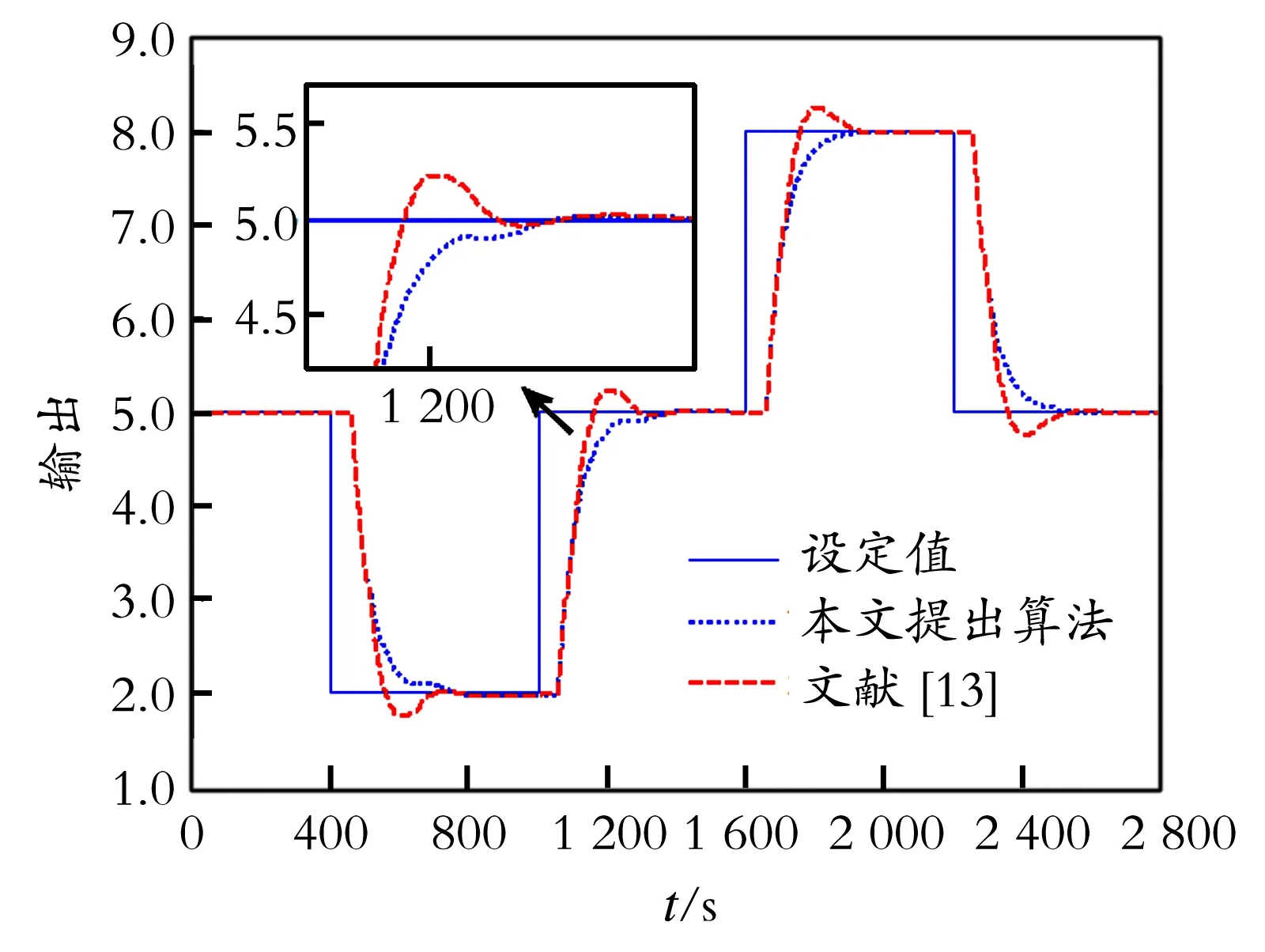
图1 系统响应输出
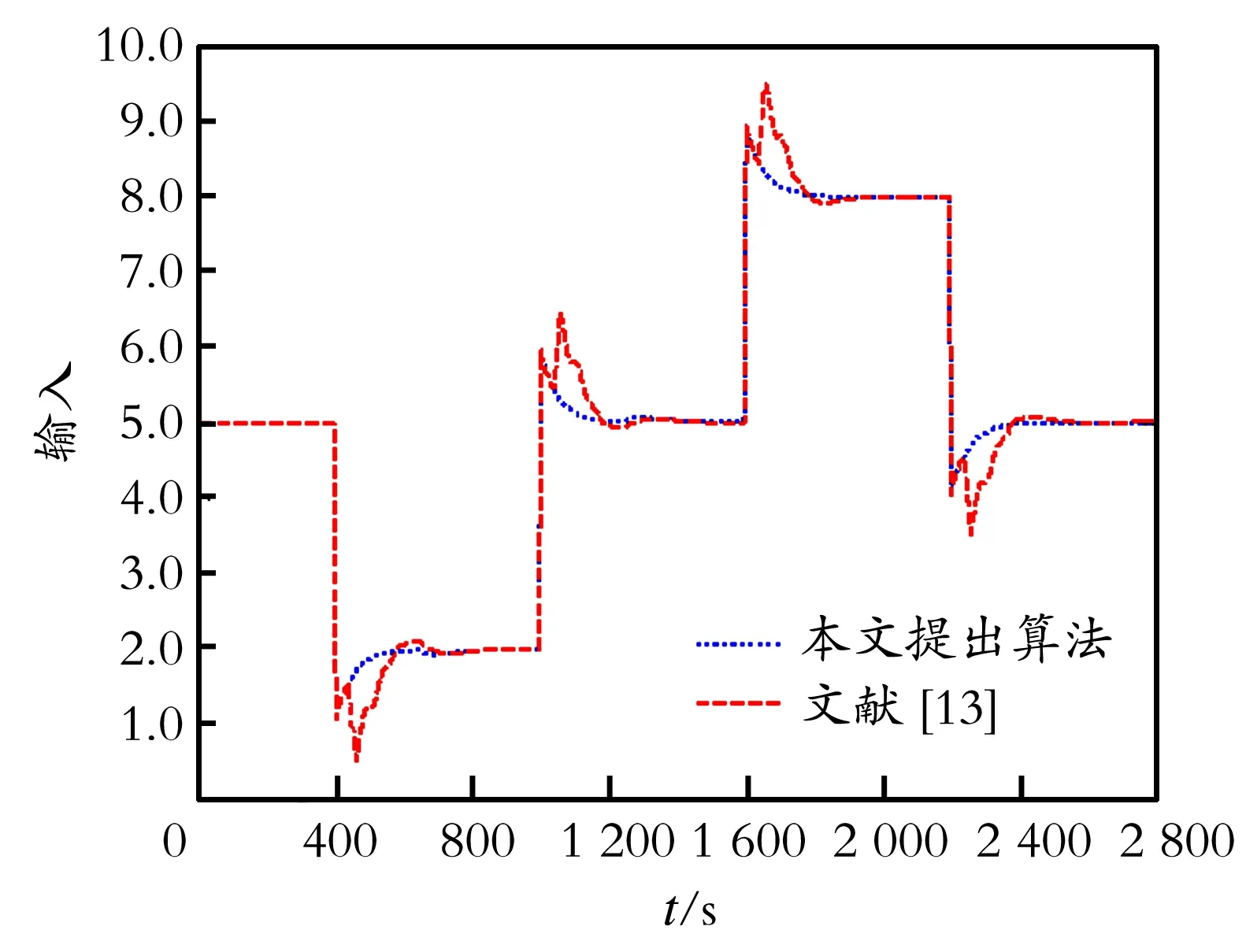
图2 系统控制量

图3 干扰作用下的系统响应输出
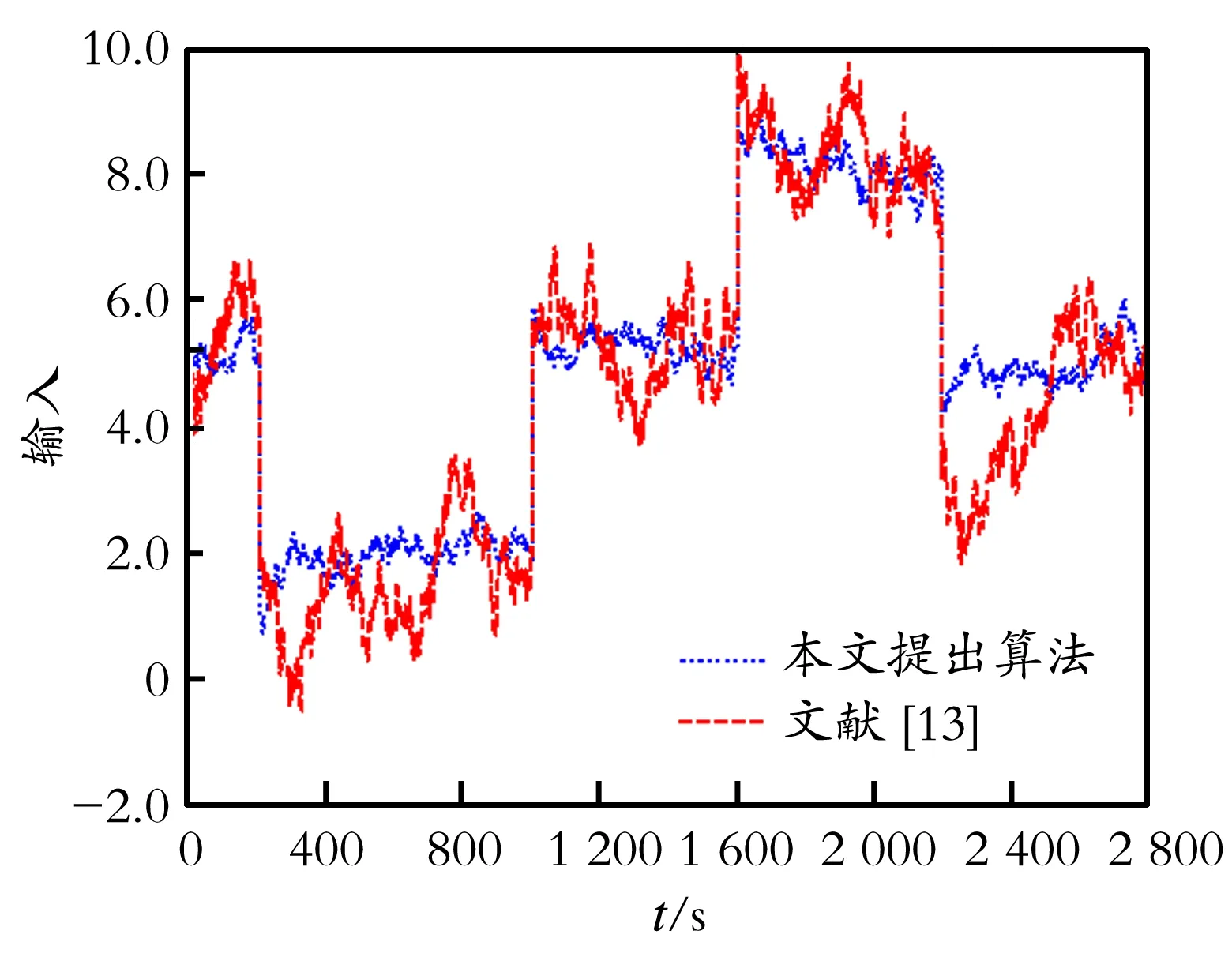
图4 干扰作用下的系统控制量
从图1的仿真结果可以看出,本文提出的增广状态空间模型预测控制输出在设定值附近的变化范围小,抗干扰性强,超调量小,能很好地跟踪设定值;而文献[13]控制策略超调量大,跟踪效果比较差。所以本文提出的算法能更好地跟踪设定值,且波动范围小,能够更快地达到平稳状态。由图2仿真结果可以看出,本文提出的控制策略控制量波动小,跟踪能力强,显然要优于文献[13]控制策略。
由图3和图4仿真结果可以看出,在随机干扰作用下,本文提出的控制策略响应输出和控制量波动更小,抗干扰能力更强。因此本文所提的控制策略优于文献[13]控制策略,具有良好的控制效果和优良的跟踪性能。
3 结 论
为了解决一类具有输出响应波动大、稳定性差、难以控制的问题,本文提出了一种基于非最小状态空间(NMSS)模型的预测函数控制(PFC)算法。基于一个离散的线性模型进行了仿真设计,并与文献[13]控制算法的控制效果进行比较, MATLAB仿真结果表明本文算法有较好的控制精度,并且具有良好的跟踪控制性能和较强的鲁棒性。
[1] 王建国,苟晓卫.基于在线辨识的锅炉中间点温度GPC-PID控制[J].控制工程,2013,20(4):631-634.
[2] 孙秀云,方勇纯,申辉,等.无人直升机姿态通道模型预测控制[J].控制工程,2014,21(5):643-647.
[3] Shi H Y,Su C L,Cao J T,et al. Nonlinear adaptive predictive functional control based on the Takagi-Sugeno model for average cracking outlet temperature of the ethylene cracking fumace[J]. Industrial Engineering Chemistry Research,2015,54(6):1849-1860.
[4] Richalet J,Rault A,Testud J,et al. Model predictive heuristic control:Application to industrial processes[J]. Automatica,1978,14(5):413-428.
[5] Cutler C R,Ramaker B L. Dynamic matrix control—A computer controlalgorithm[C].//San Francisco:Proceedings of the Joint Automatic Control Conference,1980(17):72.
[6] Clarke D W,Mohtadi C,Tuffs P S. Generalized predictive control[J]. Automatica,1987,23(2):137-148.
[7] Young P C,Behzadi M A,Wang C L,et al. Direct digital and adaptive control by input-output,state variable feedback pole assignment[J]. International Journal of Control,1987,46:1867-1881.
[8] González A H,Perez J M,Odloak D. Infinite horizon MPC with non-minimal state space feedback[J]. Journal of Process Control,2009,19(3):473-481.
[9] 郭伟,陈琛,王汉杰,等. 一种改进的多变量广义预测控制在球磨机制粉系统中的应用[J]. 控制工程,2016,23(1):48-53.
[10] Zhang R D,Wang S Q. Support vector machine based predictive functional control design for output temperature of coking furnace[J]. Journal of Process Control,2008,18(5):439-448.
[11] 宋英莉,刘宣宇,张凯举,等. IMNMSSPC算法在盾构机土压平衡控制中的应用[J/OL].计算机工程与应用, http://www.cnki.net/kcms/detail/11.2127.TP.20151028.1628.052.html.
[12] Zhi X,Hesketh T. MPC with a NMSS model[C]. Guangzhou:2007 IEEE International conference on control and automation,2007:2277-2281.
[13] 霍爱清,戴晨,汪跃龙,等.增广非最小状态空间法的稳定平台预测控制研究[J].计算机工程与应用,2013,49(17):239-244.
[14] 周怡, 苏成利. 基于改进NSGA-Ⅱ算法的氯乙烯精馏过程多目标优化[J]. 辽宁石油化工大学学报, 2016,36(2):52-59.
(编辑 陈 雷)
Research of Predictive Functional Control Based on Extended NMSS Model
Huang Wucheng1, Su Chengli1, Shi Huiyuan1,2, Cai Hongbin2
(1.SchoolofInformationandControlEngineering,LiaoningShihuaUniversity,FushunLiaoning113001,China; 2.SchoolofAutomation,NorthwesternPolytechnicalUniversity,Xi'anShaanxi710072,China)
The predictive functional control algorithm based on extended non-minimal state space model(NMSS) is proposed to solve the problem of big fluctuation of output and large delay. A transfer function model was set up via the step-response then discretized and transformed into state space model.The extended state variables consisted of delayed input and error.To enhance the regularity, quickness and accuracy of the input control variable,the input was expressed as linear combination of some basis function. Finally the control signal can be obtained through the coefficient of basis function. The simulation results showed the proposed algorithm had good control accuracy and tracking ability.
Non-minimal state space; Predictive functional control; Basis functional; Control accuracy; Tracking ability
1672-6952(2017)01-0061-04
投稿网址:http://journal.lnpu.edu.cn
2016-09-06
2016-10-09
国家自然科学基金项目(61673199);辽宁省高校优秀人才支持计划项目(LJQ2015061)。
黄武程(1990-),男,硕士研究生,从事工业过程控制优化、模型预测控制方向研究;E-mail:m18341350279@163.com。
苏成利(1977-),男,博士,教授,从事模型预测控制、工业过程的先进控制与优化等方向研究;E-mail:sclwind@sina.com。
TP29
A
10.3969/j.issn.1672-6952.2017.01.012
