基于三维生物散斑技术的牛肉质构特性预测
2017-03-03董庆利刘宝林
金 曼,董庆利*,刘宝林
(上海理工大学医疗器械与食品学院,上海 200093)
基于三维生物散斑技术的牛肉质构特性预测
金 曼,董庆利*,刘宝林
(上海理工大学医疗器械与食品学院,上海 200093)
三维成像技术能够获得样品的空间信息,具有快速、方便、可实时的特点。为了缩短生物散斑技术的检测时间,减小其应用的局限性,将三维成像技术引入到传统生物散斑技术中,以期得到更好的预测效果。分别从两个不同角度拍摄同一样品的图像信息,利用广义差分法对图像进行预处理,并运用灰度模板匹配法、小波变换法和对比度调制融合法对两个角度的图像进行匹配融合,以时间序列散斑图灰度共生矩阵的参数对比度表示图像的散斑活性,建立其对牛肉质构特性的预测模型。通过传统相机标定法,获得相机的内外参数,并利用相似三角形原理提取图像的深度信息,对因物体摆放位置不同引起的误差进行校正,使获得的结果更加准确。结果表明,相似三角形原理可对样品的深度信息进行校正。三维生物散斑技术能更好地对牛肉的硬度和咀嚼性进行预测,对3 种图像融合方法进行比较可知,小波变换法的预测效果最好,对硬度和咀嚼性的预测相关系数分别可达到0.944 4和0.928 8。
生物散斑;三维成像;牛肉;质构特性
牛肉质构特性的传统检测法测定结果较为准确,但具有操作复杂、费时费力、对样品具有破坏性等特点[1],因此,包括计算机视觉、高光谱技术在内的一系列无损检测方法受到了越来越多学者的关注[2-3]。生物散斑技术通过表征出不同样本因细胞大小和组成的不同,对光能量的吸收和反射会产生不同的特点,实现对不同样本特征参数的预测[4]。作为一种无损检测技术具有设备简单、成本低、快速、可实时的特点[5]。生物散斑技术已在许多领域得到了较多的应用[6],但在传统生物散斑对牛肉品质进行预测时,还存在图像采集时间长、采集过程受样品形状及摆放位置限制等缺点,为了改进这些不足,将三维生物散斑技术引入到牛肉质构特性预测的研究中,利用双目视觉技术获得同一样品不同角度的图像,使获得的图像信息量增多,以期得到更好的结果。
三维生物散斑基于双目立体视觉技术,这一技术由美国麻省理工学院Marr提出并使之得以运用[7]。利用双目立体视觉技术模拟人类双眼处理景物的方式,通过计算,从两幅由不同角度拍摄的平面图像中获取其所包含的物体深度信息。这种技术简单可靠,在许多领域发挥了较大的应用价值,如智能交通管理[8]、农业机器人[9]、考古[10]等。在农产品品质测定中具有不受摆放位置和拍摄角度等问题影响的优点[11]。在应用于生物散斑技术时,由于拍摄角度的增多,可从单幅图像中获得更多的信息,从而使测定时间有所缩短,并在图像中提取样品的深度信息,对样品的散斑活性进行校正。
本实验采用He-Ne激光器照射牛肉表面,通过工业相机从不同角度获取同一场景牛肉图像,采用广义差分(generalized differences,GD)法对获得的视频进行处理得到样品的GD图像,通过提取GD图像中的特征点对两幅图像进行匹配,研究不同质构特性牛肉的散斑匹配图像,分析图像的纹理特征,得到散斑活性对牛肉质构特性的预测模型,为基于三维激光散斑技术的牛肉测定方法提供理论依据。
1 材料与方法
1.1 材料与设备
屠宰于24 h内的冷鲜牛里脊肉购于上海市当地超市,用刀具切成5 cm×5 cm×6 cm大小的30 块,用质量分数1%的乳酸溶液清洗消毒,并用保鲜袋独立密封包装,贮存于4 ℃冰箱中熟化。实验过程中每48 h对冷鲜牛肉样品进行观测与拍照,直到牛肉质构特性趋于稳定,进行成像后的样品移入-18 ℃条件下冻结并存放,用于后续测定。成像过程为用同一相机先后从不同角度对样品进行拍摄,采集所需图像。两次图像采集的角度为60°,实验中工业相机采集图像分辨率为640像素×486像素,图像获取速率为25帧/s,图像采集时间为5 s,每次图像采集重复3 次[12]。图像拍摄装置如图1所示。

图1 成像装置系统实物图Fig.1 Picture of imaging system
1.2 仪器与设备
DFM 72BUC02型工业相机 上海英诚图像技术有限公司;HH600-2B型恒温水浴锅 上海比朗仪器有限公司;HLM 1845型激光发射器 广东省深圳市铂镭公司;P428型便携式计算机 韩国三星公司;食品中心温度计 上海天垒仪器仪表有限公司;激光扩束镜北京盛亚康科技有限公司;DZ-280/2 SE型真空包装机天津市绿叶公司;TA. XT. Plus型物性测试仪 英国SMS公司。
1.3 方法
1.3.1 牛肉质构特性的测定
取进行图像获取时的样品于塑料袋中在80 ℃水浴中加热至中心温度达到70 ℃后取出,冷却至50 ℃,将每个熟肉样品切成1.5 cm3大小的10~15 个小块进行质构特性的测定,测定方法选用质构剖面分析(texture profile analysis,TPA)法[4],选取指标包括硬度、弹性、黏聚性和咀嚼性。TPA测定参数为:测前速率2.0 mm/s,测中速率5.0 mm/s,测后速率10.0 mm/s,压缩比50%,2 次压缩间隔5.0 s,负载类型Auto-50g,探头P50。
1.3.2 生物散斑图像获取及预处理
图像的预处理采用GD法,通过关注同一样品不同时间多幅图像的变化,可以得到样品表面的统计特征图。通过样品表面的统计特征图反映出样品不同部位活性的高低,活性越高的部分图像越亮。具体计算公式见式(1)[14]:

式中:x表示图像中某一确定位置的点;i、j表示不同时刻;GD为强度视频中不同帧间的强度差的累计值。1.3.3 散斑活性的计算
应用美国MathWorks公司开发的Matlab R2 014a软件对实验所得视频进行处理,记录牛肉样品的生物散斑图像变化,使用转动惯量法计算散斑活性,计算见公式(2)~(4)[15]:


式中:COM为时间序列散斑图的灰度共生矩阵;i、j为像素的灰度值;Nij为像素i后面接着出现像素j的次数;Mij为Nij占i与j(j取1~j)所有像素组合出现次数的比例;IM为非零元素偏离主对角线的程度(散斑活性)。
1.3.4 生物散斑图像的三维重建
1.3.4.1 相机的标定
相机的标定通过一系列的测量确定相机拍摄图像的像素位置与实际空间位置之间的关系从而获取相机的内外参数[16],包括相机坐标、焦距、径向畸变系数以及横向畸变系数等内部参数以及旋转矩阵、平移矩阵等外部参数。本研究采用传统标定方法,使用的标定物为自制14格×14格的黑白格相间棋盘标定板,标定板中每个小正方形方格的边长为30 mm。保持相机位置不变,从不同角度拍摄10 组标定图像,标定算法在Matlab(R2014a)相机标定工具箱中进行。具体步骤如下:1)将摄像机所拍的不同位置标定板的图像上传至程序;2)手动选取出每幅图像的标定标定,由程序计算自动获取图像的Harris角点;3)输入标定板的各项参数,确定标定范围;4)根据标定模型进行运算,得到各项参数;5)分析误差,设定修订值重新计算,得到最终参数值。
1.3.4.2 目标的检测与图像匹配
1)灰度模板匹配
模板匹配是指用一个较小的图像,即模板与源图像进行比较,以确定在源图像中是否存在与该模板相同或相似的区域,若该区域存在,则确定其位置并提取该区域。从该位置开始将两幅图像融合,得到最后图像。模板匹配程度通常误差平方和D(x,y)来评价,D(x,y)达到最小时匹配程度最高。设f(x,y)为M×N的源图像,h(j,k)为J×K的模板,则误差平方和定义为:

2)对比度调制融合
对比度调制融合算法通过提取图像中所包含的对比度信息,用以匹配另一幅图像的灰度分布从而达到图像融合的目的,应用Matlab中的contrastmodulate函数实现,对比的计算方法为中心像素灰度值与周围近邻像素灰度值之差的平方之和,乘以相应灰度差的分布概率。这种方法可以很好地兼顾清晰度和光滑度两个方面[17]。
3)小波变换融合
对原始图像进行N层小波分解,对各个分解层进行融合处理,对融合后的小波进行逆变换,得到融合图像。根据需要,针对不同频率分量、不同方向、不同分解层采用不同的融合规则进行融合处理,就可以充分利用图像的互补和冗余信息来达到良好的融合效果。本研究通过wname函数对图像进行5层分解,对应高频和低频融合规则分别为取最大值和最小值法。
1.3.4.3 深度信息的获取及散斑活性的校正
通过相机标定,可获得相机的一系列内外参数,通过转换公式,可以获取空间内任一点在左右相机坐标系下的坐标[18]:

式中:fx、fy为相机在x和y轴上的焦距;s为扭转因子;(u0v0)为主点坐标;(uv)为某点在图像上的坐标。

图2 深度信息获取原理图Fig.2 Principle diagram of in-depth information acquisition
深度信息的获取原理如图2所示。图中P为样品上某一点,C1、C2为两次成像时相机的位置,H为样品上某点到相机的垂直距离,Z为两次成像相机间距离。x,x’为空间内任一点在左右相机坐标系下的横坐标,可通过式(6)计算而得,f为相机物镜后节点到相片主点的垂直距离,即主距。
根据相似三角形原理,得到计算公式如下[19]:

1.4 数据处理与统计分析
研究中涉及的数据处理与统计分析在软件WPS Off i ce 9.1.0.4984中进行。平均数均为算术平均数,标准差为标准偏差。方差分析运用最小显著差异法(least significant difference,LSD)进行均值多重比较,在SPSS Statistic 17.0软件中进行。
2 结果与分析
2.1 相机的标定
研究中采用传统相机标定法对相机进行标定,使用尺寸已知的自制标定板(14格×14格的黑白格相间纸板,每小格边长为30 mm),从不同的角度(左60°、45°、30°,右60°、45°、30°,上60°、45°、30°,下60°、45°、30°)拍摄,共获得12 幅图像,在标定过程中手动选定图像的标定范围即黑白相间部分的外框,经过Matlab R2014a中的相机标定工具箱手动选取标定范围可自动获得整幅图像的Harris角点。输入标定板的格数及边长。点击标定按钮,得到标定结果,分析误差,当误差在0.1~0.3之间即为标定成功,否则需设定修订值重新计算,得到最终结果。
利用Matlab工具箱计算得:[fxfy]=[665.77 665.77]± [2.43 2.43]、(u0v0)=[319.50 239.50]±[0.00 0.00]、s=[0.000 4±0.001 9],式中:扭转因子s接近于零,说明此次标定较为成功,为下一步实验中样品深度信息的获取奠定基础。
2.2 图像的匹配与融合

图3 融合后的图像Fig.3 Pictures after fusion
图像的匹配与融合分别采用灰度模板匹配、小波变换和对比度调制融合法,两次拍摄分别使用15 帧图像进行融合后得到其中一个样品的图像如图3所示。通过对3 种方法所得图像进行分析,可知,灰度模板匹配法得到的图像散斑活性值在100以内,小波变换法为100~300之间,而对比度调制融合法所获得的图像散斑活性值最高,均在400以上。此外,因为灰度模板匹配法与对比度调制融合法在计算过程中均需将图像转换为灰度图,因此仅能得到黑白图像,只有小波变换法所得图像为彩色。因此,仅从散斑活性值的高低来选取融合方法较为不科学,需在预测过程中进一步比较选择。
2.3 深度信息的获取及散斑活性的校正
通过相机标定获得相应参数,应用相似三角形原理获得样品的深度信息,如表1所示。

表1 样品的深度信息Table1 In-depth information of the samples
通过进行预实验在距离样品不同位置获得样品的图像,分析图像的散斑活性,得到二者之间的相关关系,从而建立散斑活性与样品深度之间的关系式如下:

式中:x为样品与相机间的距离;Y为样品的散斑活性。
应用式(8)可对距离相机不同距离样品的散斑活性进行校正,减少因样品摆放位置的不同产生的误差,使预测结果更接近实际情况。
2.4 牛肉质构特性的测定结果注:数值表示形式为

表2 牛肉质构特性机械测定结果Table2 Results of instrumental measurements of beef texture
由TPA法对牛肉的质构特性进行测定,结果如表2所示,不同处理样品间硬度、咀嚼性两个指标差异显著(P<0.05),且呈下降趋势,这一结果与杨启元等[20]的研究相似,可能与牛肉在熟化过程中发生的物理化学变化有关[21]。同时,不同样品间的黏聚性与弹性变化较不明显,未呈现出明显的趋势,可能与样品本身差异较小有关。因此在建立牛肉质构特性预测模型时,只对硬度及咀嚼性两个指标进行分析。
2.5 牛肉质构特性预测模型的建立
通过对30 块牛里脊肉的散斑活性与质构特性进行分析,建立了散斑活性对硬度和咀嚼性的预测模型如图4~5。由图4可知,三维生物散斑技术对两种指标的预测均呈现较好的结果(硬度R2=0.832,咀嚼性R2=0.768)。其中,应用小波变换融合法获得的图像预测效果最好(硬度R2=0.944 4,咀嚼性R2=0.928 8),灰度模板匹配法、对比度调制融合法的预测相关系数略低于小波变换融合法。对比度调制融合法获得的图像对比度最高,预测效果却略逊于小波变化法,可能是因为图像过于细致,使其所获得的信息包含过多噪声,从而影响预测结果。

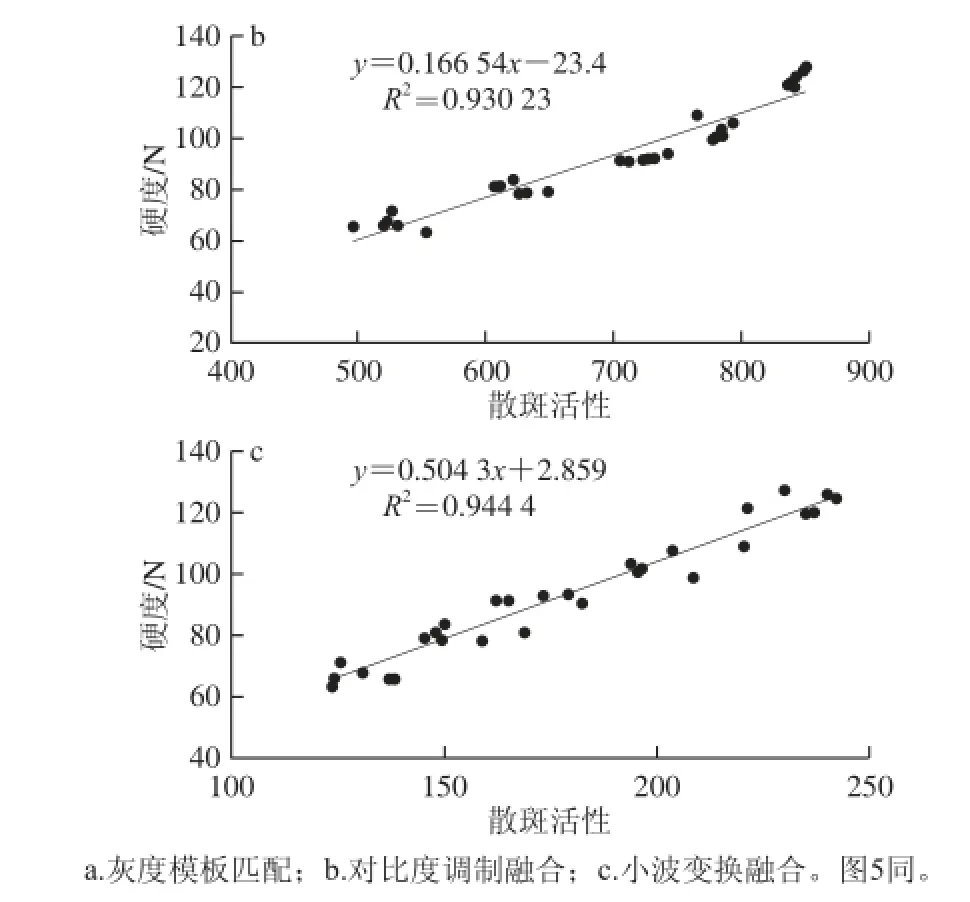
图4 散斑活性对硬度的预测曲线Fig.4 Predictive curves of speckle activity for hardness

图5 散斑活性对咀嚼性的预测曲线Fig.5 Predictive curves of speckle activity for chewiness
3 讨 论
3.1 图像融合方法的选择
在对所获图像进行融合时,选择了灰度模板匹配法、对比度调制融合法和小波变换融合法。灰度模板匹配法通过搜索模板与图像之间的相似位置,并计算二者灰度相似程度实现对图像的匹配,已在目标识别[22]、工业检测[23]等多个领域得到应用。灰度模板匹配法是图像模式匹配的经典方法之一,但这种方法对图像采集时的光线变化、图像中的噪声和图像的失真等因素较为敏感[24]。对比度调制融合法则根据包含细节信息较多的图像来进行调制,过程简单是一种较为实用的技术,常用于要求不高的情况。小波变换法通过将两图像互补性信息结合起来产生新图像,在医学、遥感等领域取应用广泛[25],但其对高频分量邻域特征的细致性则考虑不足。3 种方法各有优缺点,通过对3 种融合方法得到的图像均可较好的对牛肉的质构特性进行预测,而小波变换法的预测效果最好,对硬度和咀嚼性的预测相关系数分别达到0.944 4和0.928 8。
3.2 三维生物散斑与传统生物z散斑技术的比较
研究中针对传统生物散斑技术具有图像采集时间长,对光线及其他因素敏感,易受样品摆放位置及样品形状的影响等缺点,对其进行了改进。由于三维生物散斑技术从两个不同的角度对样品进行成像,获得的样品信息会更加丰富[26],也可通过双目视觉原理,获得样品的深度信息[27],降低样品摆放位置和形状因素对结果的影响。结果表明,当三维生物散斑技术采集图像数为15 帧时获得的图像对牛肉质构特性的预测效果不亚于董庆利等[12]运用传统生物散斑技术获得15 s图像的预测效果,使图像采集时间大大缩短。此外,通过对样品深度信息的获取,可对样品因摆放位置差异造成的误差进行校正,一定程度上克服了计算机视觉技术对样品一致性要求严格的缺陷。
通过三维生物散斑技术,可获得样品更全面的信息,使图像采集时间大大缩短,并可对样品的深度进行校正,减少外在条件对成像的干扰,从而提高其对牛肉品质的预测效果。灰度模板匹配法、小波变换融合、对比度调制融合法都可较好地对牛肉的硬度及咀嚼性进行预测,其中小波变换融合法的预测效果最佳,对硬度的预测相关系数为0.944 4,对咀嚼性的预测相关系数达到0.928 8。
[1] JACKMAN P, SUN D W, ALLEN P. Recent advances in the use of computer vision technology in the quality assessment of fresh meats[J]. Food Science & Technology, 2011, 22(4): 185-197. DOI:10.1016/ j.tifs.2011.01.008.
[2] CHANDRARATNE M R, SAMARASINGHE S, KULASIRI D, et al. Prediction of lamb tenderness using image surface texture features[J]. Journal of Food Engineering, 2006, 77(3): 492-499. DOI:10.1016/ j.jfoodeng.2005.06.063.
[3] XIONG Zhenjie, SUN Dawen, ZENG Xinan, et al. Recent developments of hyperspectral imaging systems and their applications in detecting quality attributes of red meats: a review[J]. Journal of Food Engineering, 2014, 132: 1-13. DOI:10.1016/j.jfoodeng.2014.02.004.
[4] ROMERO G G, MARTINEZ C C, ALANI’S E E, et al. Biospeckle activity applied to the assessment of tomato fruit ripening[J]. Biosystems Engineering, 2009, 103(1): 116-119. DOI:10.1016/ j.biosystemseng.2009.02.001.
[5] 董庆利, 金曼, 胡孟晗, 等. 牛肉激光动态散斑活性影响因素的研究[J]. 农业机械学报, 2016, 47(2): 288-294. DOI:10.6041/ j.issn.1000-1298.2016.02.038.
[6] CARDOSO R R, BRAGA R A. Enhancement of the robustness on dynamic speckle laser numerical analysis[J]. Optics and Lasers in Engineering, 2014, 63: 19-24. DOI:10.1016/j.optlaseng.2014.06.004.
[7] 曹之乐, 严中红, 王洪. 双目立体视觉匹配技术综述[J]. 重庆理工大学学报, 2015, 29(2): 70-76. DOI:10.3969/j.issn.1674-8425(z).2015.02.014.
[8] YAO Jinli, CI Yanke. The research of virtual reality technology based on city intelligent transport[C]//Cambridge: 2015 10th International Conference on Computer Science & Education, 2015: 1-6. DOI:10.1109/ICCSE.2015.7250391.
[9] FENG Qingchun, CHENG Wei, ZHOU Jianjun, et al. Design of structured-light vision system for tomato harvesting robot[J]. International Journal of Agricultural and Biological Engineering, 2014, 7(2): 19-26. DOI:10.3965/j.ijabe.20140702.003.
[10] BRUNO F, BRUNO S, de SENSI G, et al. From 3D reconstruction to virtual reality: a complete methodology for digital archaeological exhibition[J]. Journal of Cultural Heritage, 2010, 11(1): 42-49. DOI:10.1016/j.culher.2009.02.006.
[11] 任兴超, 郑丽敏, 任发政, 等. 三维重建在猪胴体体型特征提取中的应用[J]. 肉类研究, 2013, 27(10): 1-5.
[12] 董庆利, 金曼, 胡孟晗, 等. 基于生物散斑技术的不同部位牛肉质构特性预测模型改进[J]. 农业机械学报, 2016, 47(4): 209-215. DOI:10.6041/j.issn.1000-1298.2016.04.028.
[13] 朱丹实, 李慧, 曹雪慧, 等. 质构仪器分析在生鲜食品品质评价中的研究进展[J]. 食品科学, 2014, 35(7): 264-270. DOI:10.7506/ spkx1002-6630-201407052.
[14] MINZ P D, NIRALA A K. Bio-activity assessment of fruits using generalized difference and parameterized Fujii method[J]. Optik, 2014, 125(1): 314-317. DOI:10.1016/j.ijleo.2013.06.061.
[15] ARIZAGA R, TRIVI M, RABAL H. Speckle time evolution characterization by the co-occurrence matrix analysis[J]. Optics and Laser Technology, 1999, 31(2): 163-169. DOI:10.1016/S0030-3992(99)00033-X.
[16] 王平, 韩燮, 韩焱, 等. 基于双目视觉技术的物体深度信息的提取[J]. 科学技术与工程, 2014, 14(2): 56-61. DOI:10.3969/ j.issn.1671-1815.2014.02.013.
[17] 陈艳海. 基于Harris特征点和对比度调制的图像拼接算法[J]. 中国科技信息, 2011(12): 76-78. DOI:10.3969/j.issn.1001-8972.2011.12.044.
[18] TANG Wusheng, TIAN Lihong, ZHAO Xilu. Research on displacement measurement of disk vibration based on machine vision technique[J]. International Journal for Light and Electron Optics, 2016, 127(8): 4173-4177. DOI:10.1016/j.ijleo.2016.01.019.
[19] 李玉良. 基于立体视觉的遮挡柑橘识别与空间匹配研究[D]. 镇江:江苏大学, 2007: 1-10.
[20] 杨启元, 施远翔, 张晓红, 等. 新鲜牛肉贮藏时间和系水力对其嫩度变化的相关性分析[J]. 新疆畜牧业, 2010(7): 11-14. DOI:10.3969/ j.issn.1003-4889.2010.07.005.
[21] VITALE M, PÉREZ-JUAN M, LLORET E, et al. Effect of aging time in vacuum on tenderness, and color and lipid stability of beef from mature cows during display in high oxygen atmosphere package[J]. Meat Science, 2014, 96(1): 270-277. DOI:10.1016/ j.meatsci.2013.07.027.
[22] HSU R L, MOHAMED A M, JAIN A K. Face detection in color images[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2002, 24(5): 696-706. DOI:10.1109/34.1000242.
[23] 谭刚, 董祥龙, 徐继, 等. 基于机器视觉的玻璃瓶表面缺陷检测[J].上海工程技术大学学报, 2009, 23(2): 111-114.
[24] 张建华. 基于灰度的模板匹配算法研究[D]. 呼和浩特: 内蒙古农业大学, 2013: 1-8.
[25] WANG W X, WANG F P, HUANG X J, et al. Rock fracture image acquisition using two kinds of lighting and fusion on a wavelet transform[J]. Bulletin of Engineering Geology and the Environment, 2016, 75(1): 311-324. DOI:10.1007/s10064-015-0747-4.
[26] LIU W, DING L C, ZHAO K, et al. Precise Positioning method for multi-process connecting based on binocular vision[C]// Xiamen: Seventh International Symposium on Precision Mechanical Measurements, 2012: 1.
[27] KAWAKAMI T, DATE M, SASAI M, et al. Optical linear blending of viewing zones using convolution of iris for smooth motion parallax autostereoscopic 3D display[J]. Journal of Display Technology, 2016, 12(2): 143-152. DOI:10.1109/JDT.2015.2471097.
Prediction of Beef Texture Based on Three-Dimensional Biospeckle
JIN Man, DONG Qingli*, LIU Baolin
(School of Medical Instrument and Food Engineering, University of Shanghai for Science and Technology, Shanghai 200093, China)
Three-dimensional imaging technology is a low-cost, portable and online screening tool for optical non-destructive testing, which allows the obtainment of the space information of samples. Three-dimensional biospeckle was applied in the prediction of beef texture to minimize the detection time and reduce the limitations of its application. The images of samples were acquired at two different angles, pre-proccessed by generalized difference (GD), and fused by gray template matching, wavelet transform, and contrast modulation fusion separately. A temporal history of speckle patterns viz. inertia moment was used as the speckle activity to establish a prediction model for beef texture. The traditional camera calibration method was used and the internal and external parameters of the camera were established. In-depth information from the images was extracted based on the similar triangle principle. The results showed that three-dimensional biospeckle could enable better prediction of beef texture. Among three image fusion methods, wavelet transform provided the best prediction performance, with correlation coeff i cients of 0.944 4 and 0.928 8 for the prediction of hardness and chewiness, respectively.
biospeckle; three-dimensional imaging technology; beef; texture characteristics
10.7506/spkx1002-6630-201703005
TS251.52
A
1002-6630(2017)03-0026-06
金曼, 董庆利, 刘宝林. 基于三维生物散斑技术的牛肉质构特性预测[J]. 食品科学, 2017, 38(3): 26-31. DOI:10.7506/ spkx1002-6630-201703005. http://www.spkx.net.cn
JIN Man, DONG Qingli, LIU Baolin. Prediction of beef texture based on three-dimensional biospeckle[J]. Food Science, 2017, 38(3): 26-31. (in Chinese with English abstract)
10.7506/spkx1002-6630-201703005. http://www.spkx.net.cn
2016-03-31
“十二五”国家科技支撑计划项目(2015BAK36B04);国家自然科学基金面上项目(31271896);上海市科委2015年长三角科技联合攻关领域项目(15395810900)
金曼(1990—),女,硕士,研究方向为农产品无损检测。E-mail:jinmanjm@126.com
*通信作者:董庆利(1979—),男,教授,博士,研究方向为畜产品安全和质量控制。E-mail:dongqingli@126.com