多叶片螺旋翼模型研究
2017-03-06魏宗康
吕 腾,魏宗康
(北京航天控制仪器研究所,北京100039)
多叶片螺旋翼模型研究
吕 腾,魏宗康
(北京航天控制仪器研究所,北京100039)
通过计算机构建叶形相同但叶片数量不同的螺旋翼,并且使用流体力学软件进行仿真。仿真结果显示平均单个叶片的升力与叶片的数量成反比例关系。引入空气角速度变量,加入惯性和延迟环节以改进以前的模型。改进后的模型不仅可以计算多叶片螺旋翼的升力,而且可以计算转速变化过程中升力变化的暂态过程。
螺旋翼;升力;多叶片
0 引言
多旋翼无人机中,螺旋翼的选择对其性能有很大的影响。对于叶形相同但叶片数不同的多旋翼,根据经验可知叶片数多的螺旋翼在相同的转速下能提供更大的升力,但也会受到更大的阻力力矩。考虑到多旋翼无人机上能源有限,在能提供足够升力的前提下,阻力力矩最小的螺旋翼是最优选择。
目前,对不同的螺旋翼需要通过试验,单独测量每个螺旋翼的升力和转速,然后使用如下模型计算升力系数C,最终确定该螺旋翼的升力与转速的关系。式(1)中,F是升力,ρ是空气密度,ω是螺旋翼的转速。

该方法的缺点是:1)需要有具体的实物和试验设备;2)相同叶形但不同叶片数量的螺旋翼并不容易获得;3)模型不能反映叶片数与升力的关系。
针对以上问题,本文采用计算机建模的方法构建出相同叶形但不同叶片数量的螺旋翼,采用软件仿真的方法获取螺旋翼与升力的关系,分析叶片数与升力的关系,以改进式(1)。
1 多个叶片的螺旋翼结构
图1是通过计算机构建的二叶桨、三叶桨、四叶桨和五叶桨(分别为图1中的①、②、③和④)。
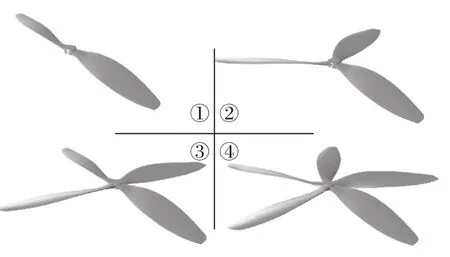
图1 多叶桨结构图Fig.1 Structure of multi⁃blade propeller
图1中,螺旋翼的叶形取自APC11x47型螺旋翼。首先通过三维激光扫描获得螺旋翼的点云数据,然后使用逆向工程软件Imageware和Pro EN⁃GINEER软件将前面获得的点云数据处理成仿真所用的实体结构文件,最后以上一步的结构为基本元素创建叶片数为二、三、四、五的螺旋翼。
2 仿真结果
通过Xflow软件模拟第1小节中构建的4个螺旋翼在4000r/min的转速下所产生的升力和受到的阻力力矩,分别如图2和图3所示。

图2 螺旋翼升力与叶片个数Fig.2 Thrust and the number of blades

图3 螺旋翼阻力力矩与叶片个数Fig.3 Moment and the number of blades
图2中,虚线为假设叶片数与升力和阻力力矩成线性关系的理想曲线,实线为仿真的结果,并且星形为数据点。图2得出螺旋翼的叶片数与升力是非线性关系,单个叶片的平均升力与总叶片数成反比例关系。
图3中虚线、实线和星形的定义与图2一致。图3得出螺旋翼的叶片数与阻力力矩近似于线性关系。升力与阻力力矩之比的绝对值为43.4、37.8、35.1、33.3,说明叶片数多的螺旋翼的升阻比低、效率差。
图4中,实线是从仿真开使到转动一周中螺旋翼的升力变化,先从一个过渡过程开始逐渐稳定。螺旋翼的升力在靠近虚线位置的左侧开始减小,在右侧再趋于稳定,此时的值即为螺旋翼在稳态时的升力。虚线位置所对应的数值刚好为桨叶数的倒数。
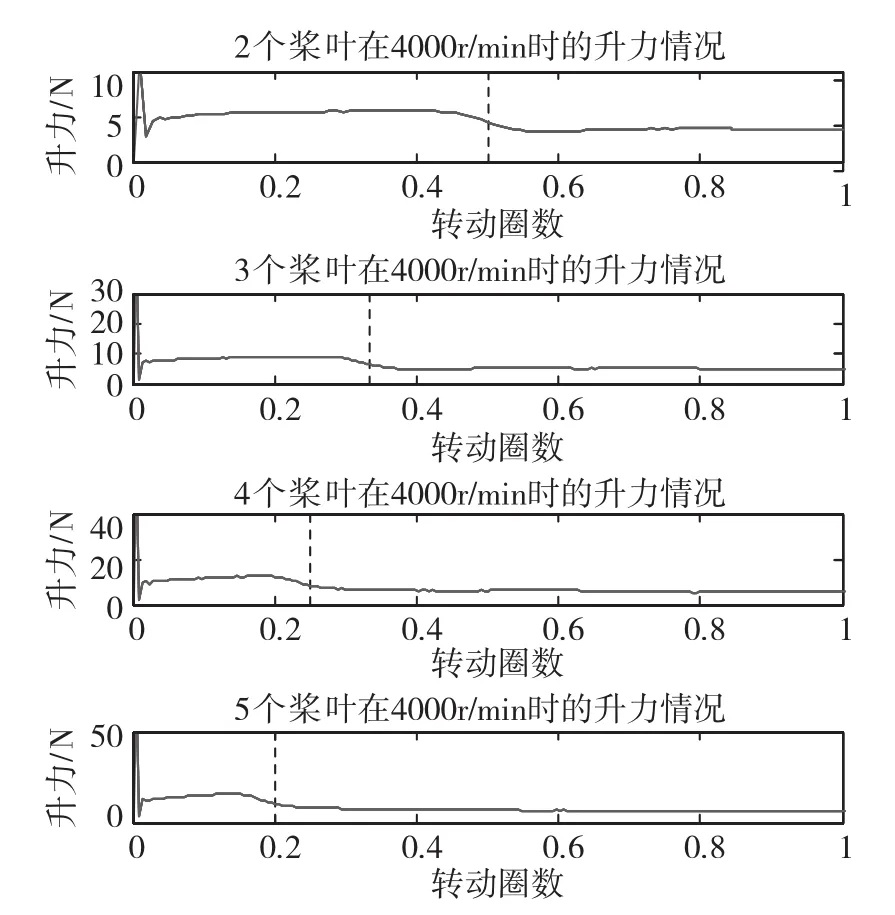
图4 螺旋翼的升力变化曲线Fig.4 Thrust of propeller
图5中,虚线、实线的定义与图2一致,圆圈的数据为图4中虚线左端平稳时螺旋翼的升力。圆圈均高于星形,且近似于线性关系,说明在虚线位置之前,即与前一个叶片的位置重合之前,单个叶片的升力与总叶片数无关。图4中螺旋翼的升力在虚线位置处发生变化,这是因为前面的叶片运动产生的尾流改变了后一个叶片的流场环境,所以升力下降。
图6为单叶桨到五叶桨的桨盘平面内空气运动速度的分布情况。其中,颜色由浅变深表征着速度从低到高。通过颜色的深浅得出从单叶桨到五叶桨,桨叶前方的空气速度逐渐增大,速度依次为:1.5m/s、4.5m/s、6.0m/s、7.5m/s、9.0m/s。所以,螺旋翼升力减小的原因在于叶片与空气的相对运动速度减小。
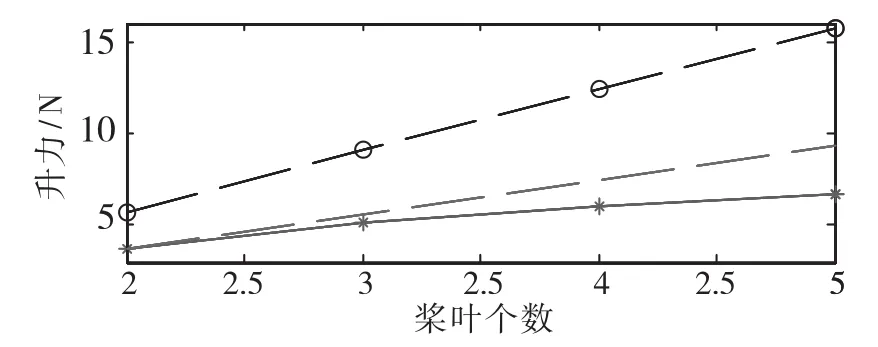
图5 螺旋翼升力与叶片个数Fig.5 Thrust and the number of blades
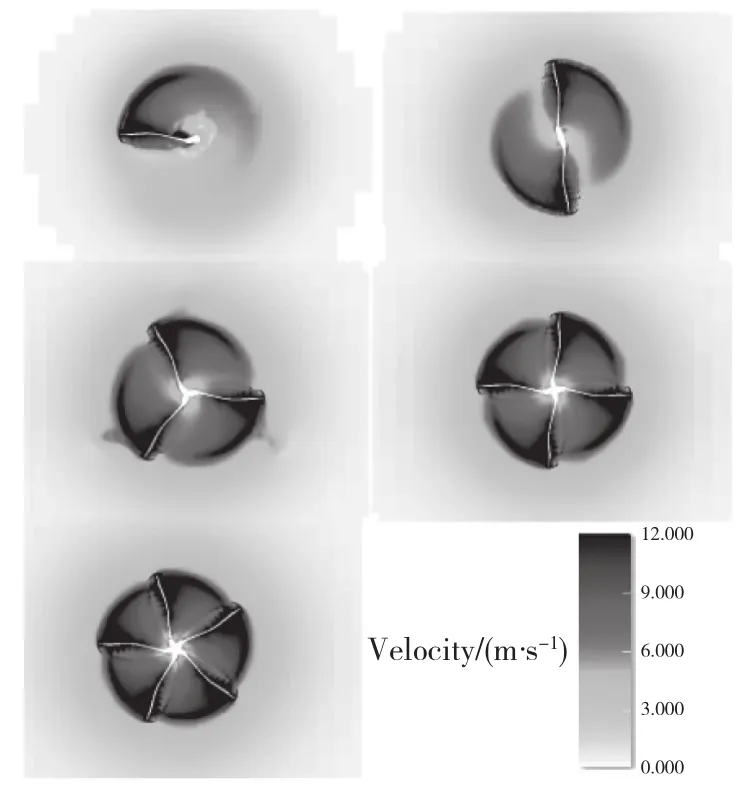
图6 螺旋翼桨盘平面的速度分布Fig.6 Velocity distribute at rotor plane
3 模型改进和验证
3.1 改进模型
根据前面的分析,假设N个叶片时螺旋翼引起的空气运动等效于角速度ΩN,则相对角速度为ω-ΩN。其中,ω是螺旋翼的角速度。将式(1)改为式(2):

式中,N为叶片的个数,C′为图4中虚线左端平稳处的升力系数。当螺旋翼的角速度稳定后,式(2)等于式(1),推出空气角速度与螺旋翼的转速关系。

空气角速度在刚开始转动时为0,转动了1/N圈时受到前一个叶片尾流的影响发生变化,此时的尾流是前一个叶片T秒之前产生的,所以空气角速度的频域表达式为式(4)。

式(4)中,输入输出中经过了比例环节、惯性环节和延迟环节。其中,TN为惯性环节系数。取延迟环节的传递函数为:

其中,p1=5/44,p2=1/66,p3=1/792,p4=1/15840,p5=1/665280。
3.2 模型验证
使用4阶龙格库塔法对该模型进行计算并与上面仿真的结果进行对比,如图7所示。
图7为空气角速度和升力随转动圈数的关系图,实线是通过软件仿真获得,虚线是由第1节提出的模型绘制;左列为空气角速度和转动圈数的变化图,右列为升力随转动圈数的变化图,从上到下螺旋翼的叶片个数分别为2、3、4、5。实线和虚线具有相同的变化规律,图7中实线与虚线在暂态时变化一致,稳态时的相对误差小于3%,说明模型的合理性。
4 结论
本文通过计算机建模构建了4个叶形相同但叶片数量不同的螺旋翼,通过仿真得出升力和叶片数为非线性关系,且增加叶片可以提高相同转速下螺旋翼的升力,但会降低螺旋翼的升阻比,使其效率降低。相比以前的模型,改进后的模型在参数上引入了空气角速度,增加了惯环节和延迟环节,增加了叶片数变化量;在结果上不仅描述螺旋翼的稳态值,而且可以反映螺旋翼的暂态过程。
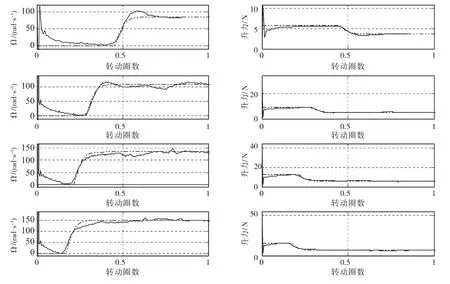
图7 仿真与模型结果对比Fig.7 Comparison between simulation and model
[1]崔海宁.热力学系统理论[M].长春:吉林大学出版社,2009. CUI Hai⁃ning.Thermodynamic system theory[M].Chang⁃chun:Jilin University Press,2009.
[2]郑海成.格子Boltzmann模拟动边界流动问题[D].吉林大学,2011. ZHENG Hai⁃cheng.Lattice Boltzmann simulation of flow with moving boundary[D].Jilin University,2011.
[3]Chen S,Chen H D,Martinez D,et al.Lattice Boltzmann modelforsimulationofmagnetohydrodynamics[J]. Physical Review Letters,1991,67(27):3776⁃3779.
[4]Qian Y H,d'Humières D,Lallemand P.Lattice BGK models for navier⁃stokes equation[J].Europhysics Letters,1992,17(6):479⁃484.
[5]齐书浩,刘素娟,张问明,等.低雷诺数下微型四旋翼飞行器气动和振动特性分析[J].噪声与振动控制,2013,33(5):53⁃57. QI Shu⁃hao,LIU Su⁃juan,ZHANG Wen⁃ming,et al.A⁃nalysis of aerodynamic and vibration characteristics of a micro quad⁃rotor helicopter with low Reynolds number[J]. Noise and Vibration Control,2013,33(5):53⁃57.
[6]Leishman J G,Bagai A.Challenges in understanding the vortex dynamics of helicopter rotor wakes[J].AIAA Jour⁃nal,1998,36(7):1130⁃1140
[7]Johnson W.A General free wake geometry calculation for wings and rotors[C].Proceedings of the 51thAnnual Forum of the AHS International,USA:AHS International,1995:137⁃153.
[8]李春华.时间准确自由尾迹方法建模及(倾转)旋翼气动特性分析[D].南京航空航天大学,2007. LI Chun⁃hua.Modelingontime⁃accuratefreewake method and investigation on aerodynamic characteristics of rotor and tiltrotor[D].Nanjing University of Aeronautics and Astronautics,2007.
[9]陈文轩.旋翼流场流动机理研究[J].直升机技术,2011,167(2):1⁃14+44. CHEN Wen⁃xuan.Study on the flow mechanism of rotor flow field[J].Helicopter Technique,2011,167(2):1⁃14+44.
Research on the Model of Multi⁃blade Rotary Wing
LV Teng,WEI Zong⁃kang
(Beijing Institute of Aerospace Control Devices,Beijing 100039)
There are 4 propellers,which have same shape but a different number of leaf blades,are constructed through computer software and used for fluid dynamics simulation.It was shown from the simulation that there is an inverse proportional relationship between thrust generated by a single blade and the number of blades in the rotary wing.Air angular velocity variable,inertia and delay segment are introduced to improve the previous model.The improved model not only can calculate multi⁃blade rotary⁃wing lift,but also can reflect the transient state of the trust during a change of angular velocity.
propellers;thrust;multi bladed
V211.4
A
1674⁃5558(2017)03⁃01231
10.3969/j.issn.1674⁃5558.2017.01.015
吕腾,男,硕士,导航、制导与控制专业,研究方向为飞行器控制。
2016⁃01⁃12
